基于SRD的升降橫移式立體車庫運行可行性分析
2014-05-25 02:52:04廖玲玲肖素梅肖湘菲
西南科技大學學報 2014年1期
廖玲玲,肖素梅,肖湘菲
(西南科技大學制造科學與工程學院 四川綿陽 621010)
立體車庫是根據物流系統中物料自動傳輸原理,利用多層高架式倉儲設備來存放車輛的一種大型停車設備。如何使立體車庫運行效率更高,車主等待時間更短[1]是當前研究立體車庫的重要課題之一。在目前市場上,小型車庫利用帶常閉式制動器的三合一減速電機作為動力源[2],電機做恒速運動,以犧牲車主等待時間為代價來減小運行始末的慣性沖擊。另有部分立體車庫引入了變頻調速,設定電機運行時的速度曲線[2],利用轉速開環恒壓頻比變頻調速或者利用轉速閉環滑差頻率控制轉矩[3]來調速,兩種調速方式都能獲得一個較平滑快速的車庫運行速度,避免產生過大的沖擊電流。變頻調速相對恒速運動,無疑提高了車庫的運行效率,但從表1的對比情況可以看出,變頻調速的優勢弱于開關磁阻電機調速系統,特別是在立體車庫這種低速轉運條件下,變頻調速成本較高、電機使用壽命較短。故本文提出利用開關磁阻電機取代目前常用的三合一減速電機、交流變頻調速技術,以電流、位置雙閉環控制取代現有電機的開環或單閉環控制,不但降低成本,也使得運動精度更高,并給出可行性分析。
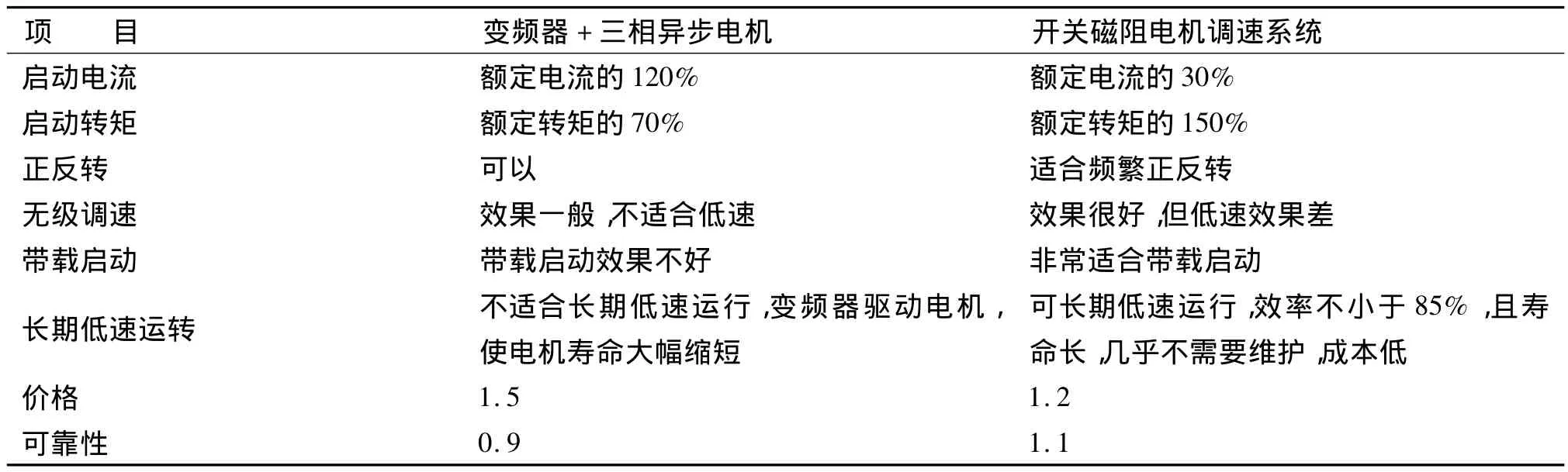
表1 變頻調速與SRD對比表Table 1 The com parison between Variable frequency and SRD
1 開關磁阻電機調速系統(SRD)
開關磁阻電機(Switched Reluctance Motor SRM)采用雙凸極鐵心結構,轉子上既無繞組也無永磁體,結構簡單堅固。其利用磁阻最小原理,即磁通總是沿磁阻最小的路徑閉合,當轉子軸線與定子磁極軸線不重合時,轉子將在磁阻力的作用下產生轉矩使其趨于磁阻最小的位置,從而驅動轉子旋轉[4]。
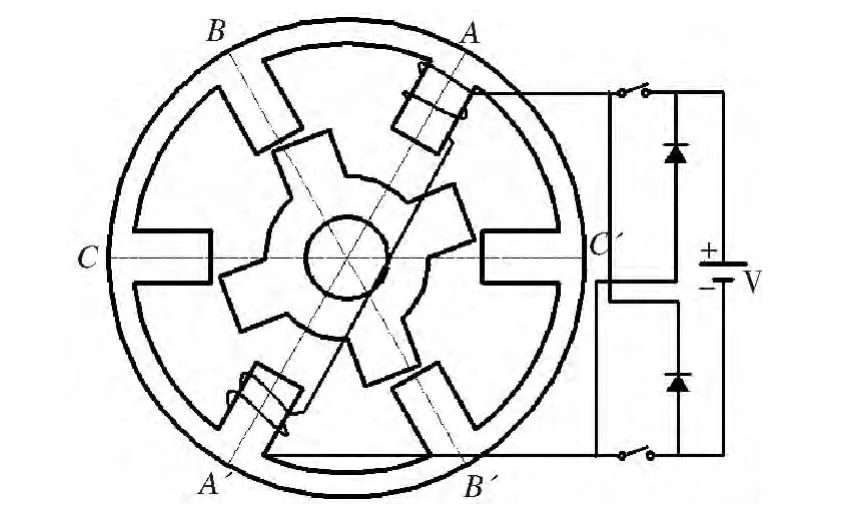
圖1 三相6/4開關磁阻電機結構(其中一相)Fig.1 The structure of Three - phase 6/4 SRM(Only one phase)
開關磁阻電機調速系統(Switched Reluctance Driver,SRD)則是由開關磁阻電機(SRM)、功率變換器、反饋采樣環節和控制器組成的機電一體化的機電能量轉換系統,其工作流程如圖2所示。
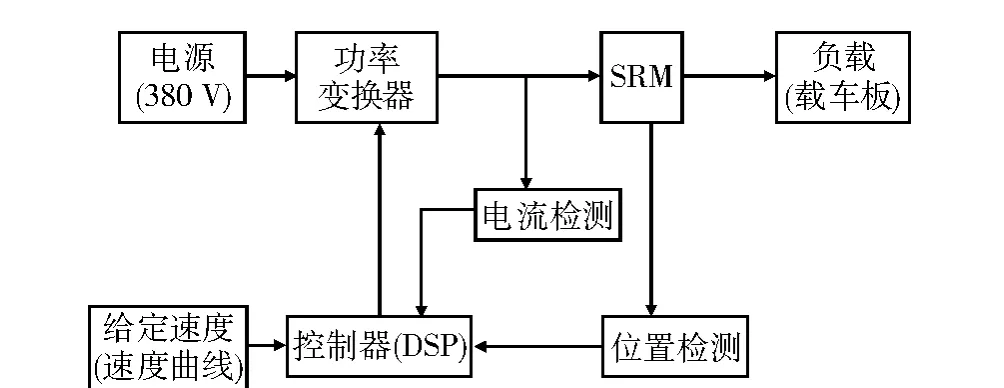
圖2 SRD工作流程Fig.2 The Engineering process of SRD
SRM是實現機電能量轉換的部件,也是區別于其他電動機調速系統的主要標志。功率變換器提供SRM運行所需要的能量,一般是蓄電池或交流經整流后得到的直流電。采樣反饋環節包括轉子位置檢測和相電流檢測。控制器是整套系統的核心,處理反饋信息,計算轉速,然后發出控制信號給功率變換器,實現功率變換器對開關磁阻電動機的驅動。
2 開關磁阻電機數學模型

式中,U,i,R依次為電機定子相電壓、相電流和相電阻;θ為電機轉子與定子的相對位置角;Ψ(i,θ)為電機定子的相繞組磁鏈。式(1)中,定子各相繞組端電壓等于電阻壓降和因磁鏈變化而產生的感應電勢
開關磁阻電機基本方程為[4-5]之和。開關磁阻電機定子由硅鋼片制成,電阻較小,若忽略相電阻R時,則式(1)可簡寫為:

其中:

式(3)中,SRM磁鏈Ψ(i,θ)是一個關于繞組相電流和轉子位置角的函數。而SRM在電磁轉矩Te和負載轉矩TL作用下的轉子機械運動方程為

(4)式中,J,β分別為 SRM轉動慣量和摩擦因數。
3 立體車庫電機仿真模型
3.1 立體車庫電機選擇
國內市場上的升降橫移式立體車庫橫移速度6~8 m/min,一個車位跨度2 m左右,則橫移時間約19 s,而升降速度為4~5 m/min,按平均層間距1.8 m計算,一層所需升降時間約21 s,隨著層數的增多,升降時間所需更多,當有兩名及兩名以上車主進行存取車,則后到車主的等待時間則會更長。一般升降橫移式立體車庫不超過五層,以每層1.8 m計算,升到頂層有7.2 m,故在升降方向將現有的電機換成開關磁阻電機,并引入其相應的調速系統。而車位橫移時,載車板下的4個滾輪沿導軌轉動,移動速度較快,且每次橫移只需移動一個車位寬度的距離,橫移時間較短,采用恒速電機驅動也不會占用過多時間,為節省成本,橫移電機無需換成開關磁阻電機。
立體車庫的升降運動是通過鏈傳動來提升載車板實現的。考慮傳動中各部件的效率如下:鏈傳動效率 η鏈=0.97,軸承效率 η軸承=0.99,齒輪效率 η齒=0.97,則 η總=0.931。
現目前,載車板總重量m載≈500 kg,容車規格一般m容車≤1 800 kg,則可得升降需要的拉力F>(m載+m容車)g,取 g=9.8 m/s2,故F>22 540 N。
為提高立體車庫的運行效率,利用開關磁阻電機良好的調速性能,將立體車庫的升降運行速度提高1.5 倍,則取升降速度v=7.2 m/min,即v=0.12 m/s,同時考慮傳動中的各種摩擦阻力,使載荷增大10%,則電機的額定功率:

選用6/4三相開關磁阻電機,額定功率4 kW。根據開關磁阻電機參數設計經驗值[4],電機額定功率4 kW時,電子轉子直徑約30 mm,額定轉速:

根據開關磁阻電機額定轉矩計算[4-5]:

考慮傳動中的各種摩擦,則阻力轉矩為:

故Tem>TL,所選電機完全可行。
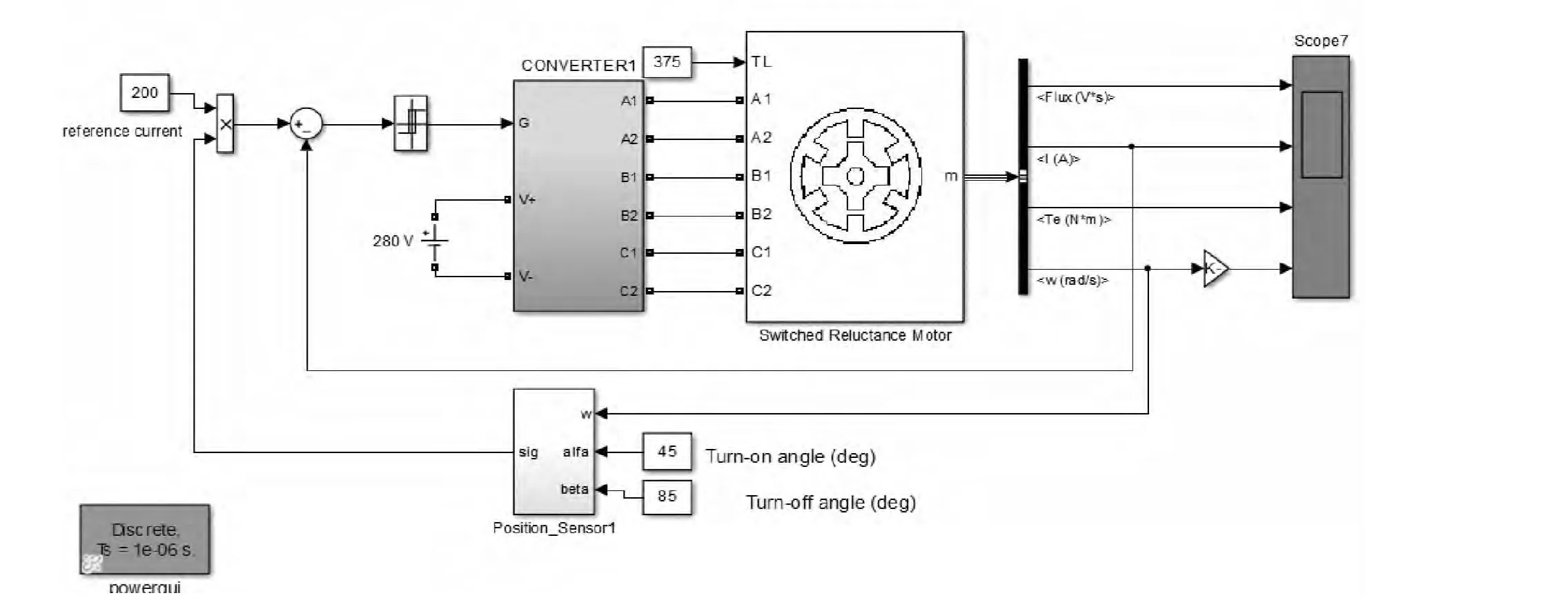
圖3 SRD仿真模型Fig.3 The simulationmodel of SRD
3.2 建立電機仿真模型
根據文獻[4-5]中開關磁阻電機尺寸參數設計相關經驗數據,利用Ansoft軟件中Rmxprt建立三相6/4開關磁阻電機有限元模型[6],得到電機的磁化曲線等非性線數據如圖4所示。
圖4 6/4開關磁阻電機磁鏈曲線Fig.4 The flux curve of 6/4 SRM
根據Ansoft計算結果,在Matlab 2010b Simulink中找到 SimPowerSystems庫下的Machines,找到開關磁阻電機(Switched reluctantmotor)模型,雙擊該模型,將設置參數選用 6/4,Generic modle[7],其中,電機參數設置項中最大電流為480 A,最大磁鏈為1.804 2 V·s。
3.3 仿真結果
仿真電機帶載,初速度為0的加速與設計速度8 rad/s的減速過程,仿真時間為2 s,電機加速曲線如圖5所示,在1 s時,速度已達到穩定,在小范圍8~10 rad/s內波動,加速過程較快。電機轉矩亦有所波動,如圖6所示。減速過程如圖7所示,在0.9 s時,速度已減為零,而此時間內轉矩與加速過程類似,阻力轉矩上下波動,如圖8所示。
圖5 開關磁阻電機加速曲線Fig.5 The acceleration curve of SRM
圖6 開關磁阻電機加速轉矩波動曲線Fig.6 The acceleration torque fluctuation curve of SRM
圖7 開關磁阻電機減速曲線Fig.7 The deceleration curve of SRM
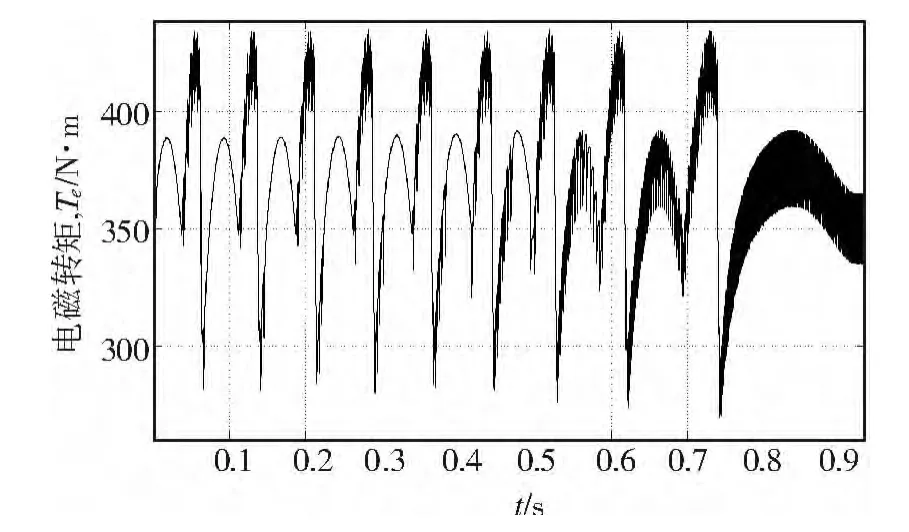
圖8 開關磁阻電機減速轉矩波動曲線Fig.8 The deceleration torque fluctuation curve of SRM
4 結論
經仿真分析,開關磁阻電機調速系統調速性能良好,電機響應快速。在立體車庫載車板停車條件下,SRD能快速完成升降過程中的加減速過程,達到設計提升現有速度1.5倍的預期效果,即SRD作為升降橫移式立體車庫動力源完全可行。但電機的速度、轉矩波動較大,可能會造成立體車庫運行過程中的振動。故根據此次仿真結果,在后期工作中應注重電機控制策略的優化。 找到適合立體車庫運行的控制策略,如針對開關磁阻電機的模糊控制技術[8]、直接瞬時轉矩控制(Direct Instantaneous Torque Control簡稱 DITC)[9]等,以減小轉矩波動,使車庫在實際運行中快速平穩,安全性能更好。
[1]付翠玉,關景泰.立體車庫發展的現狀與挑戰[J].機械設計與制造,2005,9(9):156.
[2]董冬,郭佑民,辜琳麗.基于 PLC與變頻器結合的立體車庫電機控制系統的研究[J].機電技術,2011,(5):92-94.
[3]劉增高.立體車庫電機控制系統的研究[D].天津:天津理工大學,2008.
[4]吳建華.開關磁阻電機設計與應用[M].北京:機械工業出版社,2000.110 -128.
[5]吳紅星.開關磁阻電機系統理論與控制技術[M].北京:中國電力出版社,2010.2 -87.
[6]李浩.開關磁阻電機的性能分析及其優化設計方法研究[D].天津.河北工業大學,2010.
[7]程勇.基于 Matlab開關磁阻電機模型的調速系統仿真[J].煤礦機電,2011,(5):29 -33.
[8]HOANG L H.A versatile nonlinear switched reluctance motor model in Simulink using realistic and analytical magnetization characteristics[J].IEEE Electrical and Computer Engineering,2005,1556 -1561.
[9]吳紅星,趙哲.抑制開關磁阻電動機轉矩波動控制方法綜述[J].微電機,2010,(43):78-84.
[10]王廣洲.開關磁阻電機低速階段轉矩脈動抑制的研究[D].西安:西安科技大學,2012.
