基于ADAMS/RAIL的直線電機徑向轉(zhuǎn)向架曲線通過性能分析
2014-05-30 05:19:12
裝備機械 2014年1期
關(guān)鍵詞:轉(zhuǎn)向架模型
0 前 言
20世紀90年代以后,城市軌道交通在我國大中型城市迅速發(fā)展,各種先進的地鐵轉(zhuǎn)向架開始陸續(xù)引入國內(nèi)市場。其中,廣州、北京已經(jīng)先后開始建設(shè)和運營直線電機軌道交通系統(tǒng)。這種系統(tǒng)具有車型小、爬坡能力強、曲線通過能力優(yōu)等特點,特別適合于具有特殊線路條件城市發(fā)展軌道交通的需要,因此對其曲線導向能力的研究,有利于提高城市軌道運營維護水平,對交通制式合理選型和規(guī)劃具有積極推動作用。
1 直線電機軌道交通系統(tǒng)概述
從1985年加拿大多倫多開通第一條直線電機軌道交通系統(tǒng)至今,已在5個國家建成11條線路,總里程超過200km。在國外,擁有直線電機地鐵技術(shù)的主要有加拿大龐巴迪以及日本川崎、日立三家公司,龐巴迪公司的技術(shù)已經(jīng)應(yīng)用到多個國家。加拿大溫哥華市的skytrain系統(tǒng)是運用直線電機車輛的典范,到2002年底,龐巴迪公司為該系統(tǒng)制造的MK系列車輛已成功、可靠運行10億公里。開發(fā)直線電機車輛的國家還有日本,日本在引進skytrain技術(shù)的同時,開發(fā)了東京12—000、大阪70等系列車輛。在我國,廣州地鐵4、5號線則首次采用直線電機軌道交通系統(tǒng)。
目前,直線電機軌道交通系統(tǒng)中的直線感應(yīng)電機的額定功率都不高(100~200kW),與感應(yīng)板之間的氣隙約8~13mm。由于直線電機軌道交通系統(tǒng)每臺轉(zhuǎn)向架下只能裝一臺電機,單車功率與旋轉(zhuǎn)電機地鐵相距甚遠(2×180~220kW/轉(zhuǎn)向架),因此目前都采用全動車編組。其車體一般采用整體承載式大型鋁合金擠壓型材或不銹鋼,重量可比碳素鋼降低30%~35%,車輛定距和軸距都不大,屬于中等運量。直線電機軌道交通系統(tǒng)主要采用第三軌供電(約占55%)和架空接觸供電(約占45%),供電電壓分為DC750V和DC1500V。
由于是非粘著的驅(qū)動方式,直線電機軌道交通系統(tǒng)具有如下特點:
(1)可以實現(xiàn)徑向曲線通過;
(2)爬坡性能優(yōu)良;
(3)建筑成本小;
(4)噪聲低。
由于城市軌道交通大都建在市區(qū),線路曲線半徑小,因此,良好的曲線通過性能是評價系統(tǒng)優(yōu)劣的重要指標之一。本文以廣州市軌道交通4、5號線引進的直線電機BM3000型車輛為研究原型,研究車輛在有無導向機構(gòu)下的曲線動力學性能。
2 BM3000型轉(zhuǎn)向架簡介
BM3000型直線電機徑向轉(zhuǎn)向架是龐巴迪(Bombardier)公司設(shè)計的產(chǎn)品。BM3000轉(zhuǎn)向架采用自導向徑向轉(zhuǎn)向架設(shè)計來滿足廣州4、5號線小曲線半徑的要求。BM3000型直線電機徑向轉(zhuǎn)向架 如圖1所示。
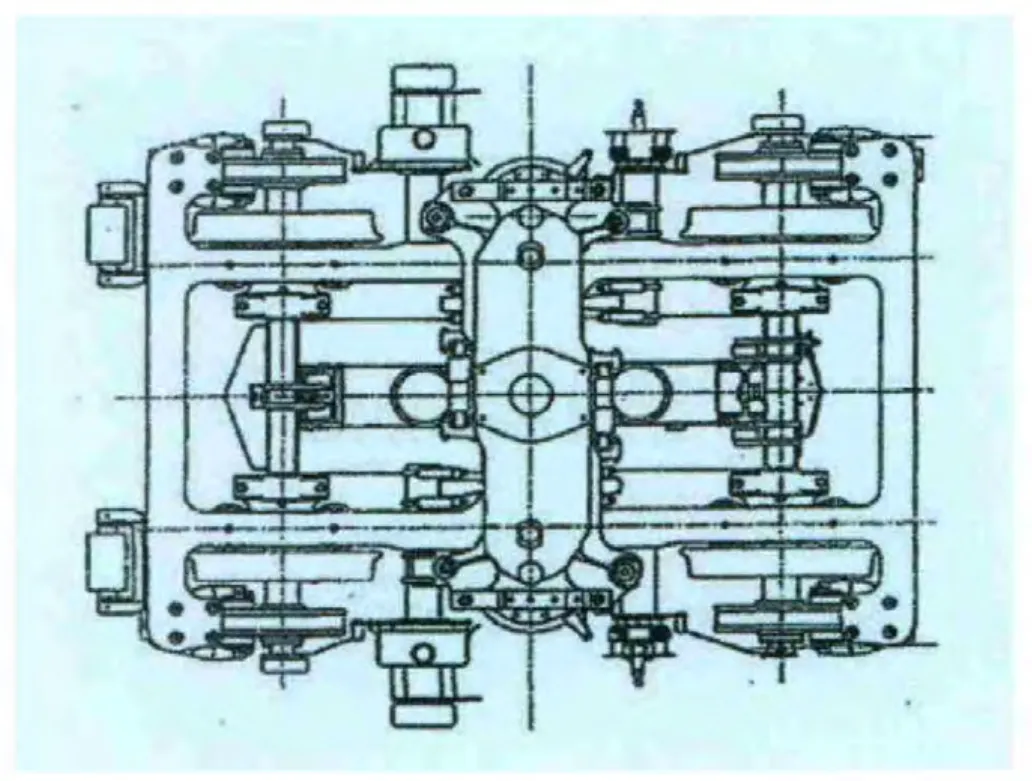
圖1 BM3000型轉(zhuǎn)向架示意
轉(zhuǎn)向架構(gòu)架采用內(nèi)置方式的焊接鋼結(jié)構(gòu),降低自重。輪對采用整體碾鋼輪。軸箱體采用鋁合金制造。每個軸箱采用兩個圓錐螺旋形橡膠彈簧,二系懸掛位于轉(zhuǎn)向架構(gòu)架和搖枕之間。
直線感應(yīng)電機懸掛于BM3000轉(zhuǎn)向架的橫跨于輪對軸箱的支撐梁上。每個支撐梁支撐在左右兩個軸箱上,直線電機屬于簧下質(zhì)量。支撐梁兩端配備橡膠關(guān)節(jié),提供電機定子一定的彈性,降低其運行時的振動,滿足轉(zhuǎn)向架在允許范圍內(nèi)的彎曲和扭曲。直線電機懸掛在支撐梁的吊臂上,吊臂焊接在支撐梁上,1位輪對支撐梁設(shè)三個吊臂,2位輪對支撐梁設(shè)兩個吊臂,形成直線電機的5點懸掛。直線電機的運動通過吊臂傳遞給直線電機連接節(jié)點。牽引力和制動力通過牽引桿傳遞到構(gòu)架,再通過中心牽引裝置由搖枕傳遞到車體。
3 系統(tǒng)仿真模型介紹
本系統(tǒng)模型采用A DA M S軟件搭建,其中,ADAMS/Rail(鐵道模塊)是由美國MDI公司、荷蘭鐵道組織(NS)、Delft工業(yè)大學以及德國ARGECARE公司合作開發(fā)的,專門用于研究鐵路機車、車輛、列車和線路相互作用的動力學分析軟件。ADAMS/Rail可以方便快速地建立完整的、參數(shù)化的機車車輛或列車模型以及各種子系統(tǒng)和線路模型,并根據(jù)分析目的不同而定義相應(yīng)的接觸模型,可以進行機車車輛動力學等問題的研究。
3.1 車體模型
模型以不帶司機室的B車為模板,并將車體看作剛體,分別設(shè)置車體的長、寬、高,其主要技術(shù)參數(shù)為:
車體長×寬×高 16 840mm×2 890mm×3 625mm
地板高度 930mm
軸重≤13t
建成后的車體模型如圖2。
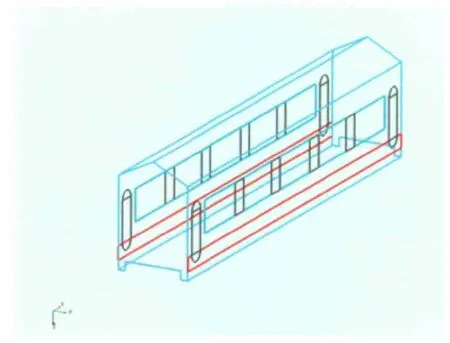
圖2 車體模型示意
3.2 直線電機轉(zhuǎn)向架模型
采用與實際直線電機定子結(jié)構(gòu)相同的等效方形板來近似模擬直線電機的電磁力激勵,其質(zhì)量、質(zhì)心位置、轉(zhuǎn)動慣量均與實際電機定子相符。方形板端部分別與左右軸箱采用橡膠彈性元件聯(lián)接,模擬實際的支撐梁與軸箱的橡膠關(guān)節(jié),并設(shè)置一定的橫向自由度,允許直線電機有少量的橫向位移。
直線感應(yīng)電機懸掛于橫跨于輪對軸箱的支撐梁上。每個支撐梁支撐在左右兩個軸箱上。直線電機懸掛在支撐梁的吊臂上,吊臂焊接在支撐梁上,視為剛性連接,共有5個吊臂,形成直線電機的5點懸掛。
添加直線電機后的轉(zhuǎn)向架模型見圖3。
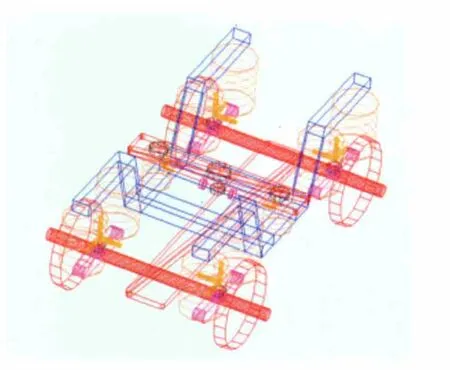
圖3 直線電機轉(zhuǎn)向架模型示意
3.3 轉(zhuǎn)向架導向機構(gòu)模型
徑向轉(zhuǎn)向架的設(shè)計思路即盡量減小構(gòu)架對輪對的搖頭約束,使前、后輪對通過蠕滑作用或相應(yīng)導向機構(gòu)的調(diào)節(jié)作用,確保其在通過曲線時趨于徑向位置,同時還應(yīng)避免對車輛橫向穩(wěn)定性產(chǎn)生的不利影響。
按照導向原理的不同,徑向轉(zhuǎn)向架可分為自導向徑向轉(zhuǎn)向架和迫導向徑向轉(zhuǎn)向架。
廣州地鐵4、5號線使用的BM3000型直線電機徑向轉(zhuǎn)向架本身并沒有導向機構(gòu),在本文中,先后建立了自導向、迫導向型式的機構(gòu)。
自導向徑向轉(zhuǎn)向架的導向機構(gòu)結(jié)構(gòu)如下:在前后輪對輪軸上分別加上一個傳動桿件,傳動桿件為剛體,桿件和輪軸之間不限制相對旋轉(zhuǎn)(輪軸方向為軸),但限制輪軸與桿件間的橫向位移等自由度。在轉(zhuǎn)向架中部,兩個傳動桿件之間采用一個彈簧裝置連接,并在此處增加一個阻尼器。為了保證添加的桿件不影響轉(zhuǎn)向架的幾何特性,將傳動桿件的質(zhì)量、轉(zhuǎn)動慣量設(shè)置為很小的數(shù)值。中間的彈簧、阻尼質(zhì)量不計。
經(jīng)多次分析比較,初選自導向機構(gòu)的主要結(jié)構(gòu)參數(shù)見圖4。
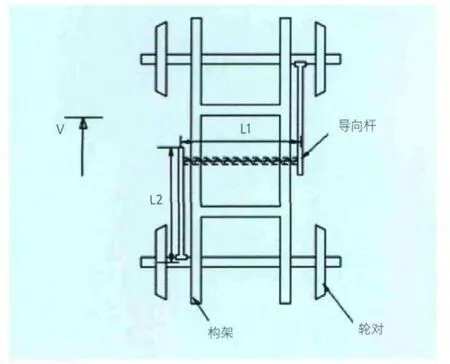
圖4 自導向轉(zhuǎn)向架模型
迫導向機構(gòu)由6根導向桿組成,分別與前后輪對輪軸及車體相連。各導向桿間為鉸接,橫向布置的導向桿通過中心銷裝置與構(gòu)架相聯(lián),并不限制橫向?qū)驐U與構(gòu)架的相對旋轉(zhuǎn)。
導向桿的實際布置型式見圖5。
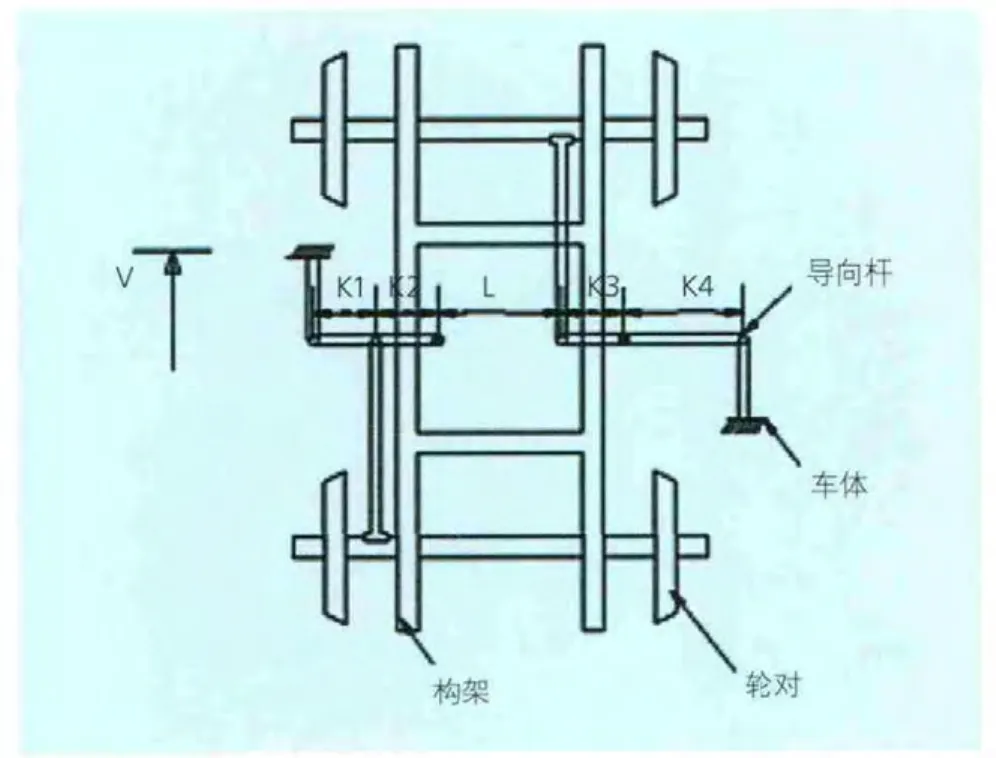
圖5 迫導向轉(zhuǎn)向架模型
3.4 線路模型
線路由直線段、緩和曲線段和圓曲線段所組成。直線和圓曲線通過緩和曲線平滑地連接。曲率可以采用沿線路展開距離的函數(shù)來表示。ADAMS/RAIL采用三次拋物線方程自動數(shù)值擬合出緩和曲線,立面線形設(shè)置采用直線型順坡模式。
仿真中采用的線路參數(shù)為線路全長400m:50m直線—50m緩和曲線—200m圓曲線—50m緩和曲線—50m直線;圓曲線半徑150m;圓曲線上超高值取120mm,緩和曲線上采用直線形超高變化。車輛曲線運行速度為勻速,通過速度V=50km/h。
4 曲線通過動力學性能分析
模型計算參數(shù)選用上廣州4、5號線車型數(shù)據(jù)作為參考,對無導向機構(gòu)、自導向、迫導向轉(zhuǎn)向架車輛的曲線通過性能指標進行仿真研究,并依據(jù)GB5599-85進行評定。
4.1 輪對橫向位移對比
各種導向型式直線電機車輛的一位輪對橫移量變化趨勢相同,且數(shù)值變化較小,這主要是由于仿真模型中所添加的導向機構(gòu)主要作用于輪對的縱向,對橫向參數(shù)影響較小(見圖6)。
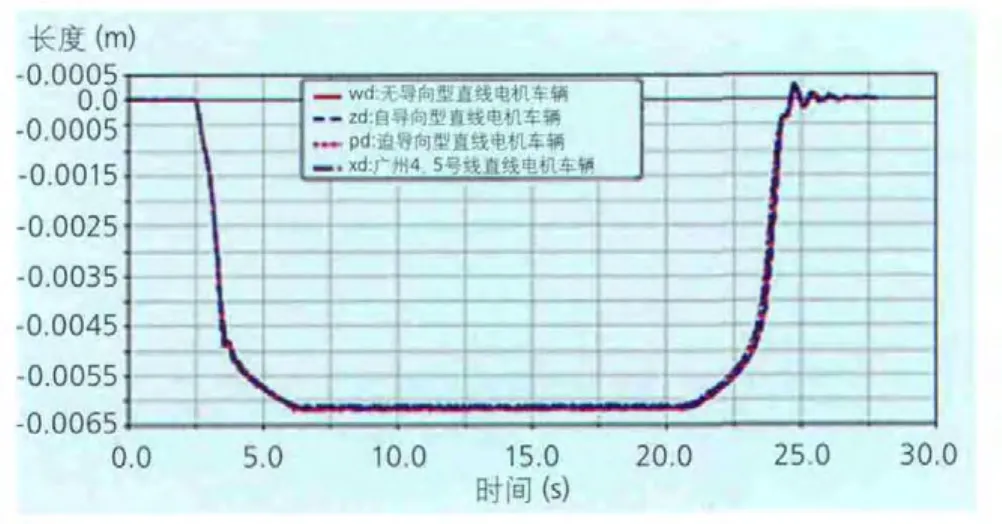
圖6 一位輪對橫向位移比較
4.2 輪對橫向力對比
在進入緩和曲線的過程中,自導向型式直線電機車輛較無導向機構(gòu)直線電機車輛略小,在進入圓曲線后,二者數(shù)值基本相等;迫導向型式直線電機車輛由于采用導向桿鉸接方式,剛度值較大,因而引起輪對橫向力大幅增加(見圖7)。
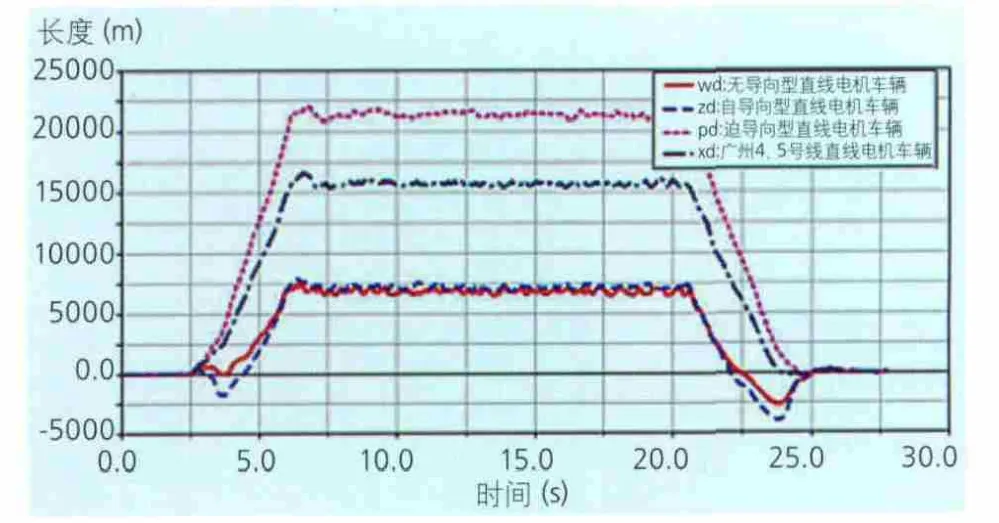
圖7 一位輪對橫向力比較
4.3 輪對沖角對比
在進入圓曲線后,無導向型式直線電機車輛1位輪對沖角值為0.13°左右,自導向型式直線電機車輛較無導向型式直線電機車輛略小,數(shù)值大約為0.12°,迫導向直線電機車輛超過輪對徑向位置(見圖8)。
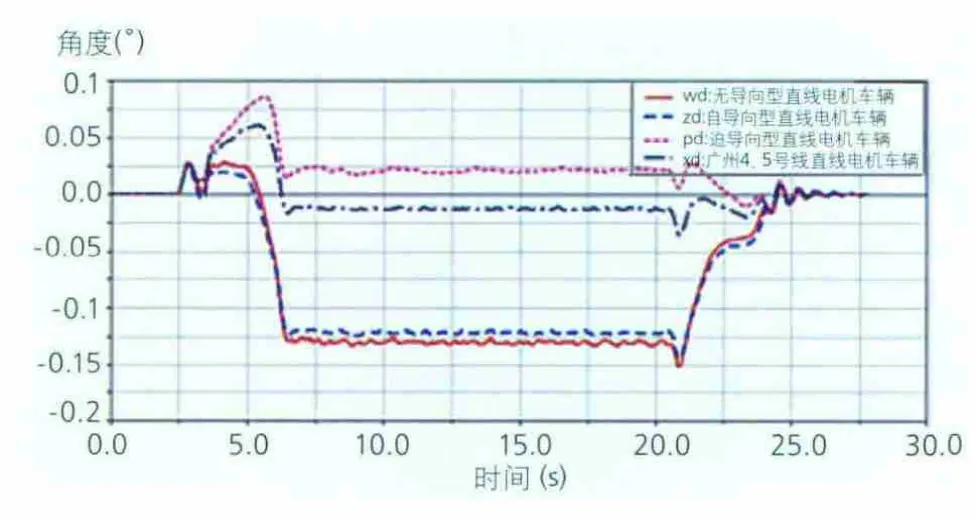
圖8 一位輪對沖角比較
4.4 輪對脫軌系數(shù)對比
無導向、自導向型式直線電機車輛脫軌系數(shù)變化不大,其值在0.25附近,迫導向型式直線電機車輛一位輪對左輪脫軌系數(shù)增大至0.3,各值均在允許范圍內(nèi)(見圖9)。
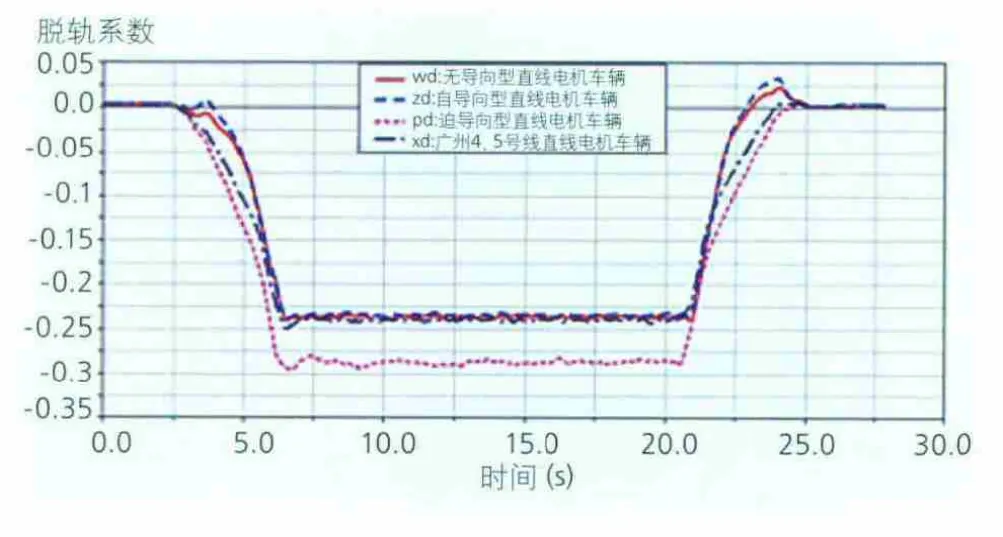
圖9 一位輪對脫軌系數(shù)比較
4.5 輪對輪重減載率對比
進入圓曲線后,無導向型式直線電機車輛輪重減載率約為0.2;由于自導向機構(gòu)主要在橫向位置起作用,因而自導向型式直線電機車輛該位置輪重減載率變化不明顯,其值也在0.2附近;迫導向型式直線電機車輛輪重減載率則大于0.3,各值均未超過允許范圍(見圖10)。
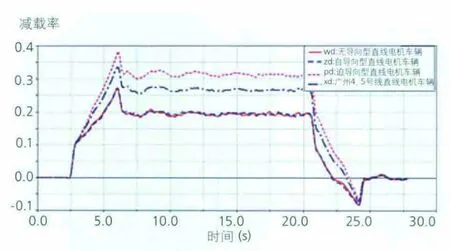
圖10 一位輪對輪重減載率比較
5 結(jié) 論
本文建立了常規(guī)無導向、自導向、迫導向直線電機車輛模型,并在ADAMS/Rail的平臺上對各種導向型式直線電機車輛曲線通過性能進行了仿真分析,可以看出:
(1)自導向、迫導向型式直線電機車輛較常規(guī)無導向直線電機車輛曲線通過動力學性能指標有所提高,導向能力一定程度上得到改善;
(2)迫導向機構(gòu)對曲線通過導向性能影響非常明顯,但其控制精度往往受到連桿磨耗等因素的影響,需要注意調(diào)整和維護。
[1]張定賢.機車車輛軌道系統(tǒng)動力學[M].北京:中國鐵道出版社,1996.
[2]葉云岳.直線電機原理與應(yīng)用[M].北京: 機械工業(yè)出版社,2002.
[3]楊利軍.直線電機徑向轉(zhuǎn)向架車輛結(jié)構(gòu)及性能分析[J].上海鐵道大學學報,2000(2).
[4]馮雅薇,魏慶朝.直線電機輪軌交通系統(tǒng)安全性分析[J].中國安全科學學報,2004(8).
[5]張振生.直線電機城市軌道交通車輛綜述[J].變流技術(shù)與電力牽引,2003(4).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:24
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
制造技術(shù)與機床(2019年12期)2020-01-06 03:17:46
西南交通大學學報(2018年5期)2018-11-08 10:58:26
光學精密工程(2016年6期)2016-11-07 09:07:19
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年1期)2016-05-17 05:33:38
鐵道運營技術(shù)(2015年3期)2015-12-23 09:27:14
