基于視覺的裝配機器人精確定位研究
2014-05-11 03:10:14劉振國曹云翔劉曉楠唐海林
制造業自動化 2014年10期
關鍵詞:系統
郭 瑞,劉振國,曹云翔,劉曉楠,唐海林
(北京機械工業自動化研究所,北京 100120)
基于視覺的裝配機器人精確定位研究
郭 瑞,劉振國,曹云翔,劉曉楠,唐海林
(北京機械工業自動化研究所,北京 100120)
0 引言
裝配機器人在制造業中占有越來越重要的地位,傳統的裝配機器人在自動化生產線上,只能執行固定的示教位置,機器人的抓取點固定,對定位工裝精度要求就很高,同時需要精心設計手爪及特殊輔助機構[1]。但在實際應用中,因工裝材料(如泡沫等)、加工工藝、工件本身精度以及為機器人手爪抓取工件預留的公差裕量等原因,使得抓取精度無法滿足精密裝配要求,視覺的引入可以使機器人根據工件的實際位置動態調整抓取點,實現裝配機器人精確定位和智能抓取[2]。
1 系統組成及通信方式
本文構建了一套以視覺為引導的機器人精密裝配系統,本系統由輸送線體、定位工裝、四軸機器人、專用電缸手爪和視覺系統等組成。相機采用移動式安裝,固定在機器人手爪上跟隨手爪移動,機器人手爪結構如圖1所示,兩臺相機平行安裝并且垂直于水平面,只用其中一臺相機定位。

圖1 機器人手爪結構示意圖
本系統通過PLC進行系統集成,實現系統控制,不同設備支持的通信協議(工業以太網、PROFIBUS等)不同,具體的通信方式需要根據實際情況選擇。對于機器人與視覺系統的交互方式,主要有以下兩種:
1)機器人與視覺系統直接通信。機器人與視覺系統構建一個子系統,機器人直接獲取視覺系統的數據信息,PLC只與機器人通信,不再與視覺系統通信,當PLC需要視覺信息時,可經由機器人反饋獲取。該方式的優點是減少通信中間環節,使通信更加直接可靠。
2)機器人通過PLC與視覺系統間接通信。首先PLC把視覺系統傳送的數據信息進行分析,然后把機器人需要的信息轉發給機器人。該方式的優點是便于PLC分析視覺信息做出整體的控制調配。
本系統因需要進行工件定位、判斷有無、正反以及檢測等大量數據分析,所以選擇了第2種通信方式。
2 系統定位工作流程
系統定位工作流程如圖2所示。
3 精確定位關鍵技術
3.1 圖像處理
原始圖像質量的優劣直接影響著圖像數據分析的準確性,進而影響定位精度。在保證環境光源穩定、背光[3]調節適當的情況下,充分利用曝光調整、圖像預處理、圖像二值化處理、模型區域識別和特征點尋找等方法分析圖像信息。本例中工件為深棕色,嵌在泡沫工裝中,圖3為圖像二值化處理的效果。

圖2 系統定位工作流程圖
3.2 坐標系標定
視覺系統從拍攝的圖片中提取出來的信息為像素點信息,在保證相機視野和機器人法蘭都在水平面的前提下,視覺系統的二維坐標系需要轉換成機器人的二維坐標系,轉換的過程即為坐標系標定。視覺系統的像素點坐標為當前物距下的坐標,而機器人坐標為機器人法蘭中心點的坐標。


圖3 圖像二值化處理效果圖
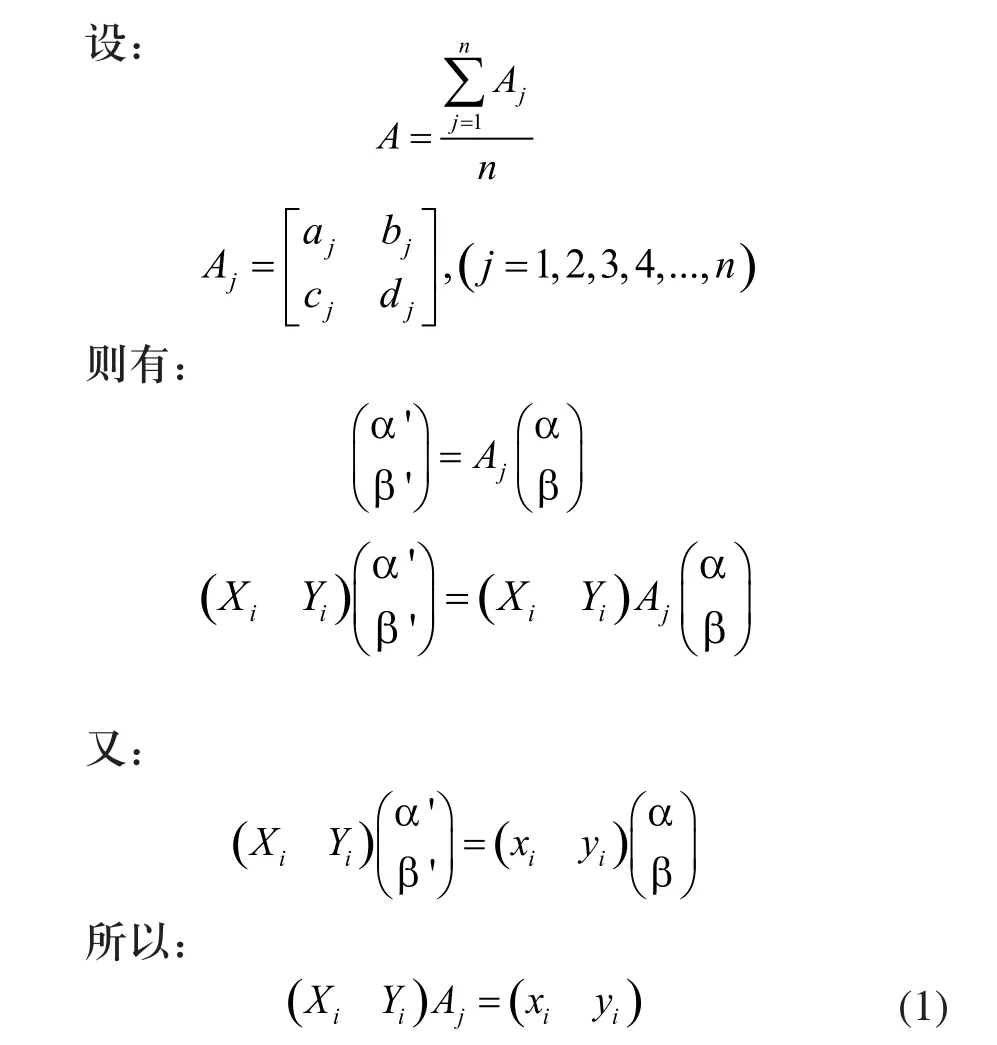
從上推理可知,將任意兩組視覺系統坐標系和機器人坐標系的坐標值帶入式(1)即可求出Aj,然后采集n組Aj得到A,理論上n越大,得到的A越精確。
至此,視覺系統中任意像素點坐標已經轉換為機器人X、Y軸坐標。

圖4 機器人手爪中心軸頂針對點
3.3 機器人抓取點獲取
坐標系標定完成后,相機視野內尋找的工裝或工件上的特征點均可以在機器人坐標系下給出坐標值,根據視覺系統坐標系下特征點的坐標值,進行抓取點x、y軸坐標值和角度補償計算,然后再轉換為機器人坐標系下坐標值,模型如圖5所示。
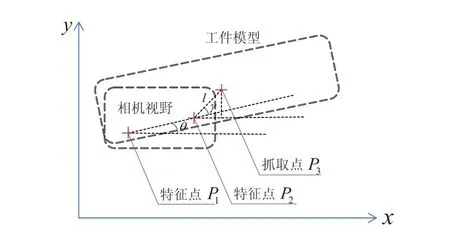
圖5 抓取點坐標值及角度補償計算示意圖
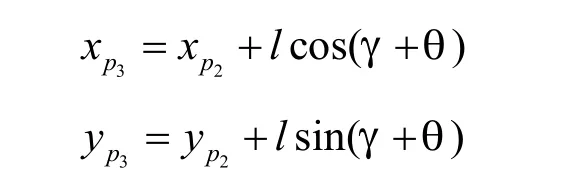

對于機器人手爪角度補償,因相機固定在手爪上且視覺系統坐標系x軸方向與手爪夾取方向平行,所以兩特征點連線與x軸方向的夾角即為機器人抓取角度的偏移量補償,設拍照點機器人R軸(機器人法蘭旋轉軸)角度坐標值為φ,機器人抓取點角度值為λ。則有:

4 結論
通過視覺系統對工件的精確定位,引導機器人智能抓取,較好的解決了定位工裝達不到精度要求的問題,提高了設備的智能化水平和容錯性能力。經過視覺算法的反復驗證,視覺系統與機器人之間的坐標系標定和抓取點坐標值計算可靠有效,工件的抓取精度和穩定性可以保證。
[1]張建中,何永義,李軍.機器人裝配視覺定位研究[J].機電工程,2011,28(8):934-937.
[2]王修巖,程婷婷.基于單目視覺的工業機器人智能抓取研究[J].機械設計與制造,2011,5:135-136.
[3]顧寄南,樊帆,關號兵,陳艷,沈巍.上下料機器人視覺控制系統的研究[J].機械設計與制造,2013,8:150.
Research on assembly robot accurate positioningbased on vision
GUO Rui, LIU Zhen-guo, CAO Yun-xiang, LIU Xiao-nan, TANG Hai-lin
為適應越來越高的自動化裝配精度要求,以視覺為引導的機器人裝配系統更多的被應用,本文闡述了機器人精密裝配系統的系統集成、設備通信的實現方式,介紹了圖像處理一般方法,設計了視覺系統到機器人的坐標系標定及坐標值計算,實現了視覺系統對機器人精確定位的智能引導。
視覺;裝配機器人;精確定位;圖像處理;坐標系標定
郭瑞(1988 -),男,山東臨沂人,碩士,研究方向為工業自動化系統集成。
TQ116.2
A
1009-0134(2014)05(下)-0154-03
10.3969/j.issn.1009-0134.2014.05(下).44
2014-04-21
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
