提高系統穩定性的可控串聯補償控制策略
2014-06-23 07:46:22羅遠翔楊仁剛蔡國偉劉鋮
哈爾濱工程大學學報 2014年4期
羅遠翔,楊仁剛,蔡國偉,劉鋮
(1.中國農業大學信息與電氣工程學院,北京100083;2.東北電力大學電氣工程學院,吉林 吉林132012)
在輸電線路上加入串聯電容器,能減小線路感抗及兩端電勢間的相角差,從而提高系統的穩定性和傳輸能力[1-2]。另外還可以抑制系統的低頻振蕩和次同步諧振,對系統潮流進行調整等[3-5]。可控串聯補償(thyristor controlled series capacitor,TCSC)裝置克服了固定串聯補償存在的不足,尤其是固定串聯補償可能引發的次同步諧振問題。其通過改變晶閘管的觸發角可以連續、快速、大范圍地調節線路阻抗,以達到提高系統輸送能力,控制潮流和改善系統穩定性。目前已有許多有關TCSC對系統穩定性的影響及控制策略方面的研究。文獻[6]以輸出反饋控制方法研究了TCSC的控制規律,采用特征值分析和時域仿真方法分析了所提控制策略在提高電力系統穩定性中的作用;文獻[7]以暫態能量函數對時間的導數最小為目標來制定TCSC的控制策略,該策略需要全局所有發電機的信息;文獻[8]用勢能邊界法推導出TCSC的穩定控制策略;文獻[9]提出了一種魯棒控制方法,采用區域間搖擺功角及其變化率的單調增益函數來提高TCSC對穩定性的影響。本文分析了串聯補償裝置對系統穩定性的影響,以網絡暫態能量為依據所得的控制策略僅需要很少的就地測量量就可以有效地改善系統的暫態穩定性,抑制系統的振蕩,并在仿真計算中與文獻[8]的方法進行了比較,結果表明本文所提控制策略的有效性。
1 網絡暫態能量函數
網絡暫態能量函數[10]是在結構保持模型的基礎上推導得出的,具體表達式如下:
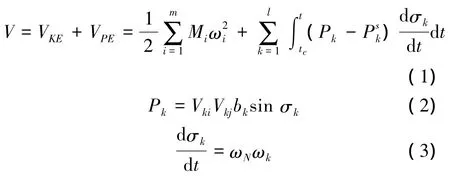
式中:V為系統總能量,VKE為系統總動能,VPE為系統總勢能,Mi為第i臺發電機的轉動慣量,ωN為系統參考機的額定轉速,ωi為第i臺發電機的角速度,ωk為第k條支路兩端角速度差,tc為故障切除時間,Pk為第k條支路有功功率,Pks為第k條支路故障后平衡狀態下的有功功率,σk為第k條支路兩端相角差,Vki、Vkj為第k條支路兩端電壓值。則第k條支路的暫態勢能表示為

系統的總能量由勢能和動能2部分組成。動能存在于發電機中,勢能分布于網絡中,暫態勢能在網絡中的某一局部(割集)的過分集中將導致系統失去穩定。故障后系統若要仍然維持穩定運行,那么發電機的轉速在故障清除后的某一時刻必須為零,即系統動能和勢能時刻進行等量交換。TCSC可以改變網絡參數進而改變網絡中的暫態能量的分布。
2 TCSC的控制策略
2.1 單機無窮大系統
圖1所示單機無窮大系統,發電機采用經典二階模型,忽略系統阻尼,負荷采用恒功率模型。線路上裝設可控串聯補償裝置,TCSC結構如圖2所示。圖3為支路2-3兩端相角差和角速度差的關系曲線,a點和o點分別為無補償時系統的穩定和不穩定平衡點,曲線cdoc為無補償時系統的穩定邊界。
當故障清除后,若系統的運行軌跡處于穩定邊界內,系統將能夠維持穩定運行,相反在沒有其他控制作用下系統將失去穩定。若故障后網絡結構不變,a點和o'點為補償后系統的穩定和不穩定運行點。可見,加補償后可以擴大系統的穩定運行的區域,提高系統的暫態穩定性。
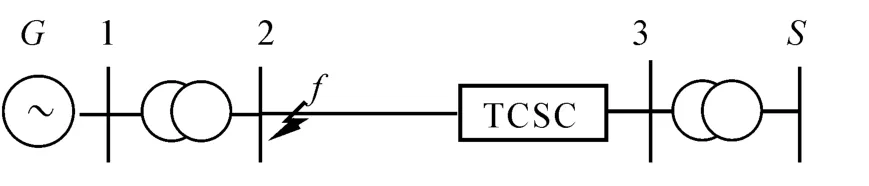
圖1 單機無窮大系統Fig.1 A single machine infinite bus system
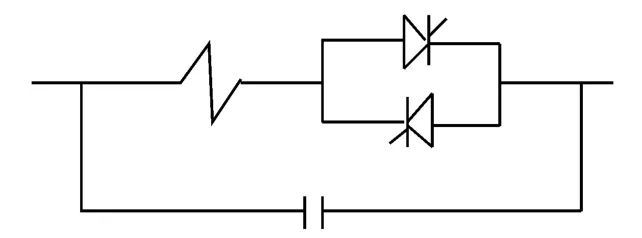
圖2 TCSC模型Fig.2 TCSC module
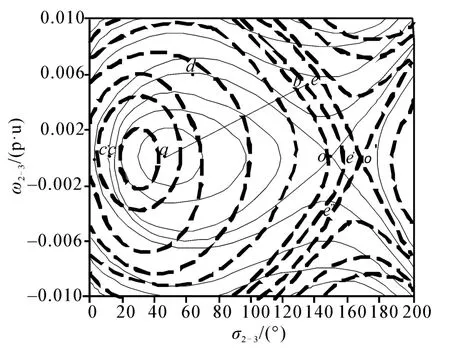
圖3 支路2-3兩端相角差與角速度差曲線Fig.3 Curves of ω-σ with branch 2-3
假設在某一時刻f點上發生三相故障,系統運行到b點故障切除。b點不位于無補償時系統穩定邊界內,系統將要失去穩定。但b點仍然處于有補償時系統的穩定邊界內,則此時TCSC投入。補償后系統運行曲線的斜率增加,即發電機獲得更大的反向加速度,使其轉速更快減小為零。由圖4可見,在發電機轉速達到零時,系統動能為零,勢能最大,即支路兩端相角差達到最大值,此時支路2-3的暫態勢能的大小為有補償時支路上的功率在區間[σ(2-3)c,σ(2-3)max]內的積分,其值為面積 A1+A2。若此時TCSC閉鎖,有功功率的變化軌跡為圖4中的實線,在σ(2-3)減小的過程中,則割集的暫態勢能變為圖4中的面積A2,其值明顯減小,因此有效地抑制了節點2-3間的暫態勢能的變化,緩解了其遭受到暫態勢能的沖擊程度,有利于系統暫態穩定性的改善。
由圖3亦可見,在系統運行到支路兩端相角差最大(o點)時,TCSC閉鎖,系統將沿著曲線oc運行。若此時TCSC不閉鎖,系統將沿著虛線bo運行,使得系統遠離穩定運行點。在系統運行到c點,即支路兩端相角差達到最小值時TCSC投入。此時支路2-3暫態勢能的大小由圖4中的面積(A3+A4)減小為面積A3,進一步抑制了支路上暫態勢能的變化。若支路兩端相角差最小值小于零,則此時TCSC不投入,當支路兩端角度回擺到零度時TCSC再投入。
若系統運行到圖3中的e點時故障清除,此時如果在支路兩端相角差最大即e'點閉鎖TCSC,系統將會失去穩定,因e'點在無補償時系統的穩定邊界外,則此時TCSC不閉鎖,當系統運行到e″點即圖4中的σ(2-3)h點時TCSC閉鎖,雖然系統仍然處在穩定邊界外,但當系統運行到相角差最小值即c″點時投入TCSC系統很快將運行到穩定域內。
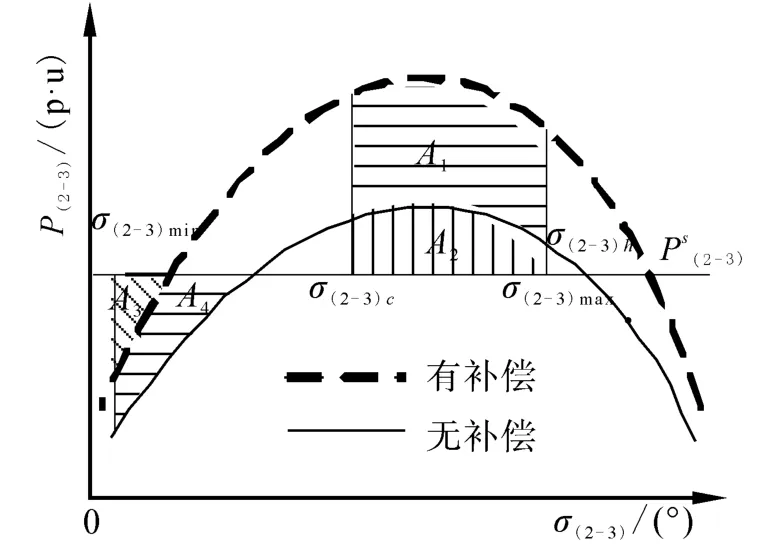
圖4 支路2-3功率與相角差的變化曲線Fig.4 Curves of P-σ with branch 2-3
由此對于經典模型下的單機無窮大系統,故障后TCSC的穩定控制策略如下:
1)清除時,TCSC投入;
2)若 σh≥σk≥0,則 ωk>0,TCSC 強補;ωk≤0,TCSC閉鎖;
3)若 σk>σh或 σk<0,TCSC 閉鎖。
在此過程只考慮了TCSC的2種極端狀態,即可以提高系統暫態穩定性和抑制系統后續振蕩。
2.2 多機系統
上述的單機無窮大系統中的控制策略同樣可以應用于多機系統。多機系統失穩時通常在臨界割集處將系統分解為2部分,因此在臨界割集的支路中安裝TCSC能有效地提高系統的暫態穩定性,并且只需用其所在支路的信息就可以實現控制。
3 仿真與分析
3.1 單機系統
為驗證本文控制策略的效果,進行了仿真分析,并與文獻[8]的方法進行了比較。單機無窮大系統如圖1所示,0 s時在f點發生三相短路故障。無補償時系統的臨界切除時間為0.59 s,圖5為故障切除時間為0.62 s時的發電機的功角曲線和整個系統的暫態能量分布圖。
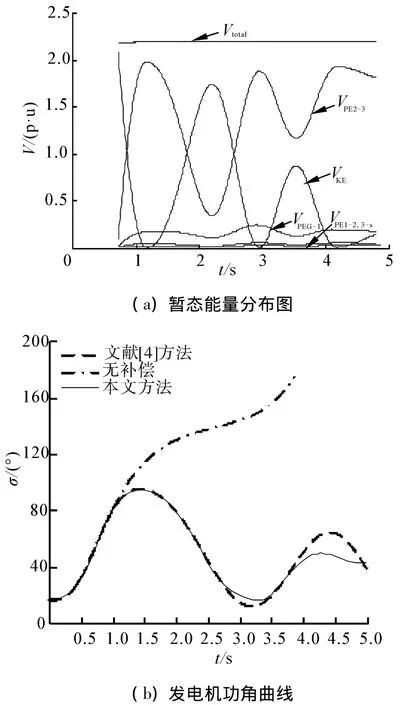
圖5 故障切除時間為0.62 s的仿真結果Fig.5 Simulink result of clearing the fault at 0.62 s
無補償時系統將失去穩定,本文方法使得臨界割集上支路的暫態勢能衰減的更快即系統振蕩的衰減速度明顯加快,臨界切除時間延長至0.66 s。并且由圖5(a)可見,系統的總能量仍然是守恒的,但是能量的分布卻發生了變化,隨著控制策略的實施,暫態勢能更加均勻的分布于各支路中,動能逐漸的減少,使得系統的穩定性得到了有效地提高。
3.2 多機系統
多機系統以NEW ENGLAND 10機39節點系統為例,如圖6所示,系統模型及參數見文獻[10]。發電機采用經典模型,忽略線路電阻,負荷采用恒功率模型。假設0 s在節點3發生三相短路故障,故障使得9#同步機相對于系統其他機組失去穩定,臨界割集為支路{8-9,2-1},如圖6所示。在支路5-8,8-9,2-1和9-39裝設 TCSC,補償度為所在支路的50%,每個TCSC都由上述控制策略進行相應的控制。圖7(a)為無補償和在支路2-1上裝設補償,0.34 s切除故障時9#同步發電機的功角曲線,圖7(b)為此時支路的勢能曲線。
由圖7可見,本文提出的控制方法可以有效抑制系統振蕩,提高系統穩定性。表1為不同支路安裝TCSC時對系統穩定性的影響。
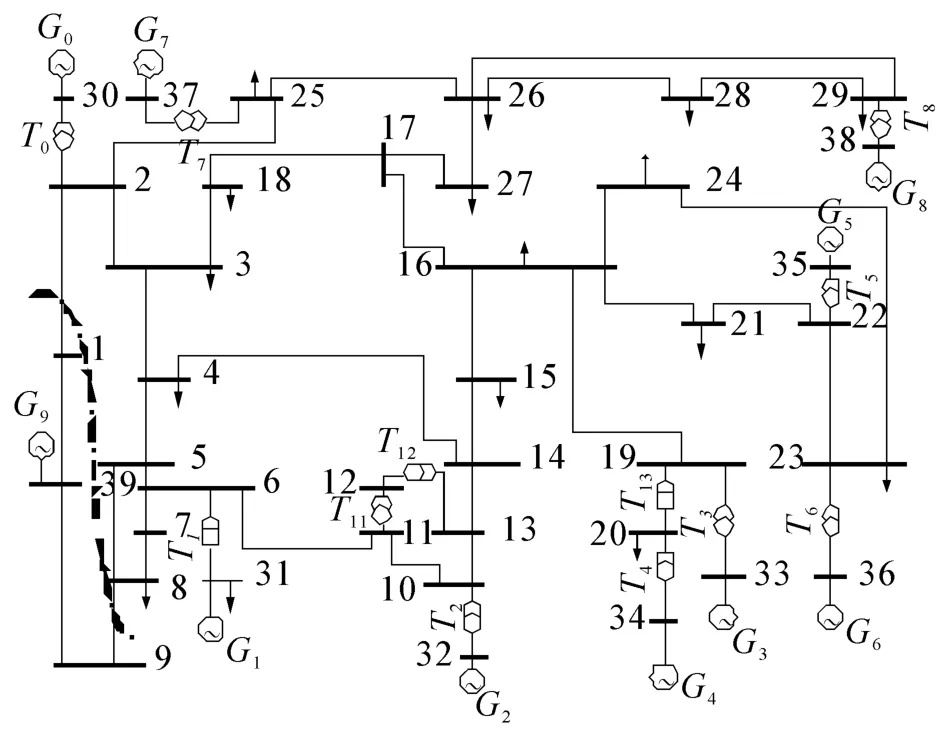
圖6 New England 10機系統示意圖Fig.6 The sketch of New England 10-machine power system
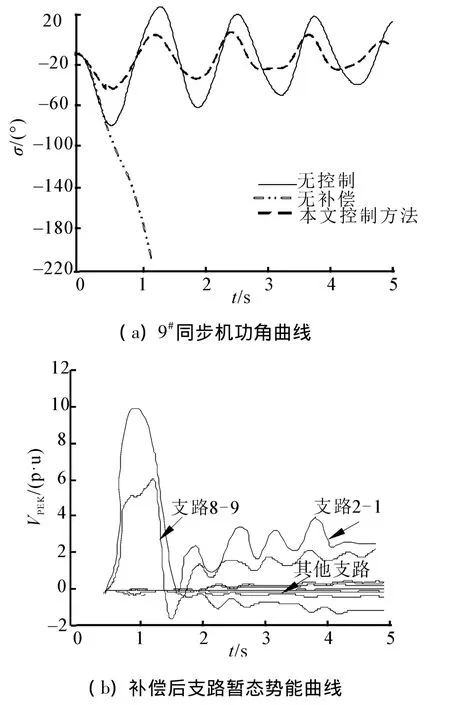
圖7 10機系統仿真結果Fig.7 Simulink result of 10-machine system
由表可知,在支路2-1上裝設TCSC時,故障臨界切除時間可延長至0.51 s,支路2-1對系統穩定性起著很重要的作用。在支路5-8上裝設TCSC時,對系統穩定性沒有太大影響,在割集支路2-1,8-9裝設補償時,臨界切除時間為0.62 s,4條支路都裝設TCSC時系統故障臨界切除時間為0.71 s。因此,在割集支路上進行補償起著關鍵性的作用。
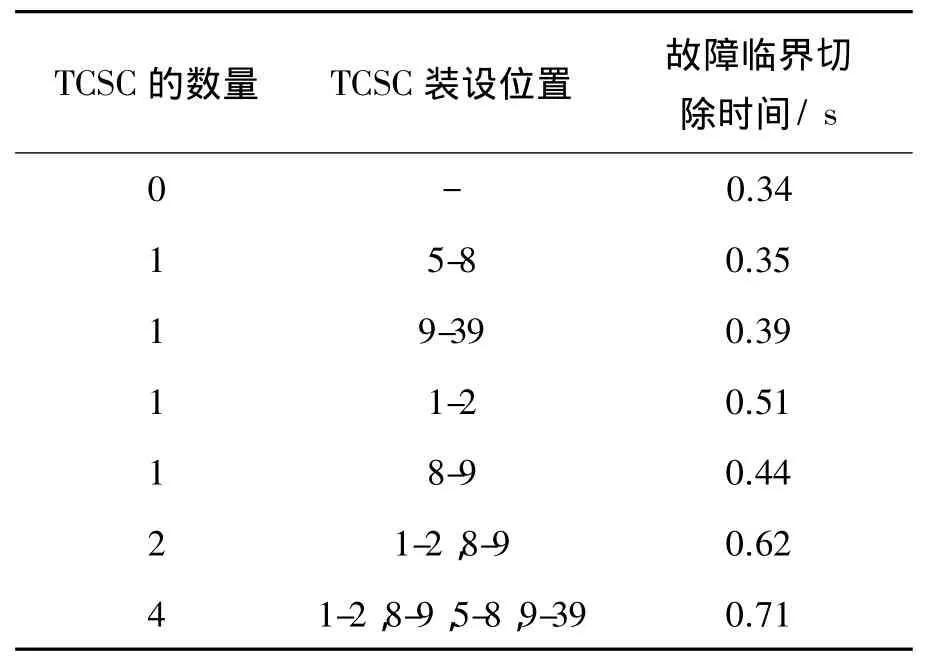
表1 TCSC對系統暫態穩定性的影響Table 1 Effect of TCSC on transient stability
4 控制策略的實現
上述控制策略由支路兩端相角差及角速度差決定,隨故障的類型、運行條件等而變化,因此必須實時測量,才能得到最佳的控制時機。本文采用適應性濾波的時間序列自回歸(AR)模型預測算法對其進行預測。
4.1 預測方法
對于時間序列 x1,x2,x3,… xt,…其 n 階自回歸模型為

該式表示t時刻預測值可用t時刻前n個觀測值xt-1,xt-2,…,xt-n來預估,φ1,φ2,…,φn為模型參數,et表示模型誤差。適應性濾波可以應用于式(5)所示的自回歸模型上,系數 φ1,φ2,…,φn可以通過非線性最小二乘法加上適應性濾波來求得。實際上這種方法就是從φi一組初始值開始,逐次迭代,不斷調整,以實現自回歸系統的最優化。
模型中的φi在迭代的過程中并不是固定不變的,而是每迭代一次,都要發生變化,逐次逼近最佳估計值。完整的適應性AR濾波模型表達式:

適應性濾波預測方法具有簡單易行、自適應性、約束條件少、使用數據點少等優點。
4.2 預測結果
從發出控制命令到完成操作,有一段延時時間Δt,為了保證在優選控制時機到來前預測到它,則控制指令需要提前 Δt時間發出。本文中取 Δt為0.20 s。圖8給出圖所示的10機系統中支路2-1兩端相角差以及角速度差的實際值與預測值的曲線。由圖8可見,應用本文所提的預測方法可以較準確地預測出支路兩端相角差及角速度差,因此用此方法預測的時間對TCSC進行控制,對系統穩定性不會造成太大的影響。
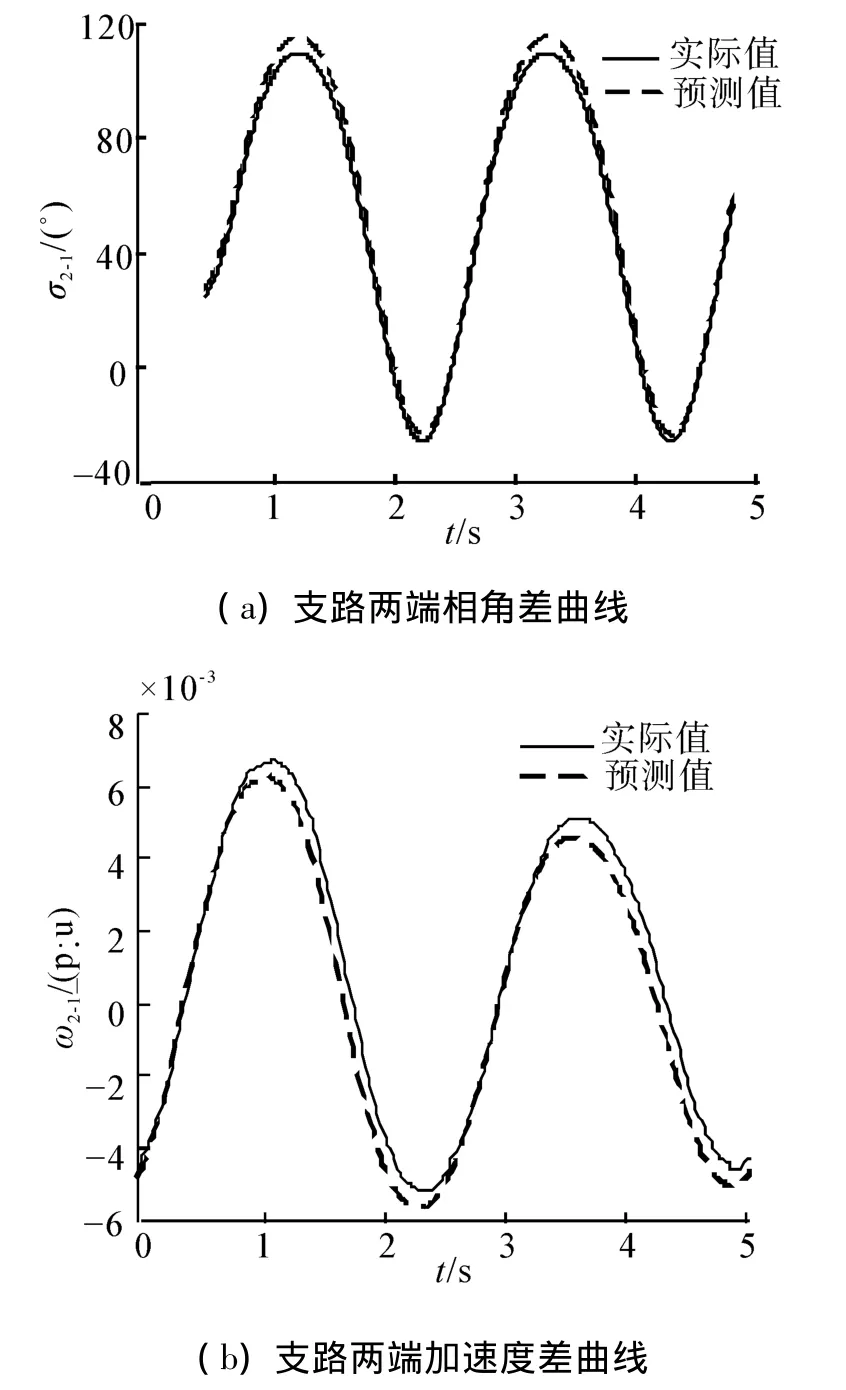
圖8 10機系統支路2-1曲線比較Fig.8 The curves of branch 2-1 of 10-machine system
5 結束語
通過對可控串聯補償控制策略的研究表明,以補償裝置所裝設支路的暫態勢能為依據所得的控制策略用很少的測量量就可以有效提高系統的暫態穩定性,并且該控制策略僅需所裝設支路的就地信號不需要任何其他遙測信息量。仿真結果表明,按本文提出的控制策略,能有效地阻尼系統的搖擺。加入預測作用后能考慮控制時間的延遲,保證在各種運行條件和故障條件下控制策略的實現。
[1]MEIKANDASIVAM S,NEMA R K,JSIN S K.Performance of installed TCSC projects[C]//2010 India Inernational Conference on Power Electronics(IICPE).New Delhi,India.2011:1-8.
[2]張健,冀瑞芳,李國慶.TCSC優化配置提高可用輸電能力的研究[J].電力系統保護與控制,2012,40(1):23-28.ZHANG Jian,JI Ruifang,LI Guoqing.Study of enhancement of available transfer capability using TCSC optimal allocation[J].Power System Protection and Control,2012,40(1):23-28.
[3]李可軍,趙建國,高洪霞.可控串聯補償阻抗控制策略研究[J].電力自動化設備,2009,29(5):52-56.LI Kejun,ZHAO Jianguo,GAO Hongxia.Impedance control strategy of thyristor controlled series capacitor[J].Electric Power Automation Equipment,2009,29(5):52-56.
[4]CHITTORA P,KUMAR N.A comparative study of damping subsynchronous resonance using TCSC and IMDU[C]//2012 IEEE Fifth Power India Conference.Murthal,India,2012:1-6.
[5]朱旭凱,周孝信,田方,等.基于本地測量信號的TCSC抑制次同步振蕩附加控制[J].電力系統自動化,2011,35(23):22-25.ZHU Xukai,ZHU Xiaoxin,TIAN Fang,et al.Supplementary damping control of TCSC for subsynchronous oscillation based on local measured signal[J].Automation of Electric Power Systems,2011,35(23):22-25.
[6]陳淮金可控串聯補償在提高電力系統穩定性中的作用研究[J].電力系統自動化,1996,20(10):14-17.CHEN Huaijin Enhancement of power system stability by controllable series compensation[J].Automation of Electric Power Systems,1996,20(10):14-17.
[7]汪冰,劉笙,陳陳.基于能量函數的可控串聯補償穩定控制策略[J].電網技術,2002,26(2):19-23.WANG Bing,LIU Sheng,CHEN Chen.An energy function method based stability control strategy for thyristor controlled compensation[J].Power System Technology,2002,26(2):19-23.
[8]PADIYAR K R,RAO K U.Discrete control of series compensation for stability improvement in power systems[J].E-lectrical Power and Energy Systems,1997,19(5):311-319.
[9]KOSTEREV D N,KOLODZIEJ W J,MOHLER R R,et al.Robust transient stability control using thyristor-controlled series compensation[C]//Proceedings of the 1995 IEEE Conference on Control Applications.Albany,USA,1995:215-220.
[10]蔡國偉.電力系統暫態穩定性的支路暫態勢能分析方法[D].哈爾濱:哈爾濱工業大學,1999.CAI Guowei.Branch transient potential energy analysis method for power system transient stability[D].Harbin:Harbin Institute of Technology,1999.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
通信電源技術(2016年1期)2016-04-16 04:57:26