現代控制理論與經典控制理論的差異
2014-04-29 10:28:16張智容栗晶晶
電腦迷 2014年21期
關鍵詞:差異
張智容 栗晶晶

摘 要 本文主要通過研究對象、數學建模、應用領域等方面分析比較現代控制理論與經典控制理論的不同,對控制方法的選取提供參考作用。
關鍵詞 現代控制理論 經典控制理論 差異
中圖分類號:O23 文獻標識碼:A
0前言
控制這一概念本身就反映了人們對戰勝自然的渴望,控制理論也自然而然的在人們認識與改造自然的歷史中發展起來。經典控制理論與現代控制理論作為控制理論的主要部分,兩者之間有區別又有聯系。筆者于此通過分析對比研究對象、數學模型、基本方法等方面介紹它們的不同。
1 控制理論簡介
1.1 控制理論的性質
控制理論研究如何改進動態系統的性能以達到所需目標,這個廣義定義包含了人類活動的許多方面。自動控制領域有兩個不同但又相互聯系的主題:其一是反饋的概念,反饋概念的精髓是可以得到各種輸出和它們的各個所需值的實時比較的度量-各種誤差,再由以此測量到的誤差來減少誤差。其二是最優控制的概念,控制的目標是使以數字量表示的顯示在一段時間上的所需性能和系統實際性能間的差異的性能指標為最小,要尋求一個使性能指標最小的時間函數的控制。
1.2 控制理論的發展
自動控制原理及其實踐的歷史悠久,它是在人類認識和改造世界的過程中產生的。古代中國、古埃及和古巴比倫都使用過自動計時漏斗。1788年,瓦特制造蒸汽離心調速器。1868年,麥克斯韋解釋了瓦特速度控制系統中出現的不穩定現象,開辟了用數學方法研究控制系統中運動現象的途徑。勞斯、赫爾維茨分別在1877年、1895年獨立建立了直接根據代數方程的系數判別系統穩定性的準則。1927年,布萊克發明了負反饋放大器。1932年,奈奎斯特提出了根據頻率響應判別系統穩定性的奈奎斯特穩定性判據,而且給出了穩定裕量的概念。1940年,伯德進一步將頻率響應法加以發展,經典控制理論開始形成。1942年,哈里斯引入傳遞函數概念。1948年,埃文斯提出根軌跡法。1948年,維納出版了《控制論》,論述了控制理論的一般原理及方法,推廣了反饋的概念。1954年,錢學森出版了《工程控制論》。20世紀50年代,經典控制理論發展到相當成熟的地步。
20世紀50年代中期,科學技術及生產力的發展,特別是空間技術的發展,迫切要求解決更復雜的多變量系統、非線性系統的最優控制問題。實踐的需求推動了控制理論的進步。1956年,貝爾曼等人提出了狀態分析法和動態規劃法。1958年,龐特里亞金提出了極大值原理。1959年,卡爾曼創建了卡爾曼濾波理論,1960年,卡爾曼把狀態空間法系統地引入控制理論中,提出了能控性和能觀性的概念。到1960年初,現代控制理論應運而生。
2 兩種控制理論概述
2.1 經典控制理論
經典控制理論主要描述系統單輸入單輸出特性,應用傳遞函數法和拉普拉斯變換法作為研究方法和工具。研究問題的著眼點是系統的輸出,分析和設計方法主要是在復頻域,運用頻率法、根軌跡法等校正系統,設計PID控制。頻率法物理概念清楚,直觀且實用,但難于實現最優控制。經典控制理論在系統設計和分析時無法考慮系統的初始條件,難以達到高精度的位置、速度等控制系統設計的要求。
2.2 現代控制理論
現代控制理論主要用來解決多輸入-多輸出、多變量系統的問題,系統可以是線性的或非線性的、定常和時變的。這一理論的特點是采用處理狀態空間描述作為系統的數學模型,以狀態空間分析方法為核心。以線性代數、矩陣理論為研究工具。研究問題的著眼點是系統的狀態,分析方法在實域、復域進行。現代控制理論從理論上解決了系統的可控性、可觀性、穩定性以及許多復雜系統的控制問題。
3 經典控制理論與現代控制理論的差異
現代控制理論是在經典控制理論的基礎上發展起來的,雖然兩者在數學工具、理論基礎和研究方法上有著本質的區別,但對動態系統進行分析研究時,兩種理論可以互相補充,而不是相互排斥。特別是對線性定常系統的研究,越來越多的經典控制理論中行之有效的方法已滲透到現代控制理論內部,如零極點配置和頻域方法,大大豐富了現代控制理論的研究內容。下面將從研究對象、數學模型及應用領域對兩者進行對比分析。
3.1 研究對象
經典控制理論的控制對象主要是較為簡單的單輸入-單輸出線性定常控制系統。無法表示時變系統、非線性系統和非零初始條件下的線性定常系統。但是實際上,理想的線性系統并不存在,可以說都是非線性系統,但是,在系統非線性不嚴重的情況下,某些條件可以近似看成線性。對性能要求不必太精準的系統來說,經典控制理論已被全世界控制界和工程應用界證明是完全合適而且很有成效的。
現代控制理論相對于經典控制理論,應用的范圍更廣。現代控制理論采用的是時域的直接分析方法,能對給定的性能或綜合指標設計出最優控制系統。但并不能說現代控制理論更優于經典控制理論,我們要根據實際情況,選擇合適的理論進行分析。
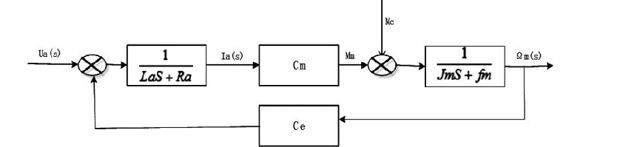
例如研究電樞控制直流電動機的工作過程,電樞電壓ua(t)為輸入量,電動機轉速wm(t)為輸出量,機構圖如下:
其中,Ra,La分別是電樞電路的電阻和電感,Mc是折合到電動機軸上的總負載轉矩。這是一個單輸入單輸出的系統,采用兩種控制理論都可以對其求解與設計。人們常采用經典控制理論的方法,應用起來方便可靠、問題相對簡單、求解比較直接,更可省許多經濟支出。
3.2 數學模型
數學模型能反映系統固有的穩態、動態特性。從數學模型上來看,經典控制理論主要采用常微分方程、傳遞函數和動態結構圖,僅描述了系統的輸入和輸出之間的關系,不能描述系統內部結構和處于系統內部的變化,且忽略了初始條件。不能對系統內部狀態的信息進行全面的描述。因此,經典控制理論的數學描述屬于系統的外部描述。當系統是多輸入多輸出時,傳遞函數變成一個函數矩陣,用原來的傳遞函數方法、頻率特性方法處理問題變得復雜,難以應用。
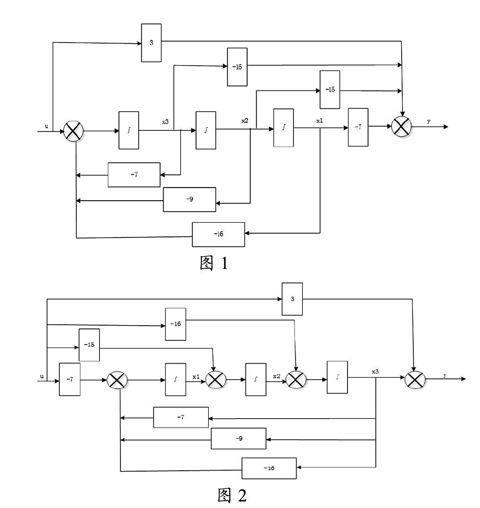
現代控制理論的數學模型通常是狀態空間表達式或狀態變量圖來描述的,這種描述又稱為系統的“內部描述”,能夠充分揭示系統的全部運動狀態。而且,用矩陣形式表示的狀態空間表達式,在數學符號和運算上得以簡化,適于計算機求解,為復雜系統的工程實現帶來便利。易于實現最優控制和實時控制。
從兩個圖中可看出,傳遞函數只可以描述系統的外部動態特征,而狀態空間模型卻可以反映出內部的特征。兩個系統的結構圖不相同,雖然反映的輸入輸出關系與傳遞函數相同,但描述不同的系統特性。所以用傳遞函數比較適合研究系統輸出特性,用狀態空間模型比較適合內部特性的研究。
3.3 應用領域
經典控制理論主要用于解決工程技術中的各類控制問題,尤其在航空航天技術、武器控制、通信技術等方面。現代控制理論發展后,自動控制理論的概念廣泛應用于工業、農業、交通運輸及國防建設等領域。比起經典控制理論,現代控制理論考慮問題更全面、更復雜,主要表現在考慮系統內部之間的耦合,系統外部的干擾,但符合從簡單到復雜的規律。可以說自動控制應用領域遍及眾多的科技和生活方面,但并不是說現代控制理論取代了經典控制理論,前者是后者的進步和補充,二者在其相應領域有著不可替代的作用。
4 結語
通過對兩種控制理論的分析,可以認識到經典控制理論是直觀整體的認識控制系統,而在改進控制系統內部特征方面作用不大;然而現代控制理論卻能很好地改進和設計控制系統,對認識一個低階控制系統卻不直接簡便。總的來說,每種控制理論都有它的缺點和優點,兩種理論共行并舉才是解決實際問題、發展科技和社會的可行之道。
參考文獻
[1] 賀良華.現代控制理論及應用[M].中國地質大學出版社,2013.
[2] 劉豹,唐萬生.現代控制理論[M].機械工業出版社,2011.
[3] 姚壽文.自動控制理論基礎[M].北京理工大學出版社,2006.
[4] 王傳波,劉旸.現代控制理論與經典控制理論的對比研究[J].機械管理開發,2006.
[5] 謝亞軍.淺析經典控制理論與現代控制理論的異同[J].科學與財富,2013.
猜你喜歡
英語世界(2023年10期)2023-11-17 09:19:16
汽車實用技術(2022年10期)2022-06-09 11:16:58
音樂探索(2022年2期)2022-05-30 21:01:37
收藏界(2019年3期)2019-10-10 03:16:40
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
中國特種設備安全(2018年11期)2019-01-08 02:08:32
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
中國非營利評論(2017年1期)2017-11-09 03:09:10
海外華文教育(2017年8期)2017-11-07 04:42:02
現代語文(2016年21期)2016-05-25 13:13:50
