一種相貫線埋弧焊接機器人的結構優化設計
2014-11-26 09:28:04焦方坤汪蘇李曉輝
機床與液壓 2014年21期
焦方坤,汪蘇,李曉輝
(北京航空航天大學機械工程及自動化學院,北京100191)
0 前言
焊接機器人的運動學性能是其能否正常工作的保證,而動力學性能則直接影響到機器人的控制與穩定。因此如何使所設計的一種相貫線埋弧焊接機器人具有更好的運動學性能和動力學性能,是一個非常重要的問題。針對這一問題,從相貫線埋弧焊接機器人設計一開始就把機械結構和動力學性能進行同步考慮,使得相貫線埋弧焊接機器人的動力學性能從設計開始就作為機器人結構和驅動裝置優化設計的重要依據。
1 基于虛擬樣機技術的結構優化設計
基于虛擬樣機技術的結構設計是利用虛擬樣機技術,在進行機器人機械結構設計過程中同時考慮到機器人各零部件的形狀、尺寸、質量分布和安裝位置對機器人動力學性能的影響,在剛度強度設計的基礎上同時考慮機器人的動力學性能的優化。這種方法將機器人的動力學性能和結構優化設計同步貫穿于整個設計過程中,對每部分的設計都可以即刻仿真其工作性能,并根據仿真結果進行及時修改[1]。UG軟件基于參數化建模并能完成虛擬裝配,應用ADAMS軟件可以進行仿真分析,完成優化設計。虛擬裝配技術的一般流程如圖1(a)所示[2-3],優化設計流程如圖1(b)所示[4-5]。
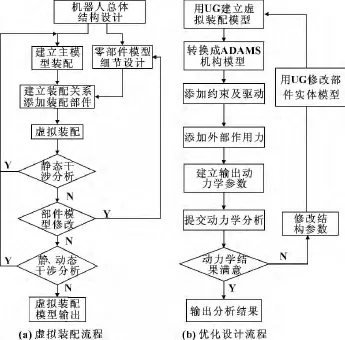
圖1 虛擬裝配和優化設計流程圖
2 相貫線埋弧焊接機器人結構優化設計
2.1 焊接機器人5號軸的設計分析
由于采用虛擬裝配和基于虛擬樣機技術的優化設計方法,因此需要采用自底向上的設計方法,即先設計相貫線埋弧焊接機器人的末端——埋弧焊接頭。由于時間原因和設計的要求,埋弧焊槍采用唐山松下公司生產的埋弧焊接頭。埋弧焊接頭不需要進行詳細設計,但是由于后面進行設計和優化過程需要用到焊接頭的模型,因此需要在UG中創建埋弧焊接頭的實體模型,如圖2所示。
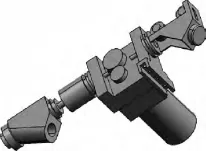
圖2 埋弧焊接頭模型
根據虛擬樣機技術,需要先通過UG建造出相貫線焊接機器人5號軸相關部分結構,并且需要和焊接頭進行裝配,圖3(a)所示為在UG中的5號軸模型圖。完成裝配后需要進行干涉檢查,確保沒有靜態干涉。5號軸裝配模型三維造型在UG中設計完成并進行虛擬裝配后輸出(export)*.xmt-_txt文件格式的Parasolide文件,在ADAMS/VIEW中利用Import命令將Parasolide文件載入,得到如圖3(b)所示的模型。導入到ADAMS中的模型在進行虛擬樣機的動力學仿真前需要添加運動副約束和驅動力,并進行動力學參數的設置。
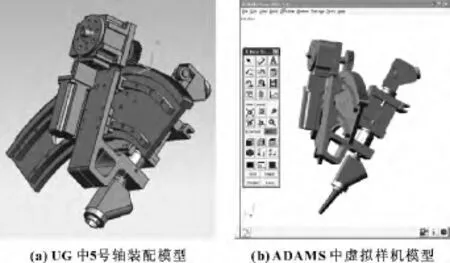
圖3 5號軸裝配模型
在機器人的5號軸的虛擬樣機設計完成后需要將其看做一個完整的樣機進行動力學的分析。如圖4所示為不同運動速度下,焊槍末端點處所受的力矩,角速度和角加速度曲線,從圖中可以看到在不同的運動速度下,焊槍端點的速度和加速度的變化都成一定的周期性,但是變化幅度很小,因此完全滿足焊接的需要[6-7]。
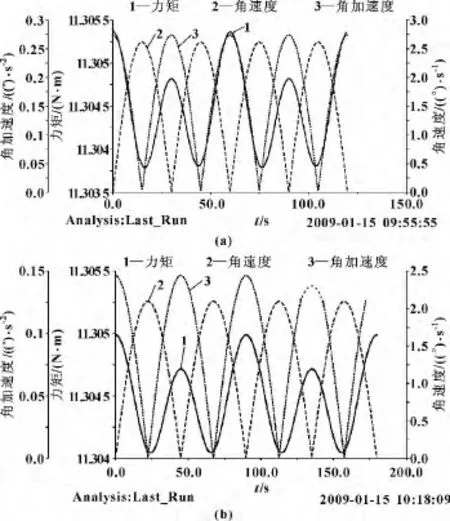
圖4 焊槍端點處的動力學仿真結果
機器人結構和動力學設計的另一個目的是為機器人的各個關節進行合理的驅動設計,文中采用的是自底向上的設計思想,因此在動力學仿真過程中可以分析出當前軸的驅動力矩,因此可以將機器人動力學分析中,電機驅動軸處的動力學特性作為旋轉機器人軸的驅動選取依據。如圖5所示為5號電機驅動軸在不同工作狀況下的動力學特性仿真結果。
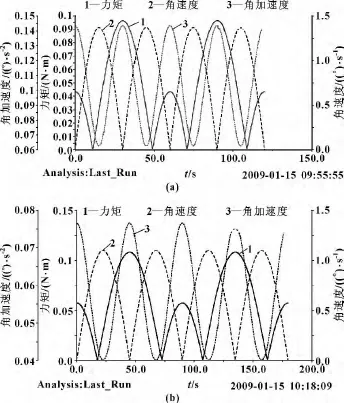
圖5 5號軸電機軸的動力學仿真結果
從圖5中可以看出電機驅動軸的最大驅動力矩為0.1~0.15 Nm。同時考慮到轉速和尺寸等其他方面的要求,這里選擇安川SGMAH-04A電機,該電機的扭矩轉速特性曲線如圖6所示[8]。

圖6 5號電機扭矩轉速特性曲線 (SGMAH-04A)
在設計方案時,5號軸的兩個同心圓弧導軌的圓心位于焊槍端點處,即5號軸運動是圍繞焊槍端點進行旋轉運動,因此從理論上來講該軸運動不應該引起焊槍端點位置的變化。在運用ADAMS進行動力學仿真過程中可以測量焊槍端點的位置變化,圖7所示為焊接端點在3個方向上的位置變化。從圖中可以看出在3個方向上都是運動到圓弧兩端時誤差較大,但是最大值只有0.449 mm,因此不會對工作過程產生很大影響。而且后面章節針對這個問題,也通過軟件方法對機器人進行了有效補償。
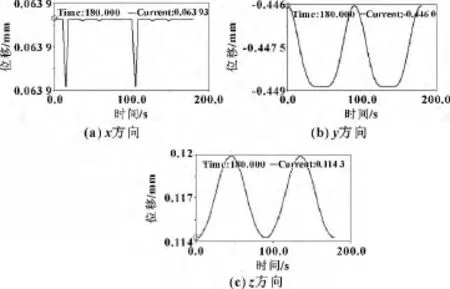
圖7 焊槍末端位置變化仿真結果
2.2 焊接機器人4號軸的設計分析
機器人的4號軸結構與5號軸基本相似,但是方向與5號軸垂直。同時4號軸的兩個圓弧導軌的圓弧中心線與5號軸導軌的圓弧中心線正好處于垂直相交的位置,裝配完成后的模型如圖8所示。

圖8 4號軸裝配完成后的模型
然后將4號軸和5號軸整體看成一個虛擬樣機模型,分析其工作過程中4號軸的動力學特性。在分析過程中充分考慮5號軸對4號軸的影響,如圖9所示為4號軸關節處的動力學分析結果。
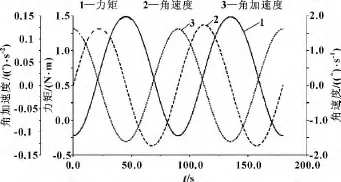
圖9 4號軸旋轉關節動力學仿真結果
圖10 、11是4號軸關節處的角速度、角加速度曲線和4號電機軸上所需力矩曲線。從圖11中可以看出電機驅動軸的最大驅動力矩為0.1 Nm。同時考慮到轉速和尺寸等其他方面的要求,因此選擇與5號軸相同的安川SGMAH-04A電機。
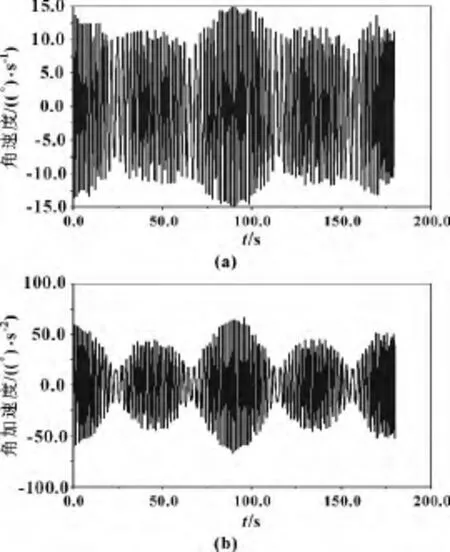
圖10 4號軸關節速度和角加速度曲線
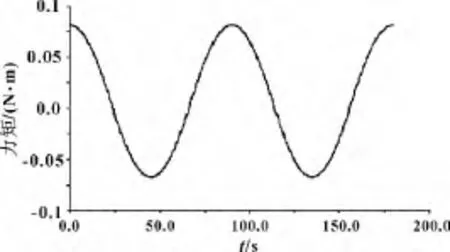
圖11 4號軸電機力矩曲線
2.3 焊接機器人3號軸的設計分析
3號軸是一個移動關節軸,主要任務是調節焊接頭的上下位置,這里采用絲杠導軌結構來將電機的旋轉運動變為直線運動。其中伺服電機通過減速器減速后與滾珠絲杠連接,然后通過滾珠絲杠上滑塊的運動將電機旋轉運動轉化為移動平臺的直線運動,而兩側直線導軌負責支撐和提供直線路徑。完成3號軸結構設計之后,將其與4、5號軸進行虛擬裝配并進行干涉檢查后導入到ADAMS中形成新的虛擬樣機模型,如圖12所示。在該模型上創建約束和驅動,然后將這3個軸的裝配體作為樣機進行動力學仿真,其仿真曲線如圖13所示。

圖12 3號軸裝配后虛擬樣機模型
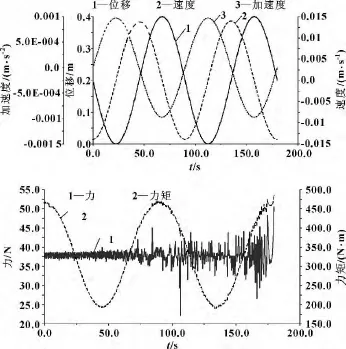
圖13 3號軸滑軌處的動力學仿真曲線
從圖中可以看出,由于3號軸是做上下運動,因此第4號和第5號軸部分的重力對3號軸的影響比較大。在3號軸向下運動時,由于重力起到促進作用,屬于動力,因此需要電機傳來的驅動力較小,而當3號軸向上運動時,重力作用充當阻力,因此需要更大的驅動力。
如圖14所示為3號軸絲杠處旋轉關節的動力學仿真曲線。從圖中可以看出,隨著3號軸上下的周期運動,絲杠上的角速度和角加速度也處于周期變化過程中。與此同時需要的力矩也處于周期變化,其中絕對值最大的時候達到3.39 Nm,考慮到運行速度的要求和運行過程中的平穩性,這里在驅動電機輸出軸上添加了一個減速比為10的減速器,因此電機選用了安川SGMAH-04A型號。
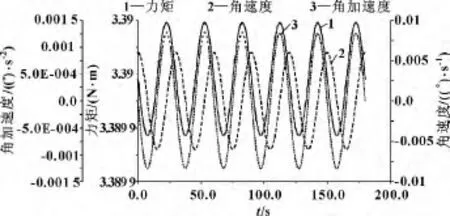
圖14 3號軸旋轉絲杠的動力學仿真曲線
2.4 焊接機器人2號軸的設計分析
2號軸結構基本與3號軸相同,也是用絲杠導軌結構來將電機的旋轉運動變為直線運動,只是2號軸是水平放置,主要用來調節焊槍在徑向上的位置。完成設計和裝配后的虛擬樣機模型如圖15所示。

圖15 裝配2號軸后的虛擬樣機模型
設定3、4和5號軸模型相對于2號軸的絲杠進行正弦形式的運動 (如圖16中的位置曲線),然后進行虛擬樣機的動力學仿真,圖16所示為滑軌處滑動副的運動速度和加速度曲線。從圖中可以看到,速度和加速度也隨運動形式進行周期性的變化。
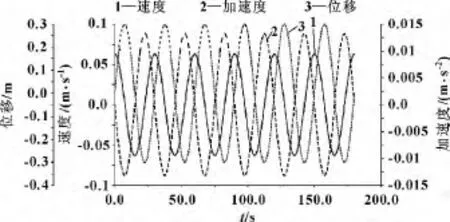
圖16 2號軸滑軌處的動力學仿真曲線
與此同時分析2號軸絲杠軸上的動力學特性,如圖17所示。從圖中可以看絲杠的運動形式也是呈周期性的,而且變化周期與滑軌上的運動相同,但是幅度較大,這與絲杠副的減速比有關。同時絲杠軸上所受的力和力矩如圖中的力和力矩曲線所示,從中可以看到力和力矩不但與2號軸運動形式有關,同時也受4號軸運行的影響,這是由于4號軸運動引起3、4和5號軸中心變化。2號最大力矩達到9.5 Nm,同時考慮運行速度和減速器的減速比 (10∶1),因此也選用了安川SGMAH-04A型號電機。
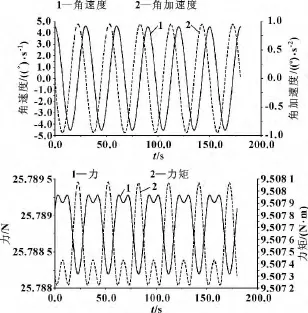
圖17 2號軸旋轉絲杠的動力學仿真曲線
2.5 焊接機器人1號軸的設計分析
1號軸的設計在整個結構中比較關鍵,一方面這是由于1號軸需要承擔后面幾個軸的重力,因此需要強度大;另一方面1號軸的負載受到后面各個軸的影響較大,因此需要考慮的因素較多。1號軸的機構如圖18(a)所示,底部是一個帶軸承的法蘭結構,用于連接夾持工件的卡盤;中間部分是一個筒體,為了增加剛度特意添加了加強筋;上部采用渦輪蝸桿結構。考慮到2、3、4和5軸是一個質量較大的懸臂結構,因此1號軸受到的彎曲力矩較大,需要在筒體中間添加了一個抗彎矩的心軸,該心軸底部與下法蘭通過軸承連接,上部也添加軸承,同時使用承受徑向力較大的圓錐滾子軸承。裝配完成軸的虛擬樣機模型如圖18(b)所示。

圖18 1號軸實體模型圖和機器人虛擬樣機模型
在虛擬樣機中設定1號軸以一定的角速度勻速運動,2、3、4和5號軸進行正弦形式的運動,然后進行動力學仿真。圖19中所示為1號軸的仿真曲線,可以看到1號軸所受的旋轉力矩呈周期性變化,這是由于2號軸運動引起3、4和5號軸相對于1號軸的慣性力矩變化引起的。
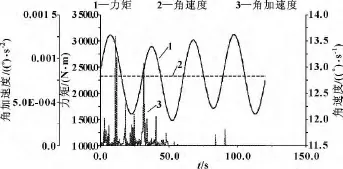
圖19 轉臺動力學仿真曲線
分析1號軸所受的彎曲力曲線如圖20所示,從圖中看到x方向的彎曲力成周期性變化,這主要是由于3、4和5號軸在z方向上的重心變化引起的。而y向的彎曲力在大周期中又有小周期,大周期同樣是由于3、4和5號軸部分總體重心在z方向上的變化引起,而小周期是由于4、5號軸運動引起的小部分模型重心位置在x方向的變化引起的。這部分的仿真結果為設計中添加心軸提供了理論的支持。
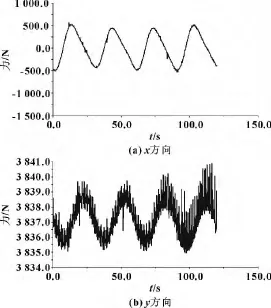
圖20 轉軸所受彎曲力的仿真曲線
經過結構優化設計后,完成加工裝配后機器人的實物如圖21所示。

圖21 機器人實物圖
3 結束語
在制定的虛擬裝配流程與優化設計流程的指導下,通過采用UG軟件完成參數化模型的建立,實現了虛擬裝配,然后采用ADAMS軟件完成基于虛擬裝配和虛擬樣機技術的動力學分析,對機器人各個關節軸結構進行了詳細設計和優化,這種將機器人的動力學性能和結構優化設計同步貫穿于整個設計過程的設計分析方法,提高了整個系統的整體性能,為相關焊接機器人結構和驅動裝置的優化設計提供了重要依據。
[1]張永貴.噴漆機器人若干關鍵技術研究[D].西安:西安理工大學,2008.
[2]RAKESH Gupta.Prototyping and Design for Assembly A-nalysis Using Multimodel Virtual Environment[J].Computer-Aided Design,1997,29(8):585-597.
[3]JAYARAM S,CONNACHER H I,LYONSK W.Virtual Assembly Using Virtual Reality Techniques[J].Computer-Aided Design,1997,29(8):575-584.
[4]鄭凱,胡仁喜,陳鹿民.ADAMS 2005機械設計高級應用實例[M].北京:機械工業出版社,2006.
[5]鄭建榮.ADAMS——虛擬樣機技術入門與提高[M].北京:機械工業出版社,2002.
[6]JEONG SK,LEE G Y.Development of High Speed Rotating Arc Sensor and Seam Tracking Controller for Welding Robots[J].IEEE ISIE,Pusan,2001,2:845-850.
[7]PASHKEVICH A P,DOLGUIA B,SEMKIN K I.Kinematic Aspects of a Robot-positioner System in an Arc Welding Application[J].Control Engineering Practice,2003,11(6):633-647.
[8]株式會社安川電機.安川∑-Ⅱ系列用戶手冊(伺服的選型與數據表)[M].2002.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
