一種改進(jìn)的EKPF算法在固定單站無源定位中的應(yīng)用
2014-06-23 06:38:48申正義王晴晴王洪林
火控雷達(dá)技術(shù) 2014年1期
申正義 王晴晴 王洪林 郭 銳
(空軍預(yù)警學(xué)院 武漢 430019)
0 引言
有源雷達(dá)在現(xiàn)代戰(zhàn)爭中面臨著電子干擾、反輻射攻擊、低空超低空突防和隱身技術(shù)等一系列新的威脅。無源定位系統(tǒng)本身并不向外輻射電磁波,具有受環(huán)境影響小、隱蔽性強(qiáng)和作用距離遠(yuǎn)等優(yōu)點(diǎn)。僅利用單個(gè)固定觀測站接收目標(biāo)輻射源輻射的信號來估計(jì)目標(biāo)位置和運(yùn)動狀態(tài)的過程稱為固定單站無源定位與跟蹤。相對于多站系統(tǒng),固定單站無源定位系統(tǒng)只需一個(gè)無源信號接收站,且不需要數(shù)據(jù)通信傳輸,具有更強(qiáng)的隱蔽性,且設(shè)備簡單、系統(tǒng)相對獨(dú)立,作為目標(biāo)探測發(fā)展的重要方向和對有源雷達(dá)系統(tǒng)的完善和補(bǔ)充,將在現(xiàn)代電子戰(zhàn)中發(fā)揮越來越重要的作用[1-3]。
利用角度、相位差變化率、頻率和多普勒頻率變化率信息實(shí)現(xiàn)固定單站無源定位,是一種快速高精度的定位方法。但參數(shù)測量都帶有誤差,為實(shí)現(xiàn)快速高精度的固定單站無源定位,除了要有高精度的參數(shù)測量技術(shù)外,還需要研究高性能的跟蹤濾波算法,以便最大限度地利用觀測量提供的目標(biāo)運(yùn)動信息,同時(shí)也可減輕對參數(shù)測量技術(shù)的壓力。固定單站無源定位目標(biāo)跟蹤是典型的非線性濾波過程,經(jīng)典的濾波算法是擴(kuò)展卡爾曼濾波(Extended Kalman Filter,EKF),但EKF算法存在線性化誤差大,嚴(yán)重依賴于初始狀態(tài)的選擇,協(xié)方差矩陣易出現(xiàn)病態(tài)等問題。特別是當(dāng)系統(tǒng)非線性較強(qiáng)時(shí),這些問題會導(dǎo)致濾波定位結(jié)果不穩(wěn)定。
針對強(qiáng)非線性非高斯系統(tǒng),Gordon等人于1993年提出了粒子濾波(Particle Filter,PF)算法。標(biāo)準(zhǔn)PF算法選擇先驗(yàn)概率密度作為重要密度函數(shù),沒有充分考慮當(dāng)前時(shí)刻的觀測值,存在粒子退化現(xiàn)象[4]。為此,文獻(xiàn)[5]從改進(jìn)重要密度函數(shù)的選擇入手,提出了擴(kuò)展卡爾曼粒子濾波算法(Extended Kalman Particle Filter,EKPF)。針對實(shí)際系統(tǒng)往往是非高斯非線性的情況,但文獻(xiàn)[5]所描述的EKPF算法的本質(zhì)是在重要性采樣階段用EKF算法對每個(gè)粒子進(jìn)行更新,這無疑加大了算法的運(yùn)算量,使算法的實(shí)時(shí)性變差。為此本文提出一種改進(jìn)的EKPF算法,通過只對部分粒子進(jìn)行EKF采樣,在保證算法濾波性能基本不變的前提下有效降低了運(yùn)算量。
1 固定單站無源定位跟蹤原理
二維平面固定單站無源定位幾何關(guān)系如圖1所示,圖中直角坐標(biāo)系以陣元0中心為原點(diǎn),陣元0指向陣元1的方向?yàn)閄軸,T(x,y)為目標(biāo)輻射源,v為目標(biāo)輻射源速度矢量,vt為切向速度,vr為徑向速度,ε為目標(biāo)航向,r為目標(biāo)輻射源相對徑向距離,β為信號到達(dá)角,d為基線長度。

圖1 二維平面固定單站無源定位幾何關(guān)系圖
1.1 目標(biāo)跟蹤狀態(tài)方程
目標(biāo)輻射源最常見的運(yùn)動狀態(tài)為勻速直線運(yùn)動,給定其狀態(tài)向量為,其中x、y表示目標(biāo)位置,x·、y·表示目標(biāo)運(yùn)動速度。在二維平面直角坐標(biāo)系下,目標(biāo)跟蹤隨時(shí)間演化的狀態(tài)方程為:

式中,υk-1為狀態(tài)噪聲,包含了控制項(xiàng)的觀測誤差和系統(tǒng)模型誤差,Γ為干擾轉(zhuǎn)移矩陣,Φk,k-1為狀態(tài)轉(zhuǎn)移矩陣:

1.2 目標(biāo)跟蹤觀測方程
本文采用以角度、相位差變化率、多普勒頻率變化率為觀測量的固定單站無源定位方法[6]。根據(jù)目標(biāo)狀態(tài)向量與觀測量之間的關(guān)系,建立系統(tǒng)的觀測方程如下:

式中Z=(β,φ·,f·d)T為觀測量,nk為觀測噪聲,g(·)為狀態(tài)向量到觀測量的非線性變換函數(shù):

式(4)中,λ表示來波信號波長。
根據(jù)系統(tǒng)狀態(tài)方程和觀測方程,利用一定的濾波算法對目標(biāo)狀態(tài)進(jìn)行遞推估計(jì),就可實(shí)現(xiàn)固定單站對空中運(yùn)動目標(biāo)的無源定位與跟蹤。
2 改進(jìn)的EKPF算法描述
2.1 EKPF算法
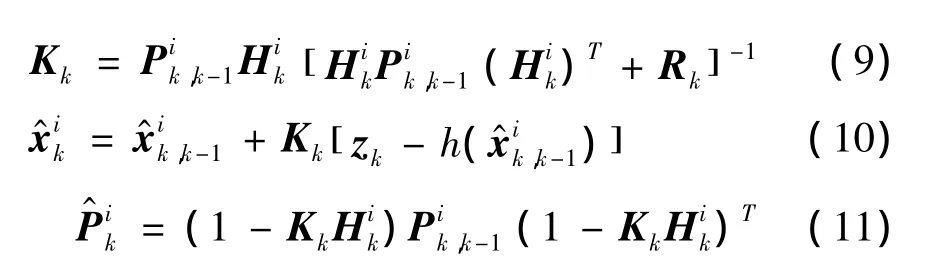
粒子濾波是一種基于蒙特卡羅思想的非線性、非高斯系統(tǒng)濾波方法,完全突破了卡爾曼濾波理論框架,它對系統(tǒng)的過程噪聲和觀測噪聲沒有任何限制。PF算法通過預(yù)測和更新來自于系統(tǒng)概率密度函數(shù)的采樣集,來近似非線性系統(tǒng)的貝葉斯估計(jì),從而獲得狀態(tài)變量的最小方差估計(jì)[7]。為了方便獲取系統(tǒng)樣本集,通常引入一個(gè)容易獲取樣本的重要密度函數(shù),標(biāo)準(zhǔn)PF算法選擇先驗(yàn)概率密度函數(shù)作為重要密度函數(shù),由于沒有考慮當(dāng)前的觀測值,重要性權(quán)值的方差會隨時(shí)間而隨機(jī)遞增,使得粒子的權(quán)重集中到少數(shù)粒子上,產(chǎn)生粒子退化問題[8]。減輕粒子退化的有效方法是選擇合適的重要密度函數(shù)。EKPF算法利用EKF算法對每個(gè)粒子進(jìn)行更新,將最后得到的近似后驗(yàn)密度作為重要密度函數(shù),引入了當(dāng)前時(shí)刻的最新觀測值,在一定程度上避免了粒子退化現(xiàn)象,提高了粒子濾波算法的估計(jì)精度[9]。
EKPF算法的具體運(yùn)算流程如下:
a.初始化粒子

b.用EKF更新粒子
c.重要性權(quán)值計(jì)算
按式(5)計(jì)算粒子的重要性權(quán)值,并進(jìn)行歸一化。

d.重采樣
e.狀態(tài)估計(jì)

2.2 改進(jìn)的EKPF算法
EKPF算法的本質(zhì)是在重要性采樣階段用EKF算法對每個(gè)粒子進(jìn)行更新,這無疑加大了算法的運(yùn)算量,使算法的實(shí)時(shí)性變差。為此,本文對EKPF算法作如下改進(jìn):
a.在EKPF算法第2步中,用EKF算法計(jì)算粒子集的均值和方差時(shí),只計(jì)算前N/4的粒子的均值和方差。
b.在EKPF算法第2步進(jìn)行重要性采樣時(shí),從重要密度函數(shù)中采樣產(chǎn)生前N/4的粒子,其余3N/4的粒子仍采用標(biāo)準(zhǔn)粒子算法的先驗(yàn)概率分布作為重要密度函數(shù)進(jìn)行采樣更新。
經(jīng)過這樣改進(jìn)的算法,既考慮了當(dāng)前時(shí)刻的觀測值、先驗(yàn)概率對后驗(yàn)概率分布的影響,又增加了粒子的多樣性,同時(shí)有效降低了計(jì)算量,提高了算法的實(shí)時(shí)性。
改進(jìn)的EKPF算法的運(yùn)算步驟如下:a.初始化粒子


c.重要性采樣
d.重要性權(quán)值計(jì)算
按式(5)計(jì)算粒子的重要性權(quán)值,并進(jìn)行歸一化。
e.重采樣
計(jì)算Neff,若Neff<Nth,則進(jìn)行重采樣,得到新的粒子集
f.狀態(tài)估計(jì)
按照式(6)求出狀態(tài)估計(jì)值。
3 改進(jìn)算法在該定位跟蹤中濾波性能仿真
3.1 仿真條件
假設(shè)在二維平面內(nèi),觀測站在坐標(biāo)原點(diǎn)處,初始位置為(90km,200km)的目標(biāo),按照V=-300m/s,50m/s的速度勻速運(yùn)動,輻射源信號載頻 fc=10GHz,兩陣元間距d=10m。觀測間隔1s,觀測時(shí)間150s。為比較各算法的濾波性能,采用式(18)定義的相對徑向距離誤差(RPE)來描述算法的濾波性能[10]。

本文在以下兩種假設(shè)下,分別進(jìn)行100次蒙特卡羅實(shí)驗(yàn),考察改進(jìn)的EKPF算法相對于傳統(tǒng)的EKF和EKPF算法的濾波性能。在EKPF及其改進(jìn)算法中,均取粒子數(shù) N=150,重采樣門限 Nth=50。
假設(shè)一:觀測量(β,˙φ,˙fd)的觀測誤差為(4,1,2),觀測誤差單位為(mrad,mrad/s,Hz/s),假設(shè)存在5%和20%的初始誤差;
假設(shè)二:初始值為測量值[10],觀測量(β,˙φ,˙fd)的觀測誤差為(2,0.4,1)和(5,0.8,2)。
3.2 仿真結(jié)果分析
經(jīng)Matlab軟件仿真,可以得到在假設(shè)一和假設(shè)二的條件下,100次蒙特卡羅實(shí)驗(yàn)中三種算法的收斂次數(shù)和單次濾波所需的時(shí)間如表1所示。
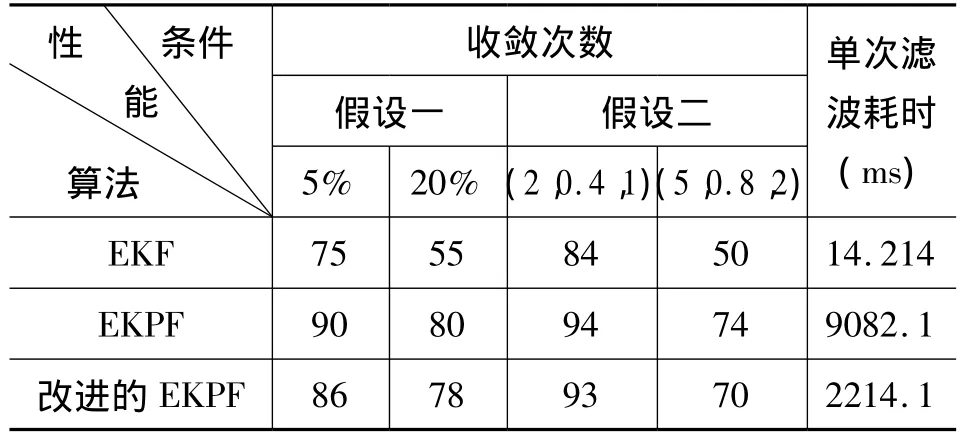
表1 100次實(shí)驗(yàn)中各算法收斂次數(shù)及濾波耗時(shí)對比
從表中可以看出,隨著初始誤差的增大,EKF算法的收斂次數(shù)明顯下降,而EKPF和改進(jìn)的EKPF算法的收斂次數(shù)下降不明顯。因此,改進(jìn)的EKPF算法與傳統(tǒng)的EKPF算法類似,都受初始誤差影響較小,相對于EKF算法穩(wěn)定性更好。在兩種觀測誤差條件下,兩種粒子濾波算法的收斂次數(shù)均大于EKF算法,說明粒子濾波算法在固定單站無源定位跟蹤系統(tǒng)中的性能優(yōu)于EKF算法。從單次濾波所需的時(shí)間來看,EKPF算法明顯高于EKF算法,實(shí)時(shí)性較差,改進(jìn)的EKPF算法相對于傳統(tǒng)的EKPF算法濾波耗時(shí)明顯下降。
為了提供三種算法更直觀的濾波性能比較,圖2和圖3分別給出了三種算法在假設(shè)一和假設(shè)二條件下RPE的統(tǒng)計(jì)平均曲線。
通過對EKPF算法的理論分析和仿真實(shí)驗(yàn)可知,EKPF算法的運(yùn)算量遠(yuǎn)大于EKF算法,這是因?yàn)镋KPF算法需對每個(gè)粒子進(jìn)行EKF濾波預(yù)測,其運(yùn)算量約為EKF算法的N倍再加上濾波結(jié)果輸出所需的運(yùn)算量。而改進(jìn)的EKPF算法只有N/4的粒子進(jìn)行了EKF采樣更新,既增加了粒子的多樣性,使粒子集更能體現(xiàn)概率密度函數(shù)的真實(shí)分布,又有效降低了算法的運(yùn)算量。仿真結(jié)果也表明,改進(jìn)的EKPF算法在保證傳統(tǒng)的EKPF算法濾波性能基本不變的前提下,有效降低了的運(yùn)算量,提高了算法的實(shí)時(shí)性。
需要注意的是,從仿真結(jié)果看,相對于EKPF算法,改進(jìn)的EKPF算法盡管運(yùn)算量大幅下降,但其濾波耗時(shí)仍較高,這是由于計(jì)算機(jī)模擬仿真時(shí)N個(gè)粒子的運(yùn)算是順序處理的。實(shí)際工程應(yīng)用中,在硬件上實(shí)現(xiàn)粒子濾波時(shí)N個(gè)粒子的運(yùn)算是并行處理的,且隨著高速計(jì)算機(jī)的出現(xiàn),運(yùn)算速度大幅提高,因此改進(jìn)的EKPF算法仍可滿足系統(tǒng)的實(shí)時(shí)性要求。
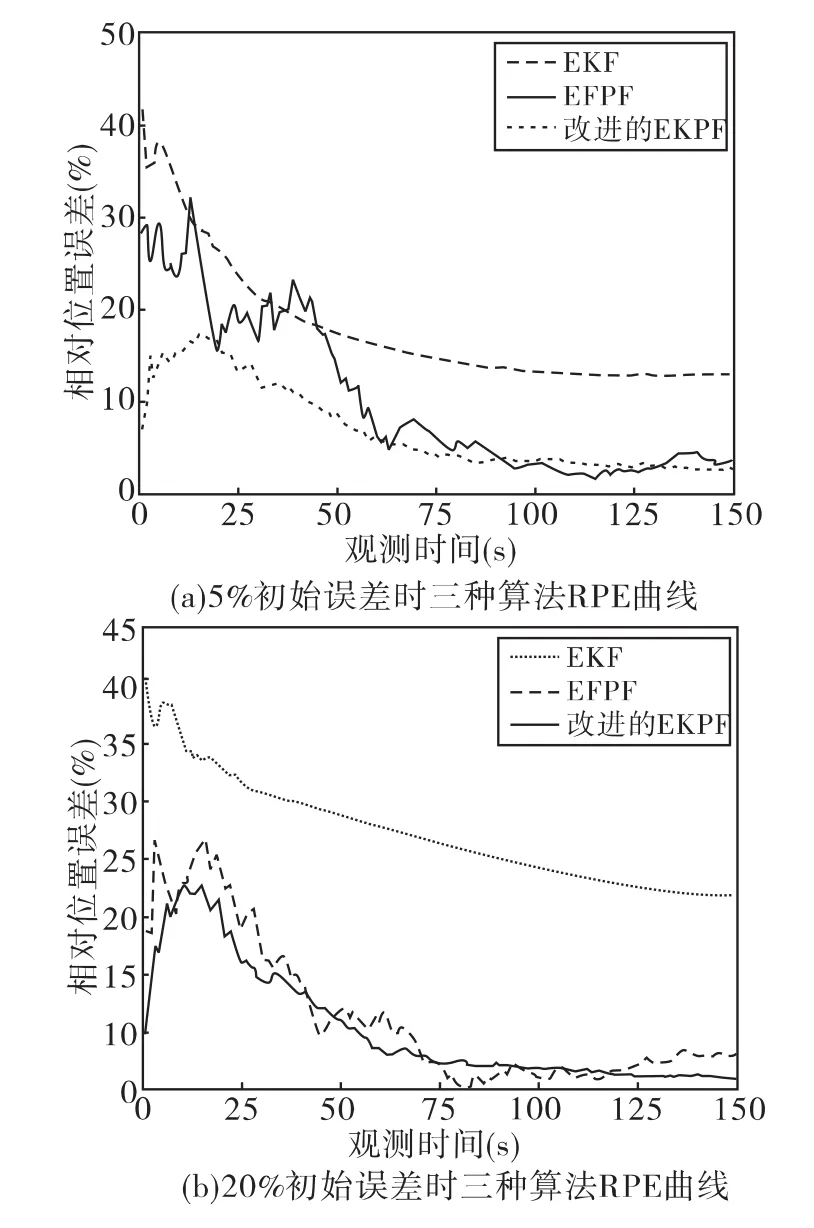
圖2 觀測誤差為(4,1,2)時(shí)三種算法性能比較

圖3 初始值為測量值時(shí)三種算法RPE曲線
4 結(jié)語
本文首先介紹了以角度、相位差變化率、多普勒頻率變化率為觀測量的定位與跟蹤的基本原理,然后針對在固定單站無源定位目標(biāo)跟蹤中EKPF算法運(yùn)算量大、實(shí)時(shí)性差的問題,對其進(jìn)行了改進(jìn),提出了改進(jìn)的EKPF算法。改進(jìn)的EKPF算法只對N/4的粒子進(jìn)行EKF采樣,其余3N/4的粒子仍采用先驗(yàn)概率分布進(jìn)行重要性采樣,這樣既降低了算法的運(yùn)算量,又增加了粒子的多樣性,使粒子集更能體現(xiàn)概率密度函數(shù)的真實(shí)分布。理論分析和仿真結(jié)果表明,改進(jìn)的EKPF算法相對于傳統(tǒng)的EKPF算法,在保證濾波性能基本不變的前提下,有效降低了算法的運(yùn)算量,具有較好的應(yīng)用價(jià)值。
[1] 何明浩.雷達(dá)對抗信息處理[M].北京:清華大學(xué)出版社,2010.
[2] 熊群力,陳潤生,楊小牛,等.綜合電子戰(zhàn)(第二版)[M].北京:國防工業(yè)出版社,2008.
[3]榮思遠(yuǎn),穆榮軍,崔乃剛.EKF容錯濾波方法在磁測自主導(dǎo)航中的應(yīng)用研究[J].電子學(xué)報(bào),2006,34(3):2268-2271.
[4] 朱志宇.粒子濾波算法及其應(yīng)用[M].北京:科學(xué)出版社,2010.
[5]Freitas J.F.G.,Niranjan M.,Gee A.H.Sequential Monte Carlo Methods to Train Neural Network Models[J].NeuralComputation,2000.12(4):995-993.
[6]萬方,丁建江,郁春來.利用空頻域信息的固定單站無源探測定位方法[J].探測與控制學(xué)報(bào),2010,32(3):91-95.
[7]張建安,趙修斌,李思佳.一種用于目標(biāo)跟蹤的改進(jìn)粒子濾波算法[J].計(jì)算機(jī)工程,2012,38(05):176-178.
[8]胡士強(qiáng),敬忠良.粒子濾波原理及其應(yīng)用[M].北京:科學(xué)出版社,2010.
[9]高靜.一種改進(jìn)的粒子濾波算法研究及應(yīng)用[D].延吉:延邊大學(xué),2010.
[10]郁春來.利用空頻域信息的單站被動目標(biāo)定位與跟蹤關(guān)鍵技術(shù)研究[D].長沙:國防科學(xué)技術(shù)大學(xué),2008.