面向機器人輔助遠程手術的遙操作主手研究
2014-05-31 01:40:50廖立閆志遠杜志江何史林陳廣飛周丹
中國醫療設備 2014年8期
廖立,閆志遠,杜志江何史林,陳廣飛,周丹
1.哈爾濱工業大學機器人技術與系統國家重點實驗室,黑龍江 哈爾濱150080;2.中國人民解放軍總醫院,北京 100853
0 前言
近年來,隨著計算機技術和機器人技術的不斷發展,醫療機器人開始不斷走進人們的視野。醫療機器人開始應用于醫療領域的各個方面,在很大程度上提高了人類的醫療技術水平。與沒有機器人協助的手術相比,有機器人輔助的手術具有很多優勢。首先,在手術過程中,機器人能在很大程度上消除醫生手部的顫動,極大地提高手術操作精度,對于需要精細操作的手術,能給醫生帶來很大的幫助。其次,由于機器人的參與,承擔了手術的一部分工作,能夠減輕醫生的手術工作強度。同時,通過醫生與機器人的配合,能在一定程度上提高手術質量。再次,機器人輔助手術使醫生與患者沒有距離限制,通過遠程手術,大城市里的醫生能夠很方便地為醫療條件較差的偏遠地區的患者提供手術。同時,在具有X射線輻射等手術環境中,通過機器人的協助,醫生不必在現場便能對患者進行診斷,避免了醫生長期待在射線環境中對身體的傷害[1-2]。
我國人口眾多,幅員遼闊,醫療資源分布不均,不同地區的醫療水平存在著較大的差異。機器人輔助遠程手術能夠很好地平衡不同地區的醫療水平差異,提高醫療資源的利用效率。在機器人輔助遠程手術中,醫生與患者的距離沒有限制,醫生在手術室中操作主端的操作器械,控制遠在千里之外的從端手術器械進行手術。機器人系統通過圖像和力反饋等信息,增加這種遙操作手術的臨場感。2001年,美國的Zeus主從遙操作醫療機器人系統完成了著名的“林白手術”,該手術是一項在美國和法國之間進行的遠程膽囊切除手術。“林白手術”的成功,驗證了遠程手術技術的可行性[3]。
遙操作主手是醫生與遠程手術端的交互接口,醫生通過操作主端的主手運動,控制從端裝有手術器械的從手運動,從而實現手術動作進行手術。它可以向操作系統傳送位姿、速度等多種信息,同時可以接收控制系統發來的力和力矩等環境信息,以便為操作者提供力覺臨場感,實現對機器人的有效干預和控制。因此,遙操作主手是機器人輔助遠程手術的重要設備,對手術成功與否起著關鍵作用[4-5]。本文設計了一款遙操作主手,具有操作靈活,工作空間大等特點。主手采用串并聯混合形式的構型,具有7個自由度,能實現位姿解耦,其中位置部分的3個自由度具有力反饋,能較大的增加遙操作的臨場感。同時,本文基于Internet搭建了遠程手術實驗平臺,實驗中從手能夠很好地跟隨主手運動,驗證了實驗系統的穩定性以及遠程手術的可行性。
1 主手結構設計
作為機器人輔助遠程手術的關鍵設備,遙操作主手結構設計要求主要有:① 能夠滿足需求的工作空間。針對不同的手術,手術空間大小不一,但主手的操作空間和從手的運動空間可以是一定的比例關系,可以放大也可以縮小。較大的主手工作空間,通過縮放更容易實現較精細的手術動作。② 操作靈活。要使主手操作靈活,則必須具備一定的自由度,增加冗余的自由度能夠提高主手的靈活性。③具備足夠的剛度。如果主手剛度不足,則會降低主從控制的運動精度,從而給手術帶來不利的影響。
主手的結構構型主要分為串聯和并聯兩種。串聯結構型主手,其工作空間相對較大,操作較靈活,但剛度相對較小。并聯結構型主手的主要優點是剛度大,但操作靈活性方面沒有串聯結構型那么好。本文綜合串聯和并聯結構的優點,設計了一種串并聯混合形式的主手,構型見圖1(a)所示。
如圖1a,主手由兩部分組成。前半部分是一個改進的Delta并聯機構,主要由靜平臺、主動桿、被動桿和動平臺組成。后半部分是一個四軸匯交的串聯機構。串聯機構的軸線與并聯機構的動平臺固連。從運動的角度分析,前半部分的并聯機構實現主手的位置變化,當機構運動時,圖中主手的動平臺能實現平動。后半部分的串聯機構實現主手末端的角度變化。由于串聯機構的軸線匯交于一點,位置變化和姿態變化互不干涉,從而實現了位姿解耦,給運動和控制帶來了很大的方便。此外,主手并聯部分具有3個自由度(實現位置變化),串聯部分具有4個自由度(實現角度變化)。很顯然,串聯部分具有一個冗余自由度,這在一定程度上增加了主手的操作靈活性。
圖1b為本文設計的遙操作主手結構圖。圖中,主手并聯部分的主動桿為扇形盤,與電機通過鋼絲繩組成繩輪驅動機構,不僅能實現電機減速,同時還能放大電機力矩。并聯部分有3個電機,在實現位置運動3個方向重力平衡的同時,還能給遙操作手術提供力反饋。串聯部分的末端具有一夾持機構,用于手術中的夾持動作。串聯部分的末端三個桿件中都有一個電機,通過電機和配重實現末端的重力平衡。整個主手具有7個自由度,另加一個夾持自由度。主手的工作空間為200 mm×200 mm×200 mm,主手操作靈活,并具有3個自由度的力反饋。
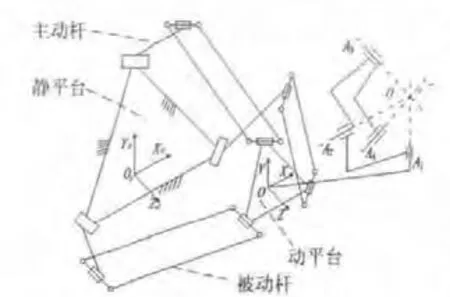
圖1 (a)主手構型圖
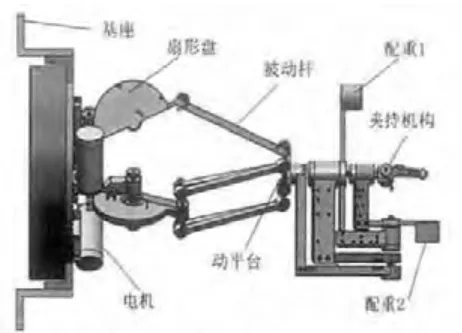
圖1(b)主手結構圖
2 控制系統設計
主手的控制系統結構框圖,見圖2,控制系統的設計采用分級結構。上位機用于進行各種計算,如主手正逆運動學、力反饋力矩求解和重力補償力矩的求解等。利用C++中的MFC庫編寫人機交互界面,以顯示主手的位置和姿態,電機的轉速和力矩等信息。下位機采用Elmo驅動器驅動電機動作,同時接收傳感器的信號,完成閉環控制。主手共有7個電機,前3個電機對應3個平移自由度,采用光電開關檢測零位。最后1個盤式電機對應夾持自由度,中間3個電機對應姿態部分的旋轉自由度,這4個電機對應的關節均采用光纖傳感器檢測零位。圖2中的7個驅動器組成了一個網絡控制系統,每個驅動器對應一個電機,每個驅動器都有一個不同的ID號,上位機發送指令時都有一個對應的ID號,只有ID號相同的驅動器才能接收指令從而進行相應的動作。上位機與下位機之間通過CAN總線通訊。CAN總線與上位機通過USB口連接,與驅動器通過CAN口連接。驅動器接收到光纖傳感器和光電開關的信息,再根據上位機的指令對相應的編碼器進行歸零操作。
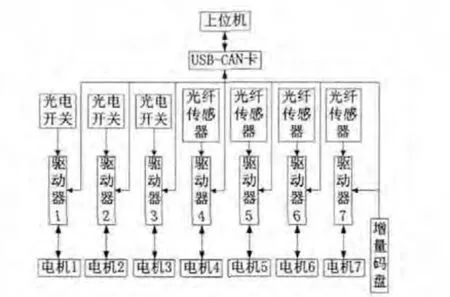
圖2 控制系統結構框圖
3 遙操作實驗
在機器人輔助遠程手術中,一個較大的問題就是存在時間延時,而且這種延時是一直變化的。變時延的存在給機器人輔助遠程手術帶來了很多問題。首先,當存在變時延時,主操作端產生一個動作,遠端手術器械的動作就會產生一個滯后,顯然不利于手術的正常進行;其次,變時延的存在還會使系統變得不穩定,甚至導致遠端手術器械產生誤操作;此外,變時延會使手術過程中視頻圖像的傳輸產生滯后,這嚴重降低了手術操作的臨場感。基于Internet的遠程手術,不僅存在變時延,還存在數據丟包的問題。這就會使遠端接收到的信息不完整,給手術帶來不利的影響[6-8]。
為了驗證主手系統的穩定性以及遠程手術的可行性,本文在真實的網絡環境下進行了遙操作實驗。
3.1 遙操作實驗平臺搭建
機器人遠程手術系統主要由三部分組成:主操作端、通信網絡和遠程手術端。主操作端一般包含遙操作主手,視頻顯示設備等;通信網絡能夠在主從兩端進行信息傳輸,發送主端的操作命令給從端,并接收從端返回的信息;遠程手術端則為相應的手術操作裝置,比如腦外科手術機器人、腹腔鏡手術機器人等。
同樣的,本文所進行的遙操作實驗跟機器人遠程手術系統類似。實驗中,主操作端采用本文設計的遙操作主手,從操作端采用與其前3個自由度同構的從手。通信網絡則采用基于ATM技術的教育網。ATM指的是異步數據傳輸方式,是一種以信元為基礎的分組交換復用技術。ATM技術不僅具有很高的帶寬,而且有很強的擴展性,這能夠使網絡時延保持一定的穩定性。同時,ATM技術還具有很高的實時性,很適合視頻和語音信息的傳輸,在機器人輔助遠程手術中有很好的應用前景。著名的“林白手術”就是使用基于ATM技術的網絡完成的[3]。
在本文的遙操作實驗中,主操作端和遠程手術端采用“客戶端-服務器”模型。由于受到地域的限制,本文的客戶端和服務器端均在本地(哈爾濱工業大學),分別將本地的兩臺主機設置成客戶端和服務器端。將北京航空航天大學的一臺主機作為遠端信息中轉站。在實驗過程中,將遙操作主手的位置信息,通過客戶端發送到遠端信息中轉站(北京),信息中轉站接收到信息后馬上返回給本地(哈爾濱)的從端,此時從端就相當于遠程手術端。通過這樣的方式,不僅擺脫了地域的限制,而且主手的信息通過主端到從端經過了雙向的網絡延時,更能檢驗系統的穩定性。
此外,本文的實驗采用視頻軟件對從端從手的運動進行視頻傳輸,這樣便能在客戶端的主機屏幕上看到從手的運動視頻,這跟實際的遠程手術是一樣的。整個實驗的操作流程,見圖3。
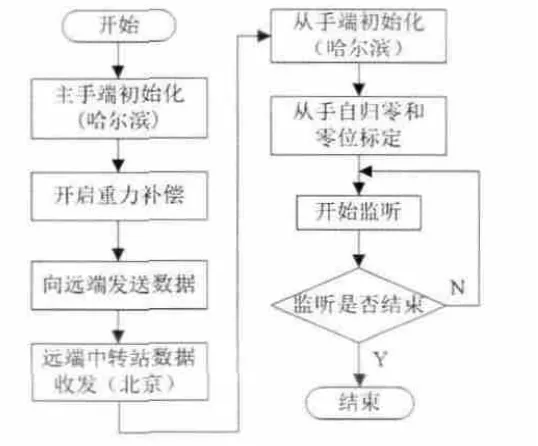
圖3 遙操作實驗流程圖
3.2 實驗結果及分析
為了掌握實驗時的網絡狀況,首先對哈爾濱與北京之間的網絡延時時間進行測試,所測的延時是主端遙操作主手到從端從手的數據傳輸延時。實驗在2013年6月20日上午8點到12點之間進行。根據所測得的網絡時延得到,時延均值758.32 ms,方差為260.15 ms,這表明延時值還是比較大的,并且波動大。實驗中主端的操作場景,見圖4。
圖4 主端的操作場景
圖5(a)、圖5(b)和圖5(c)分別顯示的是主手和從手前三個關節的電機角度跟蹤情況。這里的主手和從手前三個關節均指的是并聯部分,且主手和從手的并聯部分是同構的。從圖中可看出,從手的電機能夠在較小的延時時間之后很好地跟蹤主手電機。當主手運動較快時,時延相對較大。在主手的運動過程中,當速度發生劇烈變化時,在圖中表現為尖峰。此時,從手并沒有達到相應的尖峰便開始下降,即從手沒有到達主手相應的局部最大位置,這表明從手的位置精度有所下降。當主手處在穩定狀態下時,從手位置相對主手位置的偏差較小。
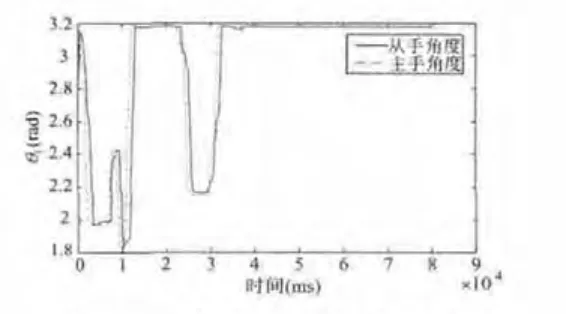
圖5 (a)1號關節角度跟蹤曲線
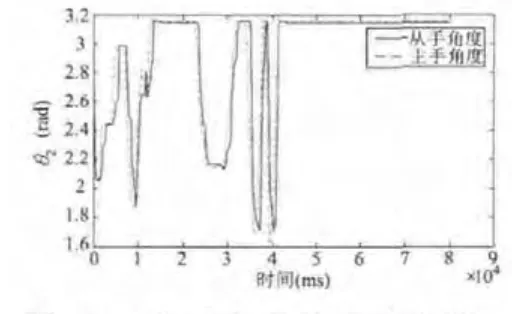
圖5 (b)2號關節角度跟蹤曲線
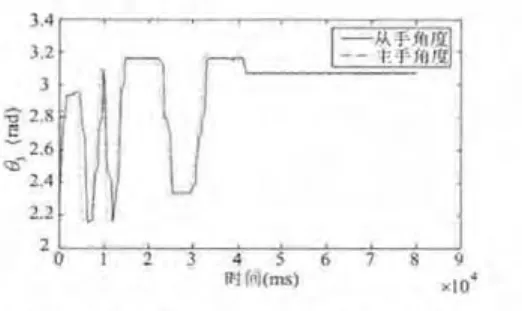
圖5(c)3號關節角度跟蹤曲線
通過本實驗說明,本文的遙操作主手系統是穩定的,在時延均值758.32 ms,方差為260.15 ms的網絡環境下,當主手速度變化較大時,從手的運動精度有所下降,但整體來說,從手的運動能較好地跟隨主手的運動。同時,本實驗也驗證了機器人輔助遠程手術的可行性。
4 總結
綜合串聯和并聯機構的優點,本文設計的串并聯混合構型的遙操作主手,不僅操作靈活而且有足夠的剛度,工作空間有200 mm×200 mm×200 mm大小,具有7+1個自由度(1個夾持自由度),能實現位姿解耦,具有良好的操作性能。搭建了主手控制系統,能實現重力補償并具有3個自由度的力反饋。最后,基于Internet的遙操作實驗表明,從手能夠較好的跟隨主手的運動,驗證了遙操作主手系統的穩定性以及機器人輔助遠程手術的可行性。
[1]杜志江,孫立寧,富歷新.外科手術機器人技術發展現狀及關鍵技術分析[J]. 哈爾濱工業大學學報,2003,35(7):773-777.
[2]RussellH T,Dan S. Medical Robotics in Computer-Integrated Surgery[C].IEEE Transactions on Robotics and Automation,2003(19):765-781.
[3]Marescaux J,Leroy J,Gagner M,et al.Transatlantic robot-assisted telesurgery[J].Nature,2001,413(6854):379-380.
[4]Francois Conti,Oussama Khatib.A New Actuation Approach for Haptic Interface Design[J].The International Journal of Robotics Research,2009(28):834-848.
[5]Christopher R,Wagner Nicholas Stylopoulos Robert D.Howe.The Role of Force Feedback in Surgery:Analysis of Blunt Dissection[C].10th Symposium on Haptic Interface for Virtual Environment and Teleoperator Systems,2002:118-125.
[6]Sheridan T B.Space teleoperation through time delay: review and prognosis[J].Robotics and Automation,IEEE Transactions on,1993,9(5):592-606.
[7]Steven Martin,Nick Hillier. Characterisation of the Novint Falcon Haptic Devicefor Application as a Robot Manipulator[C]. Australasian Conference on Robotics and Automation (ACRA), 2009.
[8]Mellor-Crummey J M,Scott M L.Algorithms for scalable synchronization on shared-memory multiprocessors[J].ACM Transactions on Computer Systems (TOCS),1991,9(1):21-65.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
西南軍醫(2014年5期)2014-04-25 07:42:48
中國中醫藥現代遠程教育(2014年13期)2014-03-01 04:26:36
