非圓旋轉工件隨動支撐裝置及其運動分析
2014-05-11 03:10:10岳彥芳辛志博
制造業自動化 2014年10期
岳彥芳,辛志博,楊 光
(河北科技大學 機械工程學院,石家莊 050018 )
非圓旋轉工件隨動支撐裝置及其運動分析
岳彥芳,辛志博,楊 光
(河北科技大學 機械工程學院,石家莊 050018 )
0 引言
在對弱剛性工件加工時,加工力的作用會造成被加工工件的撓曲變形,使得加工精度、表面粗糙度等受到影響。傳統加工過程中通常采用減小切削用量、增加跟刀架等措施來減小變形,保證精度。但減小切削用量會使生產周期加長,成本增高,而傳統跟刀架無法實現對非圓工件旋轉加工時的支撐。
隨著數控加工技術的不斷發展,曲面構件的設計和加工越來越多,越來越復雜,且精度要求越來越高[1,2]。特別是像葉片類構件不僅具有較大的非圓度,帶有負曲面,而且精度往往要求很高。因此,研究這類構件旋轉加工所需的中間跟隨支撐裝置具有重要意義。本文設計了一種用于弱剛性非圓工件旋轉加工過程中的“V”型隨動支撐裝置,并通過分析非圓截面的幾何形狀和DXF圖形存儲格式的特點,給出了通過CAD圖形驅動自動生成支撐臂瞬態位移的計算方法。實驗證明了該裝置的有效性。
1 支撐裝置的特點及運動過程
典型的非圓截面曲線有凸(正)有凹(負),當工件旋轉時,為保證支撐裝置對工件支撐性的實時性、連續性,設計的“V”型隨動支撐裝置結構如圖1所示。
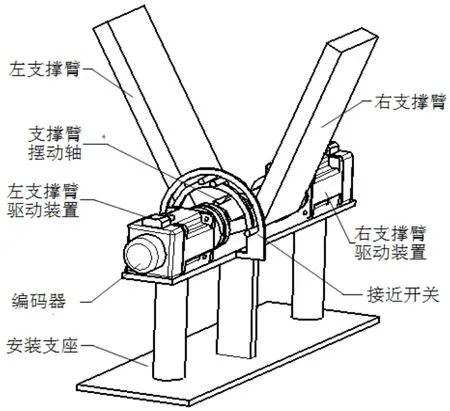
圖1 支撐裝置整體結構圖
該支撐裝置包括左、右兩個支撐臂,位于安裝支座上的兩臺伺服電機分別驅動支撐臂擺動。兩臺電機轉軸位于同一直線上,故電機的轉動中心即為兩支撐臂的擺動中心。裝配時保證擺動中心位于工件旋轉中心正下方,擺動中心與旋轉中心的連線為兩支撐臂的擺動軸線,左、右兩支撐臂分別在軸線左、右兩側跟隨工件往復擺動,設定兩支撐臂遠離軸線擺動的方向為正方向,即兩支撐臂的擺角θ范圍為0到90°。在電機末端安裝絕對式編碼器,形成對電機的閉環控制。同時,安裝支座上的接近開關保證了支撐臂的擺動范圍。
便于分析,將“V”型支撐裝置的左、右支撐臂分別用剛體桿來代替。該支撐裝置對非圓工件的支撐運動主要分兩種形式:一是工件表面為凸面,支撐臂與工件相切,切點即為支撐點,隨工件轉動和支撐臂擺動,切點沿支撐臂的支撐面連續運動。如圖2(a)所示;二是工件表面由凸轉為凹時,工件的旋轉會使得支撐點產生跳躍,直接從拐點B跳到拐點C,越過凹曲面BC段,從而支撐臂速度的連續性。如圖2(b)所示。

圖2 支撐情況示意圖
2 支撐臂運動學分析
2.1 創建分析模型
現假設擺動中心與旋轉中心距離為W。左支撐臂和右支撐臂的桿長為L。在整個運動學分析中,工件逆時針旋轉。應用相對運動學的研究方法,設工件的位置固定不動,則左、右支撐臂的擺動中心以工件的旋轉中心為圓心,做半徑為W的順時針圓周運動。即工件逆時針轉動0.1°等價于支撐臂擺動中心順時針轉動0.1°。如能求出工件轉動各角度時所對應的支撐臂擺動角度,就可以模擬支撐臂整個支撐過程中的運動情況。
為方便獲取工件支撐截面輪廓信息,著重研究支撐裝置的運動情況。通過CAD軟件將支撐截面輪廓曲線以二維多段線形式保存在DXF文件中,提取支撐截面DXF文件數據[3,4],得到截面旋轉中心點坐標O(xo,yo),同時以點坐標形式沿順時針旋轉方向依次保存支撐截面輪廓點坐標Pi(xPi,yPi),其中i=1,2,3,…,S為截面輪廓點坐標序號,S為截面輪廓點個數。
2.2 切點跳過凹曲面連續過渡運動求解
如圖3所示,當支撐臂與工件支撐截面的切點運動到Pm時,連接PmPm+1,通過判斷直線PmPm+1與支撐截面是否相交,若相交則判斷直線PmPm+2與支撐截面是否相交,直到不再相交時停止計算,則此時點Pm+z為下一次支撐臂與工件支撐截面的切點。

圖3 切點跳過凹曲面
工件支撐截面輪廓各線段的方程為:

聯立方程(1)、(2),判斷直線PmPm+1與其他支撐截面輪廓線段是否存在交點。
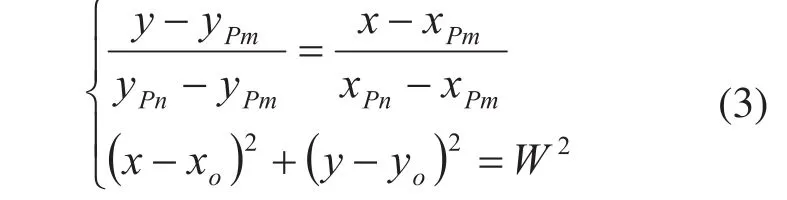
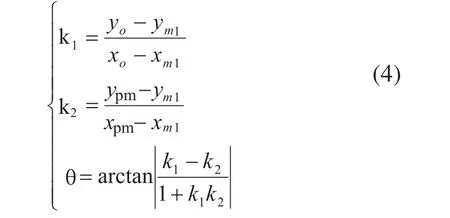
當式方程有解時,表明PmPm+1與支撐截面輪廓相交。重復上式直到判斷出直線PmPm+z與支撐截面不在相交,即式方程無解。根據公式求出點Pn(xpn,ypn)即點Pm+z,為下一次支撐臂與支撐截面的切點坐標。通過直線PmPn與擺動中心運動軌跡圓求出當切點運動到Pn時所對應的擺動中心坐標點Mn(xm2,ym2),其公式為:

上述步驟實現了支撐臂與支撐截面的切點跳過凹曲面向下一段凸曲面連續過渡。
通過以上的分析計算,只要給出工件支撐截面的DXF截面圖,計算機便可機根據如圖4所示流程計算出支撐臂的運動軌跡信息。

圖4 支撐臂運動流程圖
3 飛機襟翼支撐模擬仿真與實驗
3.1 模擬仿真
為驗證上述運動分析的正確性,利用VC++6.0編寫支撐裝置運動仿真動畫,如圖5所示。該仿真的運動原理為:工件支撐截面以設定的速度圍繞旋轉中心轉動,程序讀取通過上述運動分析方法計算得來的數據控制相應的支撐臂跟隨工件擺動,從而實現對支撐情況的仿真。在仿真程序中設計了一套報警模塊,當工件輪廓曲線與支撐臂出現交叉或支撐臂遠離工件未起到支撐作用時,報警模塊將彈出相應的報警指示。根據飛機襟翼支撐截面DXF文件,計算支撐臂擺動角度,導入上述仿真程序進行運動仿真。仿真過程中未彈出報警指示,驗證了擺動角度計算結果的正確性,支撐臂實現了對襟翼的跟隨運動。
3.2 支撐實驗
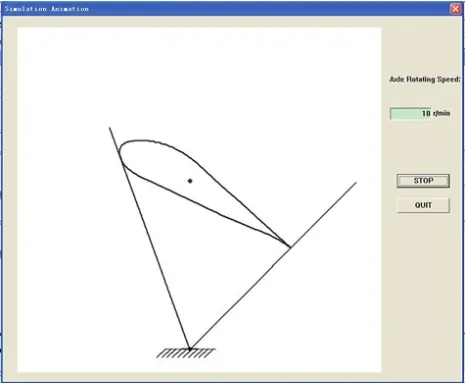
圖5 支撐運動仿真程序

圖6 實際支撐結果照片
仿真合格后進入實驗階段。實驗系統選用兩臺Panasonic A5系列MDME102G1S型伺服電機分別為兩個支撐臂提供動力。伺服電機與Delta Green Tech ZDS120 L1-10型減速機和支撐臂串連,實現對支撐臂擺動控制。支撐控制系統的主要控制難點在于當工件旋轉時,兩個支撐臂實時跟隨工件擺動,屬于聯動控制范疇。整個微機控制系統采用由工業控制計算機和Trio209多軸運動控制器組成的上、下位機分布式控制結構。工作時上位機運行利用上述運動分析方法編寫的支撐運動軌跡生成程序,求出支撐運動軌跡并將軌跡點傳輸到運動控制器,運動控制器根據工件當前旋轉角度控制支撐臂運動到相應目標位置,實現對工件的隨動支撐。利用快速成型設備制造飛機襟翼模型,將模型裝卡到上述實驗系統進行支撐試驗。試驗結果表明該支撐裝置能夠實現對襟翼模型的實時跟隨運動,起到對襟翼的支撐作用,實際支撐情況如圖6所示。
4 結論
本文通過研究非圓截面的幾何特點,設計了一種用于弱剛性非圓工件旋轉加工過程中的“V”型中部支撐裝置。運用自行編寫的仿真程序,可以直觀地觀察到支撐裝置的運動情況,為進一步研究該支撐裝置的動、靜態性能提供了條件。目前,該支撐裝置已經在所搭建的試驗平臺上調試運行,各個支撐臂完全能夠實現對工件的實時跟隨支撐。
[1]關雄飛,呼剛義.在復雜曲面零件數控加工中的宏程序設計[J].制造業自動化,2012,34(8):104-106.
[2]俞紅祥,張昱,潘旭華.曲軸新型非圓隨動磨削運動模型的研究[J].機械工程學報,2011,47(13):167-174.
[3]Iksha kumari , A.M.Magar . DXF FILE EXTRACTION AND FEATURE RECOGNITION [J]. International Journal of Engineering and Technology,2012, 4(2):93-96.
[4]Online help AutoCAD2010[M],Autodesk Inc.
The mechanical design and the motion analysis of noncircular rotating workpiece support device
YUE Yan-fang, XIN Zhi-bo, YANG Guang
針對非圓弱剛性工件旋轉加工必須安裝中間隨動支撐的要求,設計了一種 “V”型支撐裝置,研究了帶有負曲率的非圓截面CAD圖形驅動自動生成支撐臂瞬態位移的計算方法,并據此編寫了支撐裝置運動控制程序,搭建了試驗系統。實驗證明該系統完全能夠保證對任意非圓工件旋轉隨動支撐的連續性、實時性與平穩性。
弱剛性;非圓截面;中間支撐裝置;運動學分析
岳彥芳(1957 -),男,石家莊人,教授,工學博士,主要研究方向為制造執行系統與制造業信息化。
TP23
A
1009-0134(2014)05(下)-0140-03
10.3969/j.issn.1009-0134.2014.05(下).40
2014-02-27
河北省應用基礎研究計劃重點項目:大型風電葉片整體成型基礎研究(12932146D)
