主動(dòng)式鉆柱升沉補(bǔ)償系統(tǒng)模擬實(shí)驗(yàn)及仿真
2014-04-26 08:23:34張萌李相遠(yuǎn)朱顯宇
機(jī)床與液壓 2014年21期
張萌,李相遠(yuǎn),朱顯宇
(中國(guó)地質(zhì)大學(xué)(武漢)機(jī)械與電子信息學(xué)院,湖北武漢 430074)
0 前言
海洋鉆探船在作業(yè)時(shí)處于漂浮狀態(tài),船體會(huì)隨著海浪起伏做升沉運(yùn)動(dòng),從而使鉆桿產(chǎn)生往復(fù)運(yùn)動(dòng)引起井底鉆壓變化。作為鉆井設(shè)備的關(guān)鍵組成部分,鉆柱升沉補(bǔ)償系統(tǒng)的主要作用是減小船體升沉對(duì)鉆柱的影響,使鉆壓穩(wěn)定在一定范圍內(nèi),以提高鉆進(jìn)效率,降低鉆井成本,保障人員及設(shè)備安全[1]。鉆柱升沉補(bǔ)償系統(tǒng)主要有被動(dòng)式、主動(dòng)式和半主動(dòng)式3種形式[2],目前國(guó)外已有不少?gòu)S商生產(chǎn)出了比較成熟的產(chǎn)品,其中,IHC公司和力士樂公司聯(lián)合開發(fā)的升沉補(bǔ)償系統(tǒng)結(jié)合了主動(dòng)式與被動(dòng)式升沉補(bǔ)償系統(tǒng)的優(yōu)點(diǎn),補(bǔ)償效果可以達(dá)到90%以上[3-5]。比較之下,我國(guó)對(duì)升沉補(bǔ)償系統(tǒng)尤其是主動(dòng)式及半主動(dòng)式升沉補(bǔ)償系統(tǒng)的研究還有差距。作者根據(jù)主動(dòng)式鉆柱升沉補(bǔ)償系統(tǒng)的工作原理,設(shè)計(jì)并搭建了其室內(nèi)模擬實(shí)驗(yàn)臺(tái),利用AMESim軟件進(jìn)行了仿真分析,并與實(shí)驗(yàn)結(jié)果進(jìn)行了比較,為主動(dòng)式鉆柱升沉補(bǔ)償系統(tǒng)的設(shè)計(jì)提供參考。
1 主動(dòng)式鉆柱升沉補(bǔ)償系統(tǒng)原理
圖1為主動(dòng)式鉆柱升沉補(bǔ)償系統(tǒng)原理簡(jiǎn)圖[6],該系統(tǒng)為閉環(huán)控制系統(tǒng)。圖中,補(bǔ)償缸的缸體通過游動(dòng)滑車與塔架相連,進(jìn)而與船體連接,補(bǔ)償缸的活塞桿通過大鉤、動(dòng)力頭等與鉆柱連接,傳感器可以把檢測(cè)到的船體和鉆柱的位移信息送到控制器,其偏差信號(hào)經(jīng)過處理又作為伺服閥的控制信號(hào)以控制油液的流向和流量,實(shí)現(xiàn)補(bǔ)償缸活塞桿的補(bǔ)償動(dòng)作:船體和補(bǔ)償缸缸體隨著海浪升沉?xí)r,補(bǔ)償缸的活塞桿盡量保持其原位不動(dòng)。

圖1 主動(dòng)式鉆柱升沉補(bǔ)償系統(tǒng)簡(jiǎn)圖
2 主動(dòng)式升沉補(bǔ)償系統(tǒng)室內(nèi)實(shí)驗(yàn)臺(tái)
主動(dòng)式鉆柱升沉補(bǔ)償系統(tǒng)室內(nèi)模擬實(shí)驗(yàn)臺(tái)的工作原理和實(shí)物圖分別如圖2和圖3所示,其中,液壓缸8的運(yùn)動(dòng)及動(dòng)作即為補(bǔ)償系統(tǒng)中補(bǔ)償缸的模擬;液壓缸所接負(fù)載的大小可以通過改變實(shí)物圖中所示機(jī)構(gòu)的傾角調(diào)節(jié);滾珠絲杠副4通過聯(lián)軸器2由伺服電機(jī)1驅(qū)動(dòng),工作臺(tái)9的動(dòng)作則為船體升沉運(yùn)動(dòng)的模擬。液壓缸的缸體與工作臺(tái)連接在一起,以保證兩者的運(yùn)動(dòng)狀態(tài)一致,拉桿式直線位移傳感器3和5的拉桿通過連接板分別接到工作臺(tái)和液壓缸的活塞桿上,以分別獲得工作臺(tái)(即液壓缸缸體)和液壓缸活塞桿的絕對(duì)位移量。
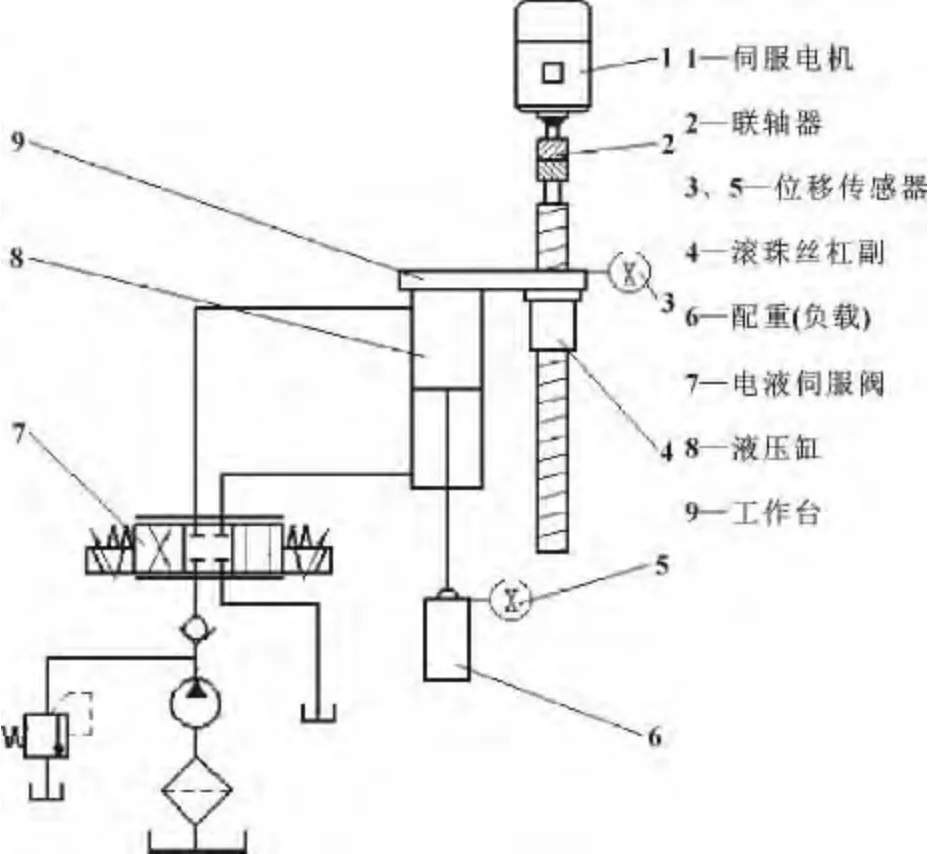
圖2 補(bǔ)償系統(tǒng)室內(nèi)模擬實(shí)驗(yàn)臺(tái)簡(jiǎn)圖
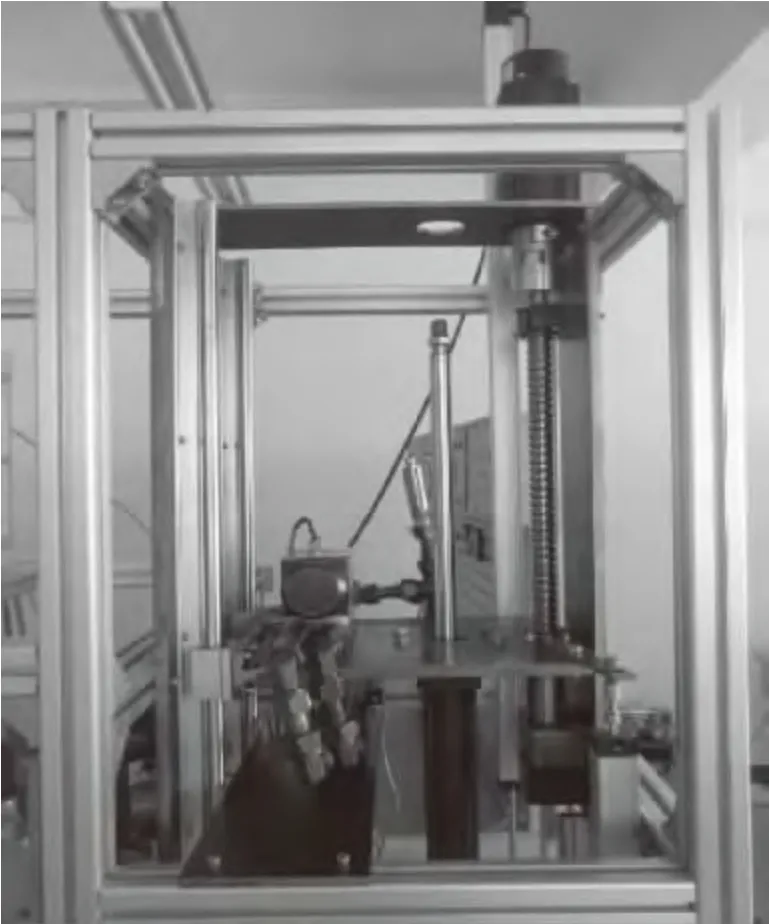
圖3 實(shí)驗(yàn)臺(tái)實(shí)物圖
3 仿真與實(shí)驗(yàn)
3.1 AMESim建模與仿真
首先在草圖模式下建立系統(tǒng)的仿真模型。主動(dòng)式升沉補(bǔ)償室內(nèi)實(shí)驗(yàn)系統(tǒng)的AMESim仿真模型如圖4所示。
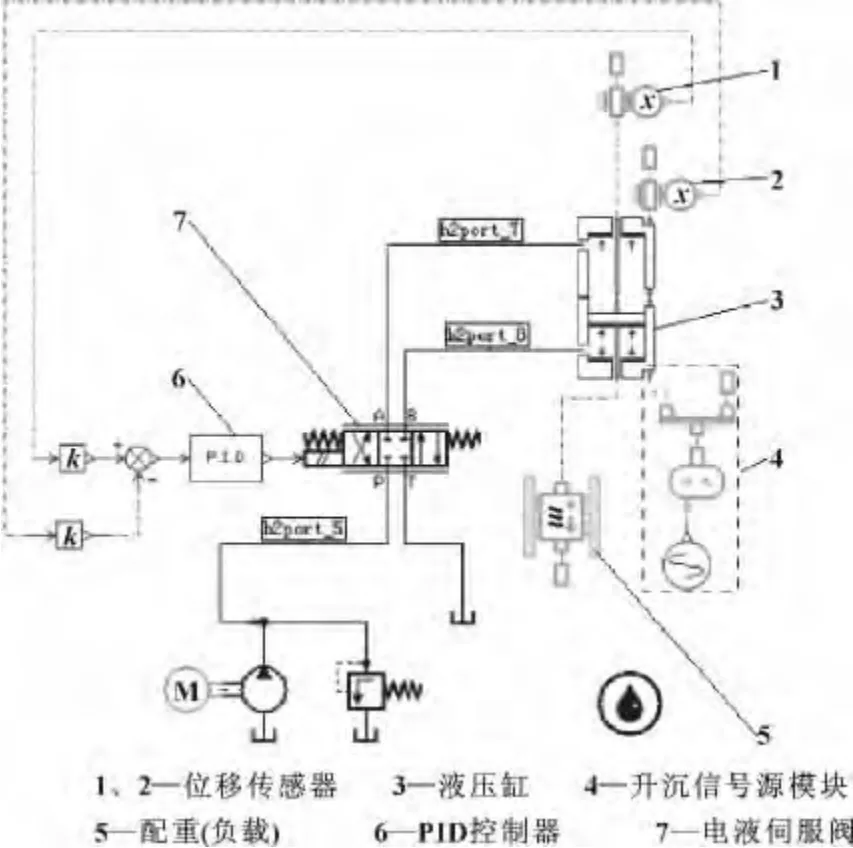
圖4 AMESim仿真模型
在該系統(tǒng)中控制器采用的是設(shè)置簡(jiǎn)單、在工業(yè)控制領(lǐng)域使用廣泛的PID控制器[7]。選取HCD庫(kù)中brp4和brp2兩種元件組成一個(gè)缸體可以移動(dòng)的液壓缸。為了能更簡(jiǎn)單地觀測(cè)到系統(tǒng)各參數(shù)的設(shè)置對(duì)補(bǔ)償效果的影響,在文中沒有專門建立伺服電機(jī)和滾珠絲杠副的仿真模型,而是用圖4中升沉信號(hào)源模塊4直接連到液壓缸的缸體上,使液壓缸缸體產(chǎn)生周期性的正弦運(yùn)動(dòng)。位移傳感器1和2分別采集到液壓缸活塞桿和缸體的位移信息送到PID控制器,經(jīng)過PID調(diào)節(jié)后的信號(hào)作為電液伺服閥的控制信號(hào)控制電液伺服閥的動(dòng)作。
在子模型模式下,需要根據(jù)實(shí)際情況為每個(gè)元件和連線分配一個(gè)合適的子模型。為了簡(jiǎn)化設(shè)置步驟,可以先單擊首選子模型按鈕給所有元件和連線指派最簡(jiǎn)單的可能子模型,然后在此基礎(chǔ)上根據(jù)實(shí)際情況進(jìn)行修改。在該系統(tǒng)中,在單擊首選子模型后,需要把伺服閥和補(bǔ)償缸之間的連接管道設(shè)置為考慮油液可壓縮性和阻尼的子模型HL03,以及把連接伺服閥進(jìn)油口P和液壓節(jié)點(diǎn)的管道設(shè)置為僅考慮油液可壓縮性的子模型HL000。
在參數(shù)設(shè)置模式下可以設(shè)置仿真模型中各元件的參數(shù)以及指定批運(yùn)行[8]。元件參數(shù)的設(shè)置應(yīng)盡可能與實(shí)際情況一致,參數(shù)設(shè)置的準(zhǔn)確與否直接決定著仿真結(jié)果的可靠性。根據(jù)圖3中的實(shí)驗(yàn)臺(tái)設(shè)置參數(shù)如下:液壓缸活塞直徑D為40 mm,活塞桿直徑d為22 mm;通過鋼絲繩及滑輪組與液壓缸活塞桿相連的配重質(zhì)量m為80 kg,inclination為90°,同實(shí)驗(yàn)臺(tái)類似,AMESim參數(shù)設(shè)置中可以通過改變inclination的值來調(diào)節(jié)活塞桿的負(fù)載力大小;滾珠絲杠的最大行程為300 mm,螺母的最大設(shè)計(jì)速度vmax為0.33 m/s,電動(dòng)機(jī)轉(zhuǎn)速1 430 r/min,液壓泵排量16 mL/r,溢流閥開啟壓力2 MPa,正弦信號(hào)源頻率0.13;因?yàn)槲闹袝翰簧婕暗角梆伩刂疲瑢D4中位移傳感器2的增益設(shè)置為0,則PID控制器獲得的信號(hào)則為活塞桿位移與零點(diǎn)位移的差值。其他參數(shù)采取默認(rèn)值后,選取PID控制器中Proportional Gain、Integral Gain和Derivative Gain作為批運(yùn)行參數(shù),以直觀地觀測(cè)這3個(gè)參數(shù)的取值對(duì)補(bǔ)償效果的影響。
進(jìn)入仿真模式,設(shè)置仿真運(yùn)行時(shí)間為30 s,選擇批處理方式運(yùn)行仿真,比較后選取補(bǔ)償效果較好的一組PID參數(shù)為:Proportional Gain為10,Integral Gain為2,Derivative Gain為0.2。液壓缸缸體和活塞桿的位移仿真結(jié)果曲線如圖5所示。
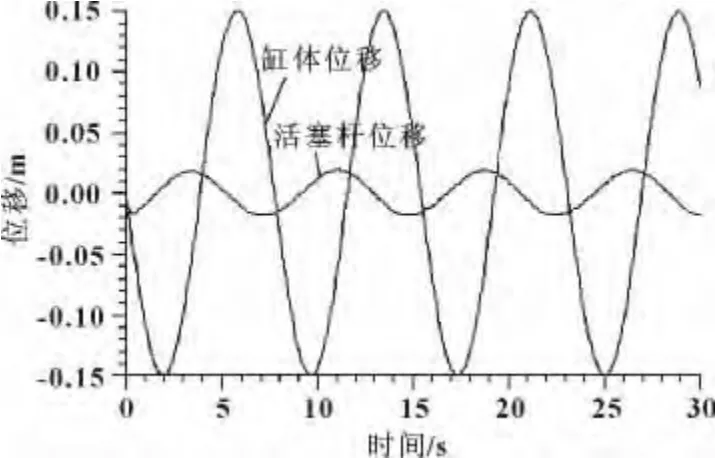
圖5 位移仿真曲線
由仿真結(jié)果可以看出,主動(dòng)式鉆柱升沉補(bǔ)償系統(tǒng)采用PID控制可以取得較好的補(bǔ)償效果,當(dāng)液壓缸的缸體做振幅為±150 mm、周期為7.7 s的正弦運(yùn)動(dòng)時(shí),活塞桿的最大波動(dòng)范圍僅為±18.7 mm,補(bǔ)償效果可以達(dá)到87.5%。
3.2 模擬實(shí)驗(yàn)
利用Matlab/Simulink在主機(jī)上搭建xPC Target實(shí)時(shí)控制系統(tǒng),把Simulink程序編譯成C代碼,通過網(wǎng)線或者串口下載到輔機(jī)上,執(zhí)行輔機(jī)上的控制程序進(jìn)行信號(hào)處理、數(shù)據(jù)采集并把采集到的數(shù)據(jù)傳輸回主機(jī),控制程序如圖6所示。其中輔機(jī)上的PCI-6221/37數(shù)據(jù)采集卡模擬輸入1號(hào)口采集的工作臺(tái)位移信號(hào)經(jīng)Gain模塊放大,轉(zhuǎn)換成工作臺(tái)實(shí)際位移,經(jīng)Analog Filter Design數(shù)字濾波器模塊進(jìn)行低通濾波,濾波后的實(shí)際位移信號(hào)通過Target Scope模塊顯示在輔機(jī)顯示器上。數(shù)據(jù)采集卡模擬輸入2號(hào)口采集的活塞桿位移信號(hào)經(jīng)Gain模塊放大,轉(zhuǎn)換成活塞桿實(shí)際位移,再經(jīng)Analog Filter Design數(shù)字濾波器模塊進(jìn)行低通濾波,濾波后的實(shí)際位移信號(hào)與設(shè)定位移零點(diǎn)進(jìn)行對(duì)比,通過Target Scope模塊顯示在輔機(jī)顯示器上。實(shí)際與位移設(shè)定位移零點(diǎn)相減獲得活塞桿位移偏差,經(jīng)過Discrete PID Controller離散PID控制器調(diào)節(jié)后,轉(zhuǎn)換成實(shí)際伺服閥控制電壓信號(hào)數(shù)值,輸入到數(shù)據(jù)采集卡模擬輸出1號(hào)口,控制伺服閥的動(dòng)作。
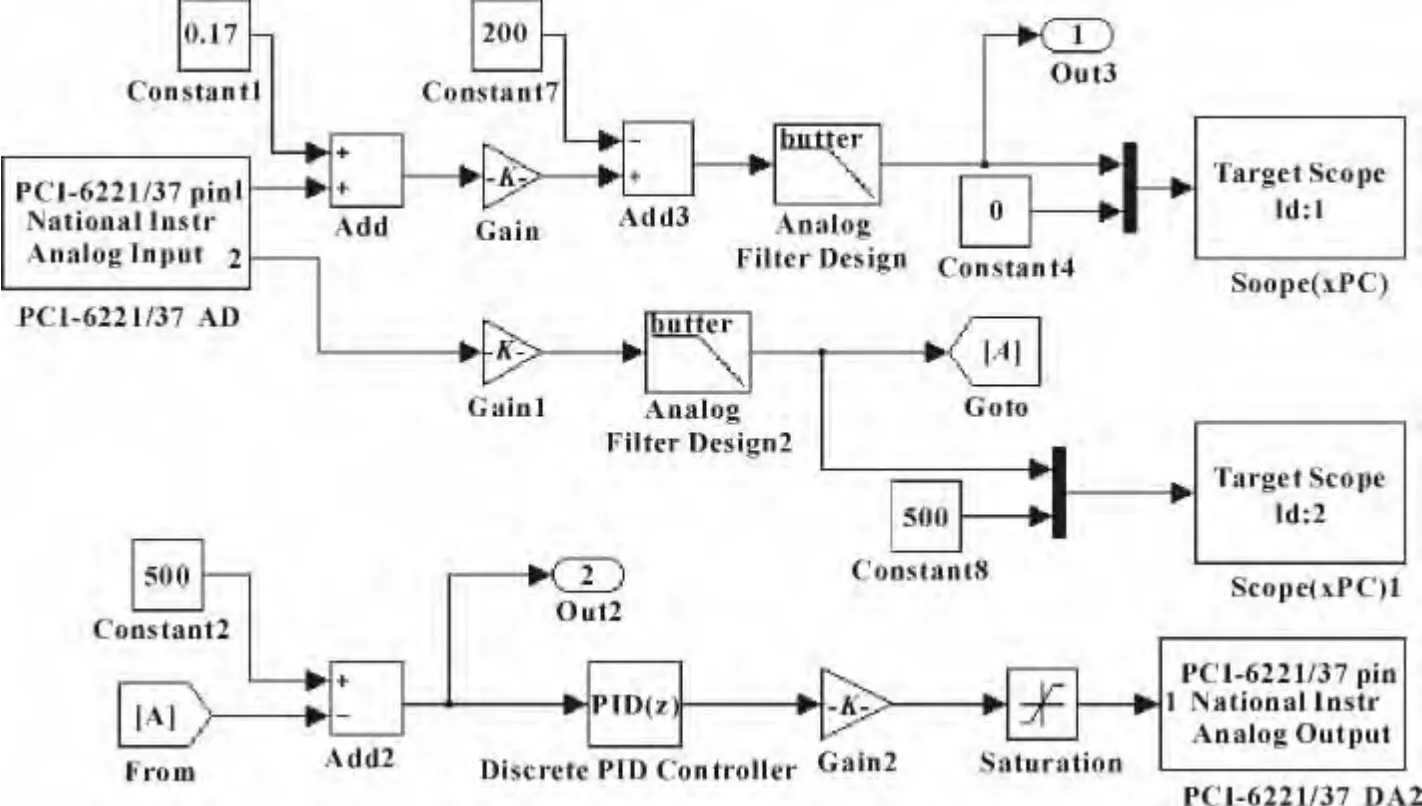
圖6 Simulink控制程序
設(shè)置PID參數(shù)和AMESim仿真中參數(shù)一致,進(jìn)行實(shí)驗(yàn),得到如圖7所示的實(shí)驗(yàn)結(jié)果曲線。
可以看出,同一組PID參數(shù)下的實(shí)驗(yàn)結(jié)果和仿真結(jié)果具有較好的一致性,當(dāng)液壓缸的缸體做振幅為±150 mm、周期為7.7 s的正弦運(yùn)動(dòng)時(shí),活塞桿的波動(dòng)范圍為±22 mm,實(shí)驗(yàn)的補(bǔ)償效果為85.3%。但是在實(shí)驗(yàn)中,活塞桿會(huì)出現(xiàn)小幅度的震蕩,這是由于經(jīng)過Analog Filter Design數(shù)字濾波器濾波的信號(hào)仍然存在一定的干擾,導(dǎo)致電液伺服閥的閥芯動(dòng)作不夠平穩(wěn)造成的,接下來的實(shí)驗(yàn)中,還需要繼續(xù)優(yōu)化Analog Filter Design數(shù)字濾波器的參數(shù),以取得良好的濾波效果。
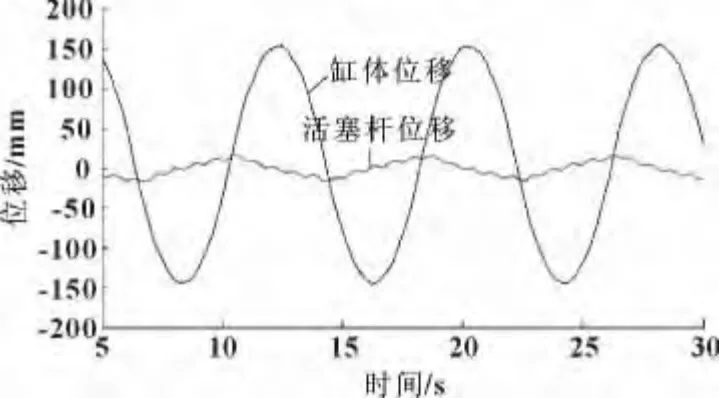
圖7 實(shí)驗(yàn)結(jié)果曲線
同時(shí)還可以看出,不管是仿真還是實(shí)驗(yàn),補(bǔ)償效果還有提高的空間,但僅僅通過調(diào)節(jié)PID參數(shù)是不夠的。在接下來的實(shí)驗(yàn)中,考慮引入前饋控制,采取前饋控制和PID控制相結(jié)合的控制策略,以提高系統(tǒng)的響應(yīng)速度。
4 結(jié)論
(1)AMESim作為一種多學(xué)科領(lǐng)域復(fù)雜系統(tǒng)建模仿真平臺(tái),可以直觀地建立液壓控制系統(tǒng)的模型、方便地進(jìn)行參數(shù)設(shè)置并仿真,其仿真結(jié)果與實(shí)驗(yàn)結(jié)果具有較高的一致性。AMESim軟件的應(yīng)用可以提高液壓控制系統(tǒng)的設(shè)計(jì)效率。
(2)利用xPC Target平臺(tái)搭建實(shí)時(shí)控制系統(tǒng)開發(fā)平臺(tái),可方便地調(diào)節(jié)PID參數(shù),達(dá)到所需要的控制效果。(3)通過仿真和實(shí)驗(yàn)可以發(fā)現(xiàn),采用PID控制的主動(dòng)式鉆柱升沉補(bǔ)償系統(tǒng)具有較高的補(bǔ)償性能。
[1]任克忍,沈大春,王定亞,等.海洋鉆井升沉補(bǔ)償系統(tǒng)技術(shù)分析[J].石油機(jī)械,2009,37(9):125-128.
[2]R.謝菲爾德.浮式鉆井設(shè)備及其使用[M].周邦杰,譯.北京:石油工業(yè)出版社,1988.
[3]ZIMMERMANN Charles A,GARNERO Charles L,MACK Ronald C.Tension Leg Riser System-An Effective Solution for Deepwater Risers[C].OMAE2001,Rio de Janeiro:A-merican Society of Mechanical Engineers,2001:537-545.
[4]ALBERSP.Motion Control in Offshore and Dredging[M].Springer,2010.
[5]DALMAIJER JW,KUIJPERSM R L.Heave Compensation System for Deep Water Installation[R].Marseille,F(xiàn)rance:Deep Offshore Technology(DOT),2003:1-20.
[6]李流軍.動(dòng)力吸振式深海采礦主動(dòng)升沉補(bǔ)償系統(tǒng)設(shè)計(jì)及控制研究[D].長(zhǎng)沙:中南大學(xué),2011.
[7]陳曉沖,王萬平.常規(guī)PID控制和模糊自適應(yīng)PID控制仿真研究[J].機(jī)床與液壓,2004(12):65-66.
[8]付永領(lǐng),祁曉野.LMSImagine.Lab AMESim系統(tǒng)建模和仿真參考手冊(cè)[M].北京:北京航空航天大學(xué)出版社,2011.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
