基于圓柱筒支撐緊縮場極坐標測試掃描系統的研制
2014-04-13 09:30:18曹鐵澤孫安斌王繼虎
計測技術 2014年4期
曹鐵澤,孫安斌,王繼虎
(中航工業北京長城計量測試技術研究所,北京100095)
0 引言
緊縮場是緊縮平面場的簡稱,其英文名稱為CATR(Compact Antenna Test Range),它能夠將點源產生的球面波在近距離內變換成為平面波,從而可以在近距離上提供一個性能優良的平面微波測試區。對緊縮場性能鑒定有多種方法,國際上最通用的方法是探頭掃描法,即用標準探頭直接對緊縮場測試區準平面波場的幅度和相位進行測試評估[1]。緊縮場測試掃描架(以下簡稱:緊縮場掃描架)用于安裝測試用探頭天線,保證探頭天線在測試區域內移動時探頭天線口面處于同一個平面上。因此,緊縮場掃描架是緊縮場最終性能指標檢測和評定的重要設備[2]。
目前緊縮場掃描架的主要結構有兩種,分別是直角坐標掃描架和極坐標掃描架,其中直角坐標掃描架主要用于小型緊縮場的性能檢測,而極坐標掃描架則用于大型緊縮場的性能測試。通常極坐標掃描架以塔式結構為主,為了保證其直線度或平面度,所設計的結構復雜、笨重、不易安裝。隨著緊縮場技術的發展,緊縮場靜區的尺寸和頻率都在不斷增大和提高,如艾斯特里厄姆航天公司(EADS Astrium)為開展衛星的RCS 測量工作,建立了 CCR20/17,CCR75/60 和CCR120/100 三種型號的卡賽格侖補償式緊縮場,其靜區直徑的大小分別為1.3,5,8 m,最高工作頻率分別為400,200,100 GHz[3-4],這就要求所對應的測試掃描架的平面度(在行波方向的偏移量)分別為0.008 mm(RMS),0.015 mm(RMS)和0.03 mm(RMS)。目前國內用于飛機性能測試的緊縮場其最高工作頻率要求已經達到75 GHz,為了滿足該類緊縮場性能測試的要求,本文設計了一種帶自動補償的高精度圓柱筒支撐結構緊縮場掃描架,該掃描架克服了純機械裝置其精度難保證的缺點,同時滿足了緊縮場靜區質量快速檢測、掃描架結構簡單且安裝方便等要求。
1 結構設計
1.1 設計要求
圓柱支撐掃描架是為了滿足多種緊縮場靜區快速檢測需要而設計的極坐標掃描架。設計的目標是滿足靜區范圍在3.5 m×3.5 m 內、靜區高度在5 ~8 m 之間、最高工作頻率為75 GHz、相位不平度不大于6°的緊縮場檢測的需要。
掃描架技術要求:掃描架一次性掃描范圍為3.5 m×3.5 m,掃描架掃描中心最高高度為8 m,掃描架掃描的平面度的實時測量誤差為0.04 mm。
1.2 總體結構設計
圓柱筒支撐結構極坐標掃描架總體結構如圖1所示,掃描架的主要組成部件有:底座部件,固定支撐部件,斜拉部件,轉接支撐部件,自動轉向機構,掃描部件,平面度補償機構等。為方便描述,建立全局坐標系,正對來波方向為X 軸正向,豎直向上方向為Z 軸正向,建立右手坐標系如圖1所示。
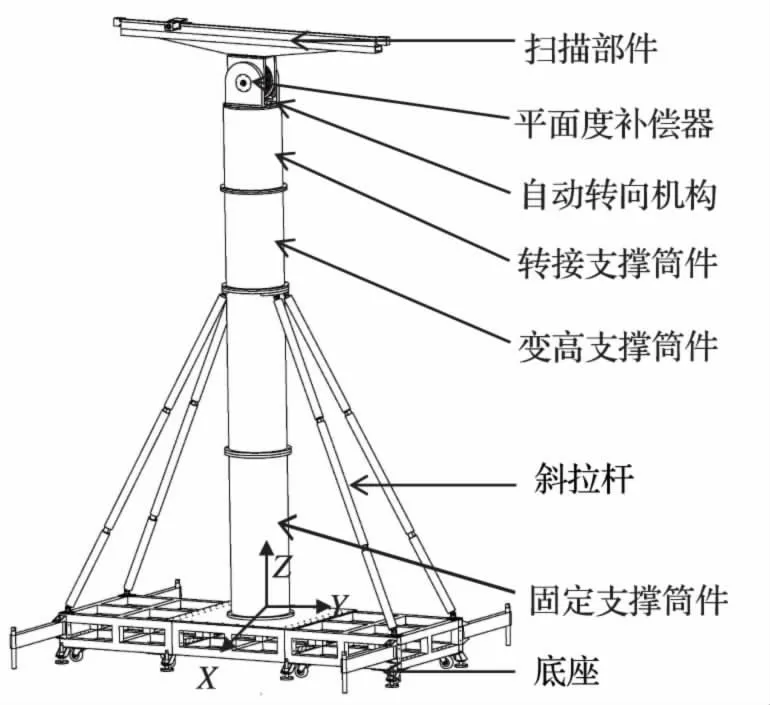
圖1 圓柱筒支撐極坐標掃描架結構圖
掃描架結構具體特點如下:掃描部件導軌采用硬鋁型材導軌作為掃描探頭滑臺的驅動定位部件,通過導軌直線度調整塊來保證導軌的整體直線度優于0.10 mm,導軌在行波方向對稱放置,驅動電機采用導軌下側放置形式,以實現重心在行波方向前后對稱,導軌有效行程3.5 mm。導軌支撐桁架采用硬鋁材料焊接而成,外面支撐板法線與行波方向成155°,以防止電磁波沿原路返回。
主支撐部件和結構采用圓柱支撐方式,以此來簡化結構并通過粘結吸波材料減少掃描架自身的RCS(雷達散射截面面積)值。主支撐結構具有7 m 以上高度,在支撐結構頂端不可避免地會有較大的撓度,為減少撓度本文采用了斜拉桿并施加預應力方式來增加結構的整體剛度。轉接部件是為適應不同高度緊縮場靜區檢測需要而配做的圓柱支撐筒。底座部件是支撐掃描架整體結構的基礎,具備水平調整和方位調整功能,底部部件主體結構由方鋼焊接而成,最終通過三塊拼接而成,側面設計有可折疊支架以增加其支撐范圍。
1.3 轉向機構設計
自動轉向機構是實現掃描架水平工作狀態與豎直工作狀態之間自動轉換以及保證轉向后掃描架探頭平面度的關鍵機構。其結構如圖2所示,該轉向機構將蝸輪固定在轉向部件中間支撐筒上,支撐筒與掃描架支撐架通過螺栓連接。驅動電機及蝸桿安裝在底座上,電機驅動蝸桿轉動就可驅動掃描架部件轉動。該結構通過鎖緊前后螺母施加預載荷將角接觸軸壓緊來保證其無間隙運行。在蝸輪副中采用雙螺距漸厚蝸桿傳動、在軸承安裝套上安裝調整套使得蝸桿能夠在蝸桿軸向調整,以消除蝸輪副的吻合間隙。
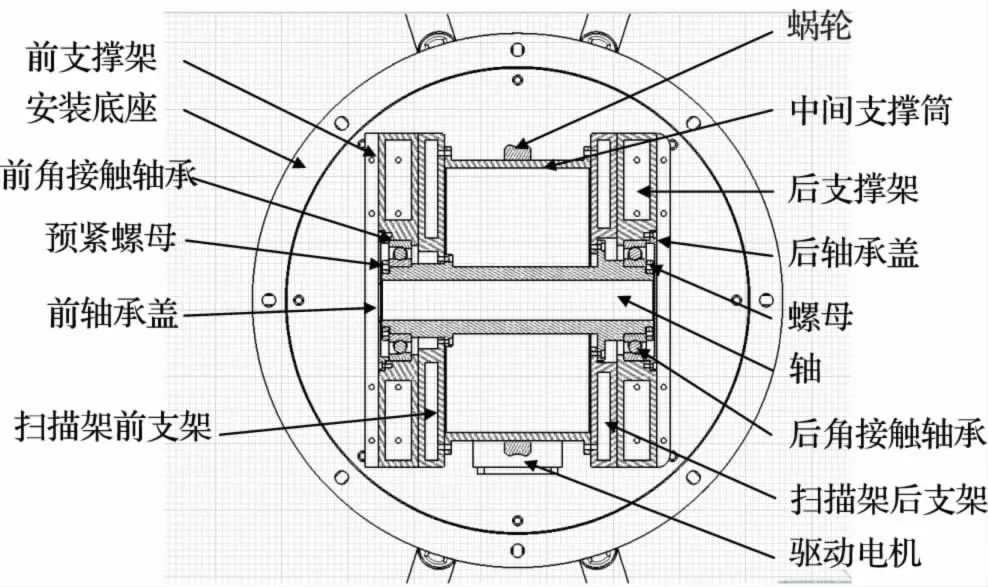
圖2 轉向機構結構圖
1.4 掃描架機械誤差分析[5-8]
按照1.2 所設計的掃描架在無補償的情況下引入的平面度誤差包括:轉動機構引入的軸系偏擺誤差、載荷偏心引入的形變誤差、導軌直線度誤差。其中由轉動機構引入的軸系偏擺誤差是以下幾項誤差的合成:
1)前角接觸軸承徑向偏擺誤差μ1
設軸承徑向跳動為0.005 mm,前后軸承的跨度l1=360 mm,則該項誤差為
μ1=0.005/l1=1.39×10-5rad=2.86″
1rad=2.06×105(″)
2)后角接觸軸承徑向偏擺誤差μ2
設軸承徑向跳動為0.005 mm,前后軸承的跨度l1=360 mm,則該項誤差為
μ2=0.005×2.06×10/l1=2.86″
3)轉軸角接觸軸承安裝處同軸度誤差μ3
設安裝位置偏差為0.02 mm,前后軸承的跨度l1=360 mm,該項引起的誤差為
μ3=0.02×2.06×105/l1=11.44″
4)前后軸承安裝座軸承安裝孔中心對安裝連接面的不平行度μ4
設安裝孔中心位置偏差0.02 mm,前后軸承的跨度l1=360 mm,該項引起的誤差為
μ4=0.02×2.06×105/l1=11.44″
則轉動機構軸系引入的總偏擺誤差為

若轉軸中心到探頭喇叭在導軌兩端時的距離l2=1800 mm,該項偏擺引起探頭喇叭在導軌兩端的最大偏移量為
u1=δ× l2/2.06×105=0.15 mm
載荷偏心引入的形變誤差是指掃描部件在喇叭探頭天線及電機偏心載荷作用下,會引起探頭喇叭在行波方向的偏移量,經有限元計算分析,其在豎直工作狀態下引起行波方向最大偏移量為
u2=0.02 mm
導軌直線度誤差是指導軌本體的直線度,采用硬鋁型材導軌作為掃描探頭滑臺的驅動定位部件,通過導軌直線度調整塊可保證導軌的整體直線度優于0.10 mm,即
u3=0.10 mm
綜合以上誤差,引起探頭在行波方向的最大偏移量為
u=u1+ u2+ u3=0.27 mm
上述分析表明,在不作補償的情況下,掃描架平面度的偏差最大可達到0.27 mm,遠不能滿足緊縮場靜區檢測要求。
2 緊縮場掃描架平面度補償
由以上分析可知,受到機械變形及裝配加工精度的限制,緊縮場掃描面上探頭的平面度不能滿足測試要求,直接影響測量的幅相精度。一種有效的解決方案是,在保證一定機械精度的前提下,利用先進的激光測量技術測得探頭的實際空間位置,通過軟件補償的方法對此位置誤差進行補償以修正其相位[9-11]。
平面度補償器主要由旋轉激光頭和一維位置敏感探測器(PSD)組成,如圖3所示。激光發射器固定在自動旋轉的平臺上,PSD 安裝在被測物上。當激光頭以一定的速度旋轉時,激光器發出的激光能夠掃出一個理論上的平面。激光照射在PSD 上時,PSD 便能感知到激光在PSD 上的位置,PSD 上下(如圖3 箭頭方向)移動后其感應值與之前感應值會產生一定的差值,此值通過電壓或電流形式表現出來,經過標定,其位置移動的大小便可求出。旋轉激光頭固定安裝,PSD 安裝位置的變化即可測得。該平面度補償器的指標如下:旋轉激光器測量誤差為0.012 mm/m,轉速為0.5 ~10 r/s;PSD 測量誤差為±0.01mm,工作范圍為0.5 ~1.8 m。
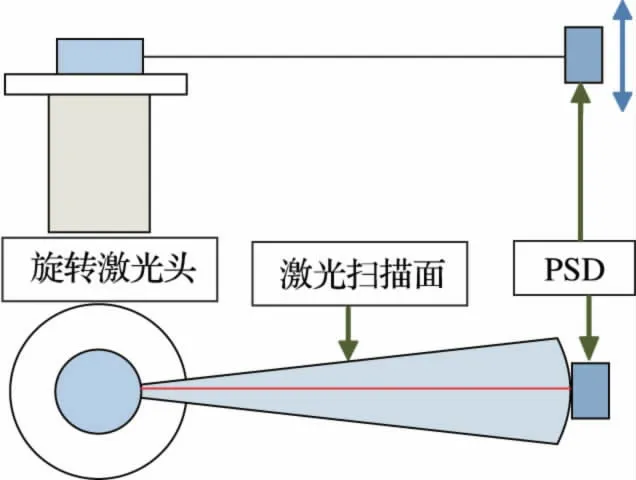
圖3 自動補償器原理圖
使用時將旋轉激光器安裝在前支撐架端面上且與掃描架轉軸同軸的位置,轉軸是中空的,旋轉激光器可在軸向方向調整;PSD 安裝在接收天線喇叭安裝座的下端面上;調整PSD 與旋轉激光器的位置,使得旋轉激光器發出的激光接近PSD 中點位置區域;滑臺的位置由步進電機控制驅動絲杠轉動的圈數控制,導軌重復性定位誤差為±0.02 mm,故滑臺位置可通過控制電機的脈沖數量來確定;滑臺每移動一段距離便停下等待喇叭天線接收電磁波數據,與此同時采集PSD 上的數據,之后再繼續移動,重復以上過程完成一個工作狀態的測試。在水平位置測試完成后進行豎直狀態下測試,激光器安裝位置相對運動極小可忽略不計,平面度補償器測量的平面度值即為掃描架平面度的修正值。該平面度補償器在1.8 m 位置測量平面度的誤差為0.032 mm,滿足了設計要求。
3 靜區測試
本試驗采用單反射面緊縮場,緊縮場靜區大小為2.7 m×2.7 m,工作頻率范圍為1 ~40 GHz。采用AgilentN5244A 一體化矢量網絡矢量分析儀作為電磁波發射接收及數據處理測量設備。以一個典型的測試數據為例,該組數據是在17 GHz 水平極化下測得的,未作平面度補償所得到的相位如圖4所示,由于相位誤差較大,所得到的測試結果無法對緊縮場進行評定。將相位的變化曲線(見圖4 中實線)與導軌水平放置時導軌探頭在行波方向的偏移量曲線(見圖5)進行比較,可以看出兩者的變化趨勢一致,當探頭位置偏移量大時,則相位誤差也變大。圖4 中,虛線為(理論)相位曲線。
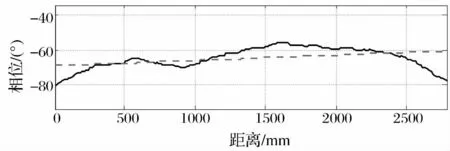
圖4 豎直狀態水平極化未補償的相位數據
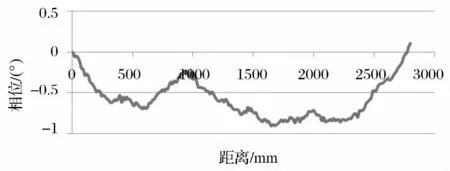
圖5 導軌探頭在行波(X 軸)方向的偏移量
將通過平面度補償器測得掃描架探頭在行波方向上的偏移量轉換到對應波長的相位,并補償到微波矢量分析儀中,便獲得了靜區補償后的相位數據(見圖6),可以看出相位誤差明顯減小。由此引入的相位測量誤差不會影響對緊縮場性能進行評定。
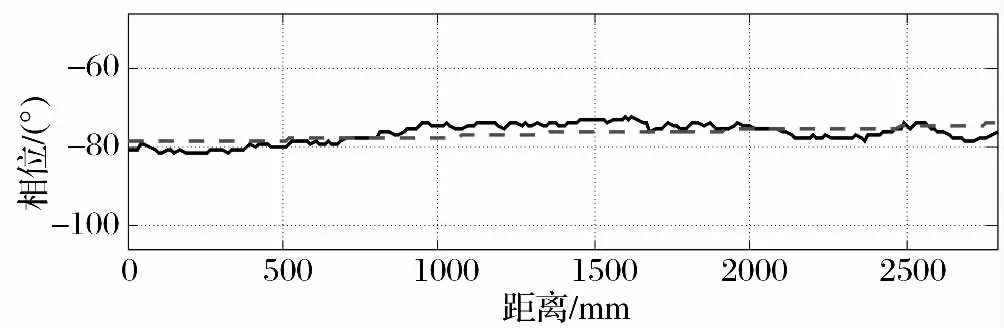
圖6 豎直狀態水平極化補償后的相位圖
通過本試驗,驗證了掃描架采用補償方法的可行性,說明掃描架探頭機械位置的平面度可適度放寬,利用先進的探測手段測得其平面度便可以進行相應補償,從而滿足緊縮場靜區檢測的需要。
4 結語
高精度緊縮場掃描架主要體現在微波接收頭運動平面具有較高的平面度。本掃描架采用筒式支撐加斜拉桿結構,即簡化了結構又減輕了重量,掃描頭類采用極坐標結構,并采用平面度自動補償器實時測量接收頭原始位置的平面度,根據被測波段的頻率對相位進行補償修正。測試結果表明掃描架探頭位置平面度檢測誤差為0.032 mm,靜區測試結果表明,該掃描架能夠滿足最高頻率為75 GHz 緊縮場靜區的檢測要求。
[1]全紹輝,何國瑜,徐永斌,等.大型緊縮場電氣性能檢測[J].微波學報,2003,19(2):77-80.
[2]何國瑜,盧才成,洪家才,等.電磁散射的計算和測量[M].北京:北京航空航天大學出版社,2006.
[3]Hartmann J,Habersack J,Steiner H-J.Antenna Measurement in Compact Ranges[M].Ahmedabad,India:ISIO,2002.
[4]John Demas,Terrance Speicher.Innovative Mechanical Designs for Scanners[C]// Antenna Measurement Techniques Association(AMTA)symposium.Carson,USA:AMTA,1996.
[5]張厚江,樊銳,陳五一.高精度緊縮場掃描架的研制[J].機械設計與制造,2005(9):111-113.
[6]胡春華,樊銳,陳五一.緊縮平面場掃描架系統研制[J].北京航空航天大學學報,2002(1):122-124.
[7]焦洪杰,張以都,黎定仕.大型緊縮場掃描架旋臂結構及動態性能分析[J].北京工商大學學報,2007,25(6):19-22.
[8]焦洪杰,陳五一,王春潔.大型緊縮場測試掃描架誤差分析探討[J].北京工商大學學報,2006,24(6):18-21.
[9]王秀春.天線近場測量系統的控制設計綜述[J].現代雷達,2004,26(10):48-51.
[10]NSI.Near-Field System Inc Technical Papers[Z].2007.
[11]王秀春.激光測量技術在天線近場系統中的應用[J].現代雷達,2003,25(7):36-39.