游梁式抽油機變速拖動載荷與平衡分析
2014-05-04 09:31:22王建萍劉彩玉楊胡坤
石油礦場機械 2014年5期
王建萍,蘇 穎,劉彩玉,楊胡坤
(1.大慶油田 技術培訓中心,黑龍江 大慶163255;2.大慶油田裝備制造集團,黑龍江 大慶163255;3.東北石油大學 機械科學與工程學院,黑龍江 大慶163318)①
在抽油機節能技術研究方面,通常集中于抽油機本身的結構改造或采用新型節能電動機,以期達到游梁式抽油機的節能目的。例如下偏杠鈴式抽油機、塔架式抽油機及節能電機[1-3]等,但已基本達到了抽油機本身節能的極限。
隨著電控技術的發展,使得游梁式抽油機的變速拖動成為可能。這種技術的應用來源于電機,已在數控抽油機、塔架式抽油機中應用。利用現代變頻調速技術,實現電機在工作過程中的動態變頻調速,由此可以實現游梁式抽油機變速拖動。2012年,這種變速拖動技術開始在國內進行試驗,并取得了一定的應用效果。變速拖動在游梁式抽油機上的應用尚缺乏理論分析基礎,例如游梁式抽油機懸點運動規律對抽油機懸點載荷的影響、平衡效果等。
游梁式抽油機變速拖動對抽油機的動力學分析提出了新的研究課題。在常規條件下,游梁式抽油機的分析方法均是以曲柄運動規律為起始研究點,分析抽油機懸點載荷特性、抽油機的平衡特性等。但是在變速驅動下,必須在事先確定了游梁式抽油機懸點運動特性后方可研究曲柄的運動規律或電動機的工作特性。因此,必須提出一種新的研究方法進行游梁式抽油機變速拖動節能技術研究。
本文以游梁式抽油機懸點為基點,提出了游梁式抽油機在常規運動、梯形運動及三角形運動3種運動速度下的懸點載荷、轉矩因數、平衡效果及曲柄轉速的計算方法。綜合游梁式抽油機懸點載荷及平衡效果,得出3種方案中較好的為懸點梯形速度運動曲線。
1 初始條件
以CYJ10-3-37 HB型抽油機井為例,其結構參數如表1所示,井況參數如表2所示。
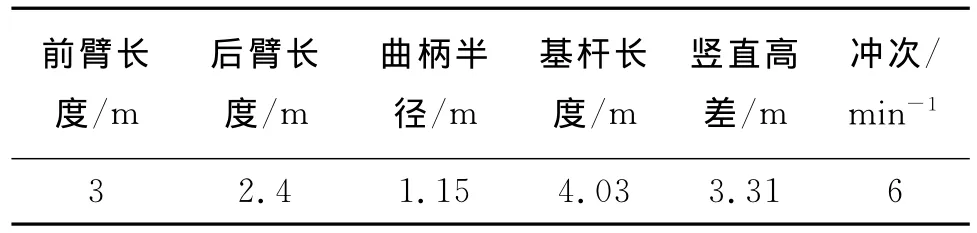
表1 CYJ10-3-37HB型抽油機結構參數
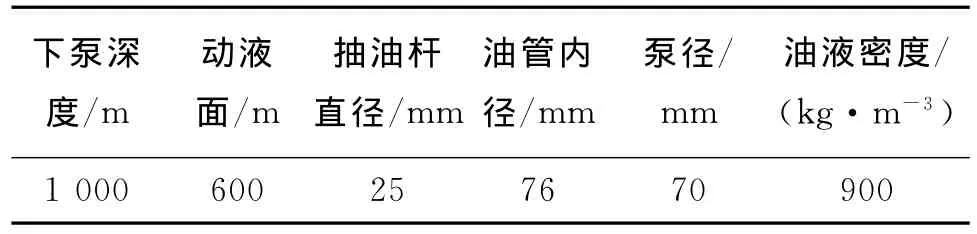
表2 井況參數
2 計算結果分析
抽油機懸點載荷為

式中:Ps為懸點靜載荷;Pa為懸點慣性載荷;Pv為懸點振動載荷;Pf為摩擦載荷。
式(1)已經說明:在抽油機上、下沖程過程中,當抽油機井況參數確定后,抽油機懸點靜載荷Ps不會發生改變,即與抽油機懸點運動規律無關;在分析計算抽油機懸點載荷中,由于P f影響因素復雜,往往忽略P f;Pa與懸點上、下沖程過程中加速度有關。根據G.bus對抽油機懸點振動載荷的一維波動方程計算方法,抽油機懸點振動載荷的最大值與桿、管彈性變形結束后的懸點速度有關。因此,有效改變抽油機懸點運動規律,可以抑制抽油機的懸點慣性載荷和振動載荷,即改變抽油機懸點加速度和桿、管彈性變形結束后的懸點速度。
抽油機幾何分析模型如圖1所示。抽油機常規分析過程中,當抽油機沖次確定后就確定了游梁式抽油機曲柄的運動規律,從而可以通過曲柄搖桿機構計算分析抽油機懸點運動規律,可以進一步分析計算抽油機的懸點載荷和抽油機的平衡特性。
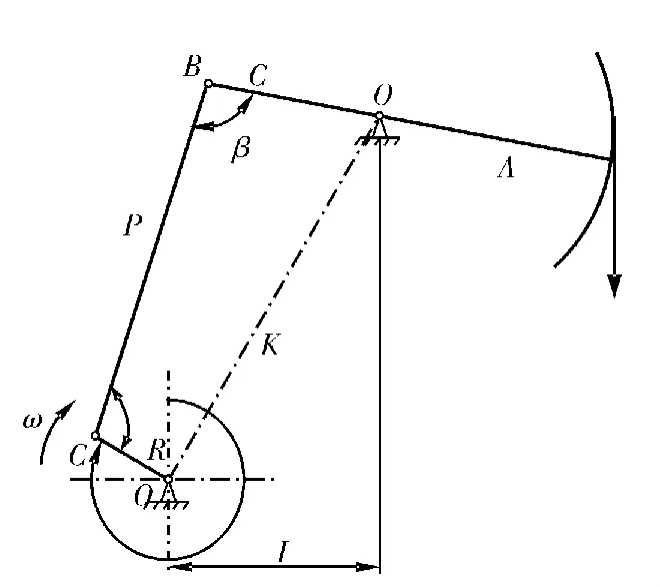
圖1 抽油機幾何分析模型
在抽油機變速驅動過程中,本文采取比較法,假設抽油機在變速驅動過程中,抽油機懸點運動規律存在梯形速度曲線和三角形速度曲線。在分析過程中,假設抽油機上、下沖程時間相等,根據文獻[4]懸點最大速度為

通過計算機編程技術,由此可以確定在變速驅動條件下抽油機懸點的運動規律,然后再根據抽油機幾何結構尺寸反向求曲柄的運動規律。
2.1 運動分析
2.1.1 速度曲線
以抽油機常規分析為基礎,確定在一定幾何結構條件下抽油機懸點沖程,根據前文所述,即可確定在變速驅動下抽油機懸點不同特性的速度曲線,如圖2所示。
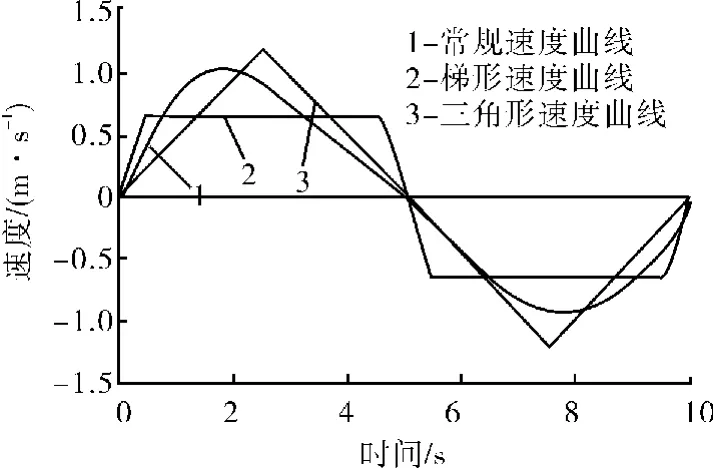
圖2 懸點速度對比曲線
2.1.2 位移曲線
在變速運動中,當懸點速度曲線計算得到后,根據位移與速度關系,有

式中:v為懸點速度;t為時間。
由此在變速的拖動下,懸點的位移曲線如圖3所示。
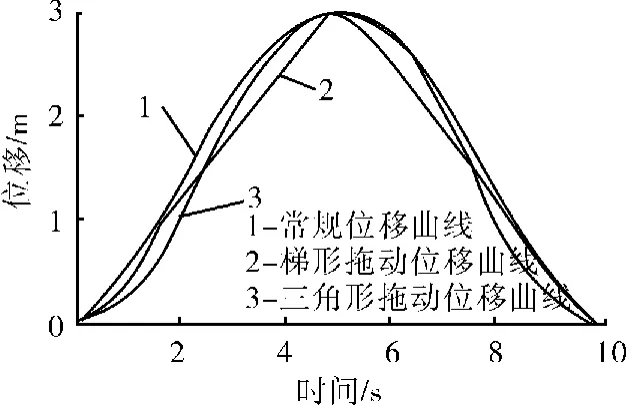
圖3 懸點位移對比曲線
2.1.3 加速度曲線
同理,在變速拖動條件下,當已知懸點速度運動規律后,懸點加速度計算公式為

則抽油機在變速拖動條件下的加速度對比曲線如圖4所示。
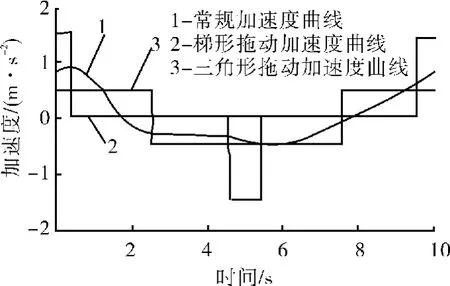
圖4 懸點加速度對比曲線
2.1.4 曲柄角速度分析
顯然,游梁式抽油機在常規拖動中忽略電動機滑差率及帶傳動彈性滑動的影響,抽油機曲柄軸的轉速為恒值。當懸點速度為梯形或三角形曲線時,通過曲柄搖桿機構的幾何參數反向求取曲柄轉速,如圖5所示。
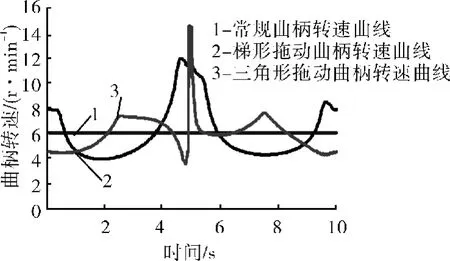
圖5 曲柄角速度對比曲線
2.1.5 轉矩因數分析

在抽油機常規分析中,結合圖1,當抽油機結構參數確定后,轉矩因數為[5]式中:A為前臂長;C為后臂長;R為曲柄工作半徑;α為連桿與曲柄的夾角;β為游梁與連桿的夾角。
常規分析中,轉矩因數相對于曲柄轉角或沖程時間的值是一定的,即當抽油機幾何結構尺寸確定后,不管何種沖次,抽油機轉矩因數曲線都是固定不變的。但是當電動機變速拖動抽油機時,雖然曲柄轉角所對應的轉矩因數值不發生改變,但以時間所對應的轉矩因數值將發生改變,此時,抽油機在變速拖動條件下計算方法應采取式(6)進行計算,即

式中:ω為曲柄角速度,rad/s。
轉矩因數對比曲線如圖6所示。
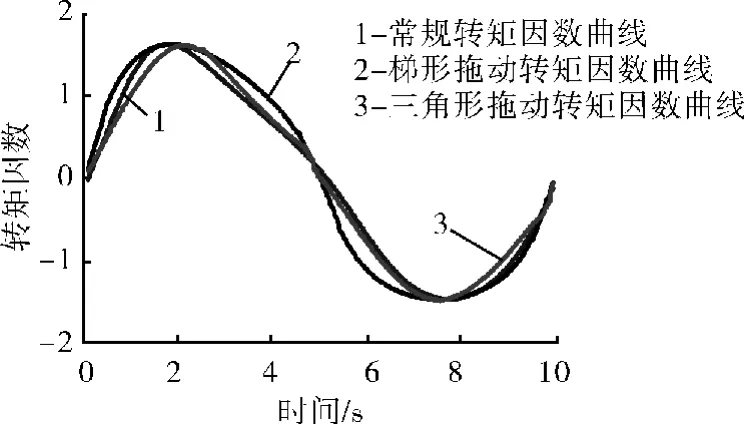
圖6 轉矩因數對比曲線
2.2 懸點載荷特性
關于抽油機懸點載荷的計算方法在其他文獻中已經進行了介紹,本文不再作進一步的闡述,僅給出抽油機在常規拖動和變速拖動條件下的懸點動力示功圖,如圖7所示。
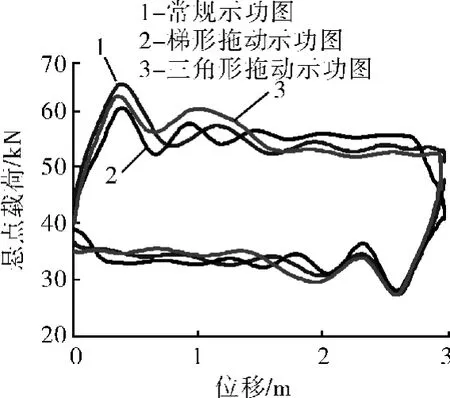
圖7 懸點動力示功圖對比
結合圖7中在不同條件下示功圖曲線,不同載荷值如表3所示。
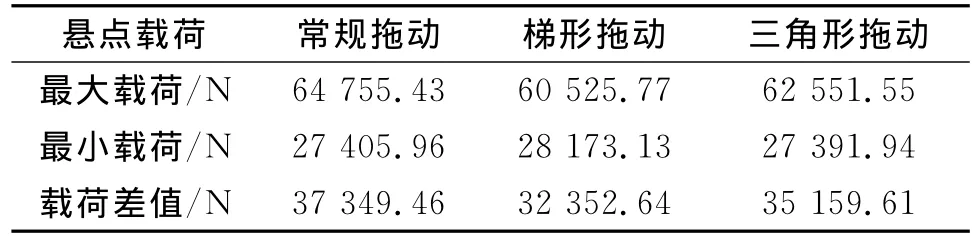
表3 不同拖動懸點載荷值
仿真計算結果表明:以抽油機常規拖動為基礎,梯形拖動交變載荷差值降低率為13.38%,最大載荷降低率為6.53%,三角形拖動交變載荷差值降低率為5.86%,最大載荷降低率為3.4%。顯然當懸點速度曲線為梯形時,抽油機懸點交變載荷和最大載荷降低幅度均較大。
2.3 平衡特性
游梁式抽油機曲柄平衡計算方法采用式(7)進行分析[5],即

式中:M為曲柄軸凈轉矩;Mcmax為曲柄最大平衡轉矩;B為抽油機結構不平衡重;τ為曲柄相位角。
經過迭代算法,以常規拖動平衡重峰值轉矩為基準,得到3種不同驅動條件的曲柄軸凈轉矩,如圖8所示。
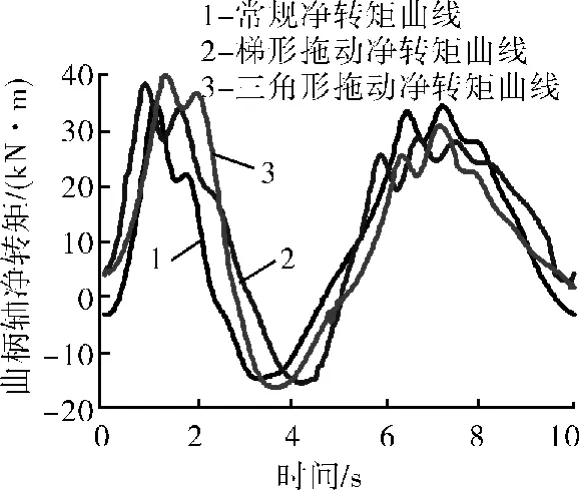
圖8 曲柄軸凈轉矩曲線對比
由圖8可知:相對于常規拖動,梯形拖動時凈轉矩負值得到了減少,有利于降低電機拖動的無功功率,具有一定的節能優勢。三角形拖動時凈轉矩負值有所增加,因此在游梁式抽油機變速拖動過程中不宜選擇懸點速度為三角形拖動。關于具體的節能優勢應當進一步結合拖動電機的工作性能進行分析。
3 結論
1) 在變速拖動下,游梁式抽油機運動學計算采取以懸點速度分析為起點,逐步分析抽油機懸點運動規律、曲柄運動規律及懸點載荷的計算。當曲柄運動規律確定后,結合抽油機的傳動參數,可以確定電動機的變頻特征。
2) 綜合比較3種懸點速度特性,在懸點速度為梯形曲線時,相對于常規拖動,抽油機懸點最大載荷可降低6.53%,交變載荷降低13.38%,降載明顯。
3) 在同等平衡轉矩條件下,梯形拖動時凈轉矩負值得到了減少,有利于降低電機拖動的無功功率,具有一定的節能優勢。但具體的節能效果有待分析。
[1] 郭慶榮,李全,曹佳,等.塔架式抽油機PLC控制系統設計[J].石油礦場機械,2012,41(12):29-32.
[2] 張喜順,吳曉東,吳迪,等.利用實測功率曲線預測下偏杠鈴抽油機示功圖[J].石油礦場機械,2012,41(12):60-62.
[3] 鐘力,陳天為.抽油機用雙功率電機的設計及試驗研究[J].石油礦場機械,2004,33(6):85-87.
[4] 郭公喜,葉志強.直線電機驅動抽油機的試驗研究[J].石油礦場機械,2005,34(4):17-20.
[5] 崔振華,余國安,安錦高,等.有桿抽油系統[M].北京:石油工業出版社,1994.
猜你喜歡
石油石化節能(2022年12期)2022-12-30 04:45:02
設備管理與維修(2022年21期)2022-12-28 07:35:42
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
計算機測量與控制(2017年6期)2017-07-01 16:24:20
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
中國煤層氣(2014年6期)2014-08-07 03:07:05
終身教育研究(2014年5期)2014-02-28 01:23:06
河南科技(2014年16期)2014-02-27 14:13:19
