一、概述
2014-04-13 13:49:20
中國儲運 2014年12期
一、概述
一些昆蟲類動物,長有身體以外的骨骼,具有支撐、保護身體的作用,被稱為外骨骼。人工裝卸搬運助力裝置是一種人機結(jié)合的外骨骼機械助力裝置,根據(jù)仿生學的思想,為穿戴者設計一套體外支架,通過均衡分配外掛物重量,傳導、放大穿戴者的肢體動感,做到既增強個人負重能力,又保持其行動靈活性,它不受地面路況、天氣環(huán)境以及作業(yè)空間的約束,其控制系統(tǒng)可以使“助力裝置”與使用者的四肢運動保持協(xié)調(diào)一致,負重通過“助力裝置”轉(zhuǎn)移到地面,人體感受的負重只有實際負重的10%,從而極大地減少穿戴者的體能消耗,使其在高強度作業(yè)后仍然保持較充沛的體能,提高作業(yè)效率。
二、研究現(xiàn)狀
該技術是近年來的熱點研究領域,屬于特種機器人的范疇,其涉及機器人學、人體工程學、控制理論、傳感器技術、信息處理技術等領域。其研究內(nèi)容包括外骨骼機械裝置、人-機系統(tǒng)運動學和動力學分析、多傳感器信息融合理論、人體運動意圖的判別及控制方法等方面。
1.國外情況
美國是世界上首先開展人工裝卸搬運助力裝置研究的國家,其定義為“外骨骼服”。早在20世紀60年代,美國通用電器公司研發(fā)出一種基于主從控制的外骨骼服原型機,命名為哈迪曼(Hard im an)。美國國防部高級研究項目局于2000年出資五千萬美元用于資助對能夠增強人體機能的外骨骼(Exoske le ton for Hum an Perform ance Augum entation,EHPA)的研究與開發(fā)。獲得該項目資助的有加州大學伯克利分校的人體工程實驗室(HEL)、雷神薩科斯公司(Ray theon Sarcos)、橡樹嶺國家實驗室(ORNL)和M illenn ium Je t等多家研究機構(gòu)。其中,加州大學伯克利分校于2004年率先研制出下肢外骨骼單兵助力系統(tǒng)BLEXX系列(圖1),該裝置為液壓驅(qū)動,可使士兵負重量達到75kg,并以0.9m/s的速度行走,在沒有負重的情況下,能以1.3m/s的速度行走。
另外,伯克利分校和洛克希德馬丁公司共同研制了新一代單兵負重系統(tǒng)HULC(Human Universal Load Carrier),該裝置可明顯降低使用者對氧氣的消耗量,可保證穿戴者以4.8km/h的速度背負90kg重物持續(xù)行進一個小時,而沖刺速度則可達到16km/h。
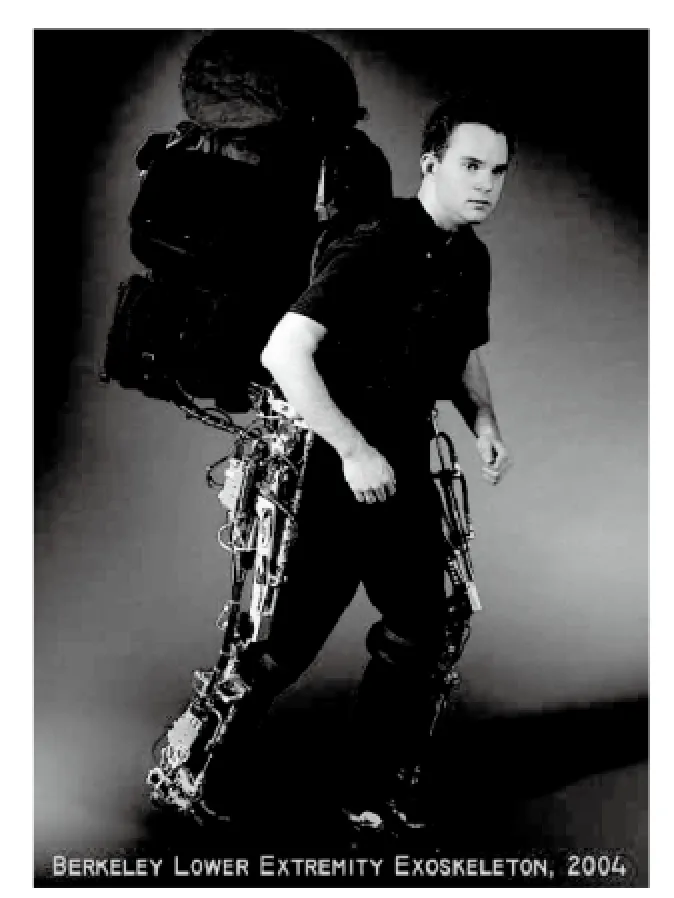
圖1 BLEXX系列外骨骼
2011年在法國巴黎舉行的國際軍警保安器材展(M ILIPOL)上,法國某防務公司展出了其與法國武器裝備總署聯(lián)合研制的名為“大力神”(HERCULE)的協(xié)同可穿戴式外骨骼服。“大力神”外骨骼的獨特之處在于不采用無線電控制,能夠自動探測到肢體運動,隨后根據(jù)支持意圖代替穿戴者執(zhí)行這一動作。
上述外骨骼服只能定義為下肢外骨骼系統(tǒng),僅具有負重行走功能。因此,美軍進一步將現(xiàn)有下肢助力外骨骼裝置開發(fā)成可穿戴全身外骨骼服,目前比較有影響力的是洛克希德-馬丁公司的HULC(圖2)和雷神公司的XOS2。這兩種外骨骼服除了具備負重行軍能力外,還增加了雙上肢助力功能,具有較強的物資裝卸搬運作業(yè)能力,穿戴者人體承受的重量僅為實際重量的十分之一,大大降低了體能消耗。

圖2 全身助力單兵負重系統(tǒng)(HULC)
日本神奈川理工學院研制的Pow e r Assis t Su it(PAS)可以增加人體的力量0.5到1倍。日本筑波大學Cybernics實驗室研制出世界上第一種商業(yè)外骨骼服(Hybrid Assistive Leg,HAL)。這種裝置能幫助人們以每小時4公里的速度行走,毫不費力地爬樓梯,其第五代產(chǎn)品HAL-5為全身式外骨骼服(圖3),具備上肢助力功能,能夠搬運重物,減輕穿戴者體力消耗。
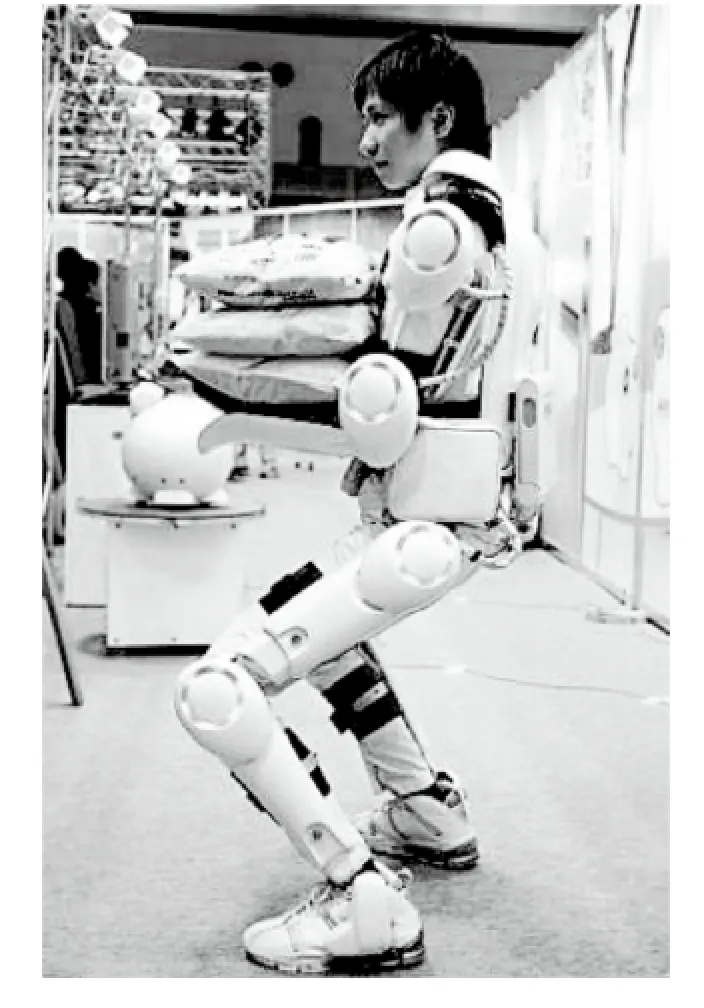
圖3 日本HAL-5外骨骼服
此外,俄羅斯、英國、印度等國均在人工裝卸搬運助力裝置研究方面取得了一定進展。
2.國內(nèi)情況
近年來,我國有多家單位相繼開展了外骨骼助力裝置的研究工作。目前已開展相關研究的科研院所有中科院、中國科技大學、浙江大學、哈爾濱工業(yè)大學、清華大學、上海交通大學、北京航空航天大學、上海大學等單位,其研究重點為輔助肌肉、骨骼疾病的康復,幫助老年人行走,甚至讓癱瘓病人站起來進行康復訓練,在控制、減重、縮小體積等方面取得不小進展,并有相關產(chǎn)品問世。

圖5 人體行走動作分析
軍內(nèi)已有海軍航空工程學院、總裝工程兵裝備論證實驗研究所、軍事醫(yī)學科學院衛(wèi)生裝備研究所、軍事交通學院等單位開展外骨骼助力裝置研究,研究目的具有明顯的軍事性。海軍航空工程學院在2004年開展了外骨骼服的研制,并分別于2006年和2008年研制出了第一代和第二代能量輔助骨骼服。2013年,南京軍區(qū)總醫(yī)院博士后工作站研制成功了“單兵負重輔助系統(tǒng)”(圖4)。該系統(tǒng)能使人體骨骼的承重減少50%以上,讓普通士兵成為大力士,能輕松完成背負作戰(zhàn)物資與裝備跨越“障礙”的任務。
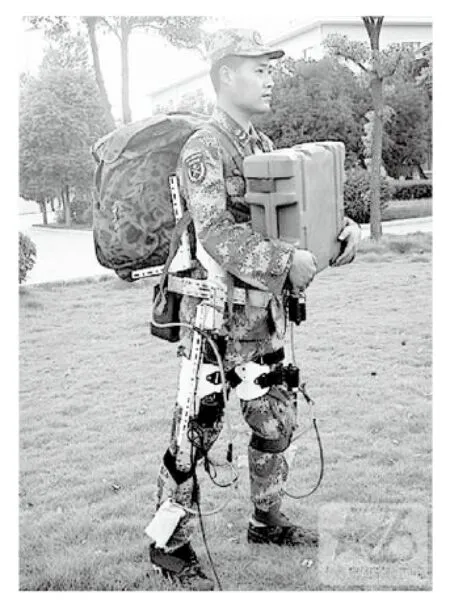
圖4 單兵負重輔助系統(tǒng)
三、關鍵技術
1.獲取人體動作信號
適合于人工裝卸搬運助力裝置的人體信號獲取方式大致可分為三類。第一類為基于人體腦電信號的采集方式。腦電信號微弱、噪聲大、研制成本高、提取困難、數(shù)據(jù)處理程序較為復雜。適合用于肢體癱瘓患者助力裝置的設計。第二類為基于人體表面肌電信號的采集方式。該方法穿戴不便,采集信號易受干擾,穩(wěn)定性和準確性差,控制難度大。第三類為基于運動物理信號的采集方式。人體穿戴助力裝置后,人體動作、人和助力裝置之間、助力裝置和地面之間都會產(chǎn)生較為穩(wěn)定、有規(guī)律、不易受干擾,且易于采集的運動物理信號,為了保證快速、準確采集信號,必須在助力裝置和人體上使用大量不同類型的傳感器裝置。
目前在軍事領域應用的人工裝卸搬運助力裝置大多采用第三類方式采集信號。
2.分析人體動作
根據(jù)所采用的信號采集方案,具體設計和布局傳感器類型、數(shù)量以及優(yōu)化安裝位置,并對傳感器信號進行測量分析,為跟隨系統(tǒng)的設計提供數(shù)據(jù)支持。圖5為人體行走時下肢動作分析。將人體動作三維掃描數(shù)據(jù)導入到仿真軟件中,構(gòu)建仿真模型,分析人體各關節(jié)運動曲線和力學參數(shù),進行信號采集點的優(yōu)化。
3.設計跟隨系統(tǒng)控制策略
根據(jù)采集的人體運動信號判斷推導人體運動意圖,研究跟隨系統(tǒng)的控制策略,構(gòu)建跟隨系統(tǒng),分析研究影響人工助力裝置與人體動作一致性的因素。裝卸搬運助力裝置基本控制結(jié)構(gòu)見圖6。
4.選擇助力裝置驅(qū)動方式
根據(jù)穿戴者重量、助力裝置自重以及作業(yè)目標,設計人工裝卸搬運助力裝置驅(qū)動力,結(jié)合結(jié)構(gòu)布局和系統(tǒng)設計重量要求合理選擇動力源和傳動方式。常見的驅(qū)動方式有關節(jié)直接電機驅(qū)動、液壓驅(qū)動連接桿、氣動驅(qū)動連接桿、氣動肌肉四種。
5.設計上肢助力裝置機械結(jié)構(gòu)

圖6 人工裝卸搬運助力裝置基本控制結(jié)構(gòu)
主要工作包括:機械結(jié)構(gòu)和關節(jié)運動副的優(yōu)化設計,驅(qū)動器件和傳感器的合理布局,運動自由度的分配和冗余自由度選擇,材料的選擇,支撐與身體防護的優(yōu)化設計等。設計中要充分體現(xiàn)仿生學和人機工效學的思想,盡量模擬真實人體肢體機能,穿戴舒適,操作靈活,最大限度地提高助力裝置對物資裝卸搬運的作業(yè)能力和效率。人工裝卸搬運助力裝置中上肢助力機械結(jié)構(gòu)有兩種方案,第一種方案采用懸吊方式(圖7),手臂只是控制方向和穩(wěn)定作用,不承擔負載重量。通過末端執(zhí)行器中傳感器的作用將信息傳到微型處理器中,重物的載荷等于人力與驅(qū)動器產(chǎn)生的總力,將力轉(zhuǎn)移到助力裝置上,最后轉(zhuǎn)移到地面上。美軍的HULC上肢助力采用此方式。助力動作較從前的懸吊式上肢助力裝置更加敏捷有力。

圖7 懸吊式上肢助力裝置原理
第二種方案采用美國雷神公司的XOS2的上肢機械助力結(jié)構(gòu)(圖8),主要有機械骨架、傳感器、傳動裝置以及控制器構(gòu)成,由液壓驅(qū)動。“XOS2”的上肢

圖8 液壓驅(qū)動上肢助力結(jié)構(gòu)
6.搭建控制系統(tǒng)
人工裝卸搬運助力裝置控制系統(tǒng)由末端傳感器、信號處理與分析、中央控制器、驅(qū)動系統(tǒng)、信號反饋系統(tǒng)、環(huán)境監(jiān)測系統(tǒng)及電源管理系統(tǒng)等組成。如何快速檢測人體動作信號并正確判斷,同步或減小助力裝置和穿戴者之間的動作誤差,提高電源的利用效率等問題是控制系統(tǒng)所需攻克的難點。另外,助力裝置控制程序還須具有自學習能力,可以學習不同穿戴者的步態(tài)并原樣再現(xiàn),以便匹配不同穿戴者的步態(tài)特征,這樣不僅可以提高助力裝置和穿戴者之間的同步性,還可以增加穿戴者的舒適性。
四、應用前景
人工裝卸搬運助力裝置不僅能達到負重行走的目的,還具備執(zhí)行裝卸搬運等重體力工作的能力。美國、日本、俄羅斯等國將人工裝卸搬運助力裝置視為人的靈活性、機動性、智慧性與機器強壯性的有機結(jié)合,是最具發(fā)展前景和應用前景的人工助力系統(tǒng)。
在民用領域,應用該技術可以作為肢體傷殘患者的一種智能、舒適、敏捷、高效的康復工具;可以為在狹小倉儲場所搬運物料,從事重體力重復工作的工人提供一種省力、高效、快捷的搬運工具,并能大大提高作業(yè)效率,減輕勞動強度;該技術還可成為戶外運動愛好者的必備工具,可使他們背負更多的給養(yǎng)或裝備,大大拓展活動范圍。
在軍事領域,應用人工裝卸搬運助力裝置,可為現(xiàn)代高技術局部戰(zhàn)爭的高機動性、高強度的后勤物資收發(fā)、補給方式提供一種實用型強、效率高的現(xiàn)代后勤單兵裝卸搬運工具。
作者單位:(軍事交通學院)
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
科學大眾(2021年9期)2021-07-16 07:02:40
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
金橋(2020年9期)2020-10-27 01:59:44
中學生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
中國生殖健康(2019年3期)2019-02-01 06:12:26
商周刊(2017年17期)2017-09-08 13:08:58
中國衛(wèi)生(2016年2期)2016-11-12 13:22:18
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
