一種船用碟式斯特林太陽能熱發電裝置的設計與實現
2014-06-27 02:17:40,,
船海工程 2014年2期
,,
(武漢理工大學 能源與動力工程學院,武漢 430063)
太陽能作為一種清潔可持續使用能源,與常規能源相比較,它可以無限使用,不會枯竭,而且安全無害,只要加以收集、轉換即可直接使用,因而在開發利用過程中具有顯著的優勢。在分析了當前船用太陽能發電現狀的基礎上,以碟式斯特林太陽能熱發電技術和雙軸混合控制太陽能跟蹤技術為核心,研究并設計了一種船用碟式斯特林太陽能熱發電裝置。該裝置可實現在船舶這一特殊的運動載體和水中航行這一特定環境下,通過自動跟蹤太陽的碟式聚光鏡將太陽光聚焦于斯特林發動機頭部,加熱高壓氫氣膨脹推動活塞做功,通過曲柄連桿機構帶動發電機轉化成電能輸出,作為輔助能源應用在船舶的照明系統、駕駛系統、空調系統、輔助機械等方面,從而實現節能減排、保護環境的良好效果[1]。
1 碟式太陽能熱發電技術
近年來,太陽能光伏發電系統已經獲得了大量的研究且在陸上得到了廣泛應用,但在船舶上的應用目前主要集中于小型船舶上,在全動力船舶和大型遠洋船舶上推廣不多。其主要原因就是光伏發電因受材料的限制,發電量不高,效率低,其發電成本相對較高,系統成本回收期較長,在船舶領域的發展受到了很大程度的限制。太陽能熱發電較光伏發電更能適應大規模的工業化應用。目前,太陽能熱力發電單機容量已發展到兆瓦級,全球已有數十座兆瓦級太陽能熱電站投入試驗運行[2]。按集熱器類型的不同太陽能熱發電系統可分為槽式、塔式和碟式三種系統。碟式系統具有高效、模塊化和具備組成混合發電系統的能力等特點,既可以作分布式系統單獨供電,也可以并網發電。在所有太陽能發電技術中,碟式太陽能熱發電系統具有最高的光熱轉換效率(約85%)和光電轉換效率(約31%),因此有潛力成為最便宜的可再生能源之一。碟式斯特林太陽能熱發電裝置原理圖見圖1。
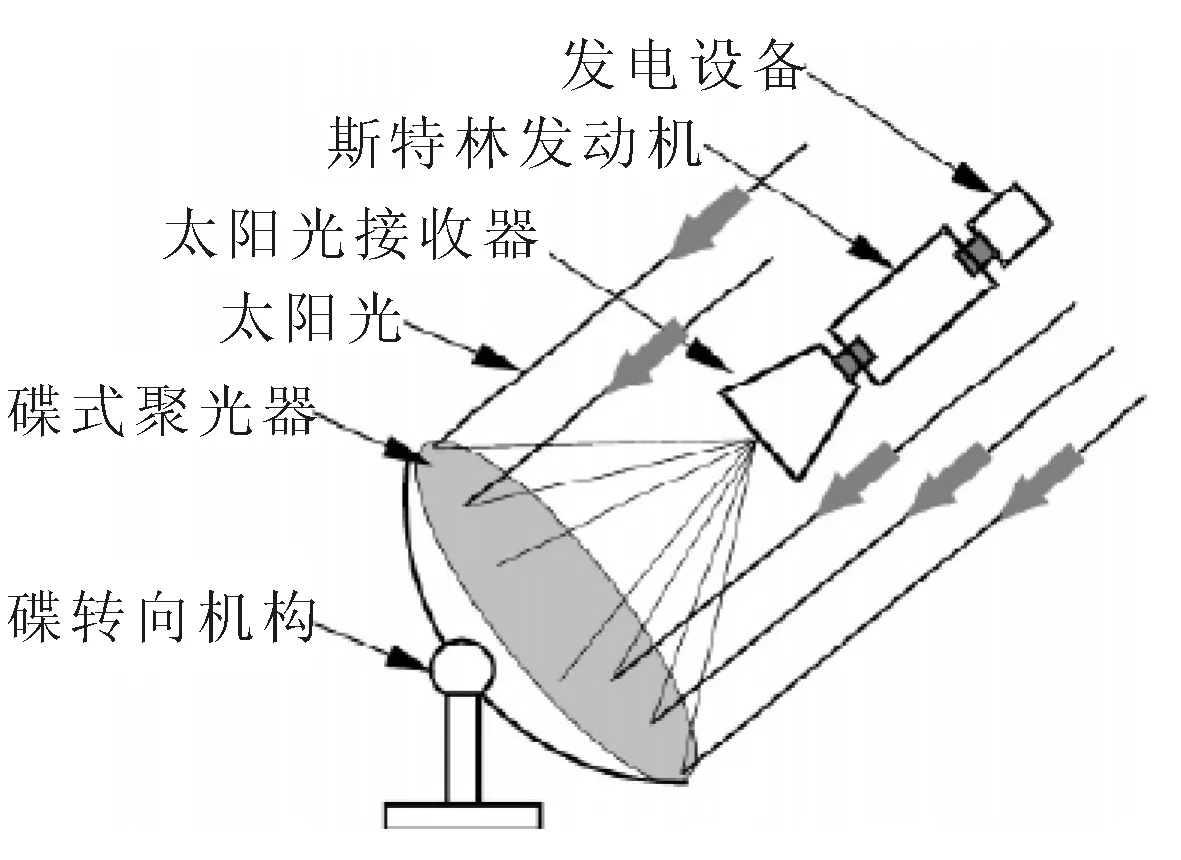
圖1 碟式斯特林太陽能熱發電裝置系統原理
表1是幾種太陽能發電形式的技術性能對比。從中可見,碟式太陽能熱發電具有光電轉換效率高、發電規模靈活、耗水量少等優點。又由于該系統對場地的平坦性要求低,因此應用范圍廣泛。以上的這些優點,為碟式斯特林太陽能熱發電技在船舶上的應用提供了可能。
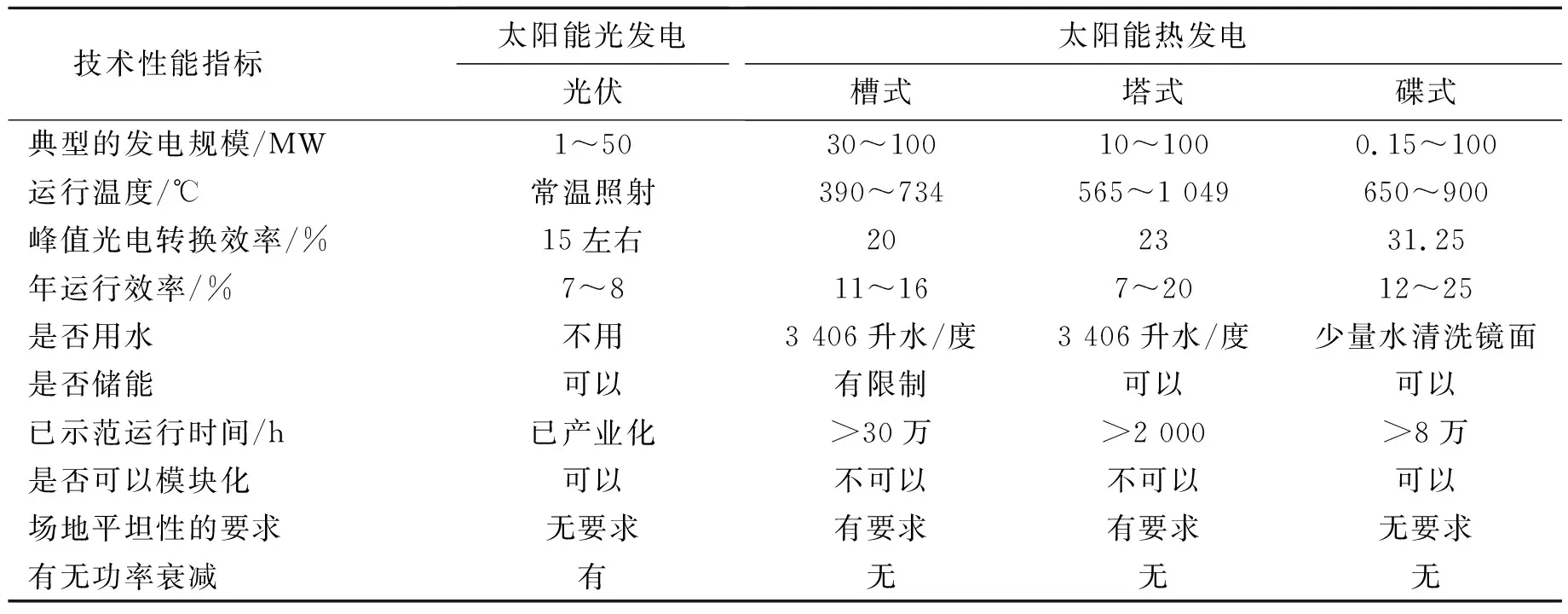
表1 太陽能發電形式的一些工程技術性能對比[3]
2 發電裝置系統硬件設計
本文研究并設計了一種船用碟式斯特林太陽能熱發電裝置,其硬件系統構成主要包括:碟式聚光器、聚光器支架、斯特林發動機支架、太陽能斯特林機、由斯特林機驅動的發電機、太陽雙軸跟蹤裝置、以及自動跟蹤控制系統,見圖2。

圖2 船用碟式斯特林太陽能熱發電裝置結構
其中,碟式聚光反射器呈扇形分割,由6個扇形聚光反射鏡片組拼接成一旋轉拋物面結構;反射鏡支架固定于船舶甲板上,用于支撐并安裝所述碟式聚光反射鏡;斯特林發動機支架一端固定連接所述碟式聚光反射鏡支架,另一端固定連接太陽能斯特林機上;太陽能斯特林機的接收器位于碟式聚光反射鏡的焦點處;發電機固定連接所述太陽能斯特林機上,構成斯特林發電機模塊;太陽雙軸跟蹤裝置安裝于所述反射鏡支架上,包括兩臺直流電機、兩臺減速器、一個絲杠螺母副和一個帶輪傳動機構;自動跟蹤控制系統通過信號線連接所述太陽雙軸跟蹤裝置,控制所述碟式聚光反射鏡的運行。整個裝置主要用螺栓連接,便于拆裝和運輸。裝置的轉動、定位和連接等機械結構都簡單可靠,跟蹤運動用單片機實現控制,這樣不僅加工容易且增加了系統的可靠性。
3 跟蹤控制系統設計
要將碟式斯特林太陽能熱發電技術應用在船舶上,首先需要解決的問題就是自動跟蹤太陽的碟式聚光器跟蹤控制系統的設計,由于“斯特林”熱機及其吸熱器等部分是不動的,把移動的太陽能穩定地匯集聚焦到置于移動船舶上的太陽接收器上,要有一套自動跟蹤裝置,這種跟蹤裝置應該是以太陽為目的物的主動尋找的雙通道閉環跟蹤裝置。基于此,本文提出了一種采用高度角-方位角雙軸混合跟蹤式(視日運動軌跡跟蹤和光電跟蹤相結合)船用碟式太陽跟蹤聚光器跟蹤控制系統,該碟式聚光器可實現在船舶航行過程中對太陽運行位置變化的準確預測,進而通過調節碟式聚光器的轉角提高該船用太陽能熱發電系統的綜合轉化效率。
3.1 跟蹤控制系統硬件
1)微控制器采用STM32 F3。STM32 F3微控制器整合了帶有DSP與FPU指令、工作頻率為72 MHz的32位ARM Cortex-M4內核和高級模擬外設,從而提高了靈活性。該控制器通過整合Cortex-M4內核、快速12位5 MSPS和精密16位sigma-delta ADC、可編程增益放大器(4檔增益、精確度為1%)、快速50 ns比較器和工作頻率為144 MHz的多功能時鐘控制單元實現了嵌入式DSC設計創新,從而實現了最佳控制效果。其優化的系統架構使其能有效控制并處理電路板內的混合信號,如三相電機控制、生物識別和工業傳感器輸出或音頻濾波器等。
2)GPS接收器。采用HOLUX(長天科技股份有限公司)生產的環天BU-353S4 SIRF 4芯片,支持NMEA0183通信協議支持NMEA0183通訊協議,內建超大電容, 可儲存快速取得的衛星訊號數據。接收器帶48個追蹤頻道,靈敏度為-163 dBm,定位精度為2.5 m,并支持WAAS(wide area augmentation System)。STM32 F3單片機解碼出船舶航行過程中的實時經緯度以及UTC(coordinated universal time)時間,根據相關天文公式計算出當前太陽高度角和方位角。
在時刻t,太陽的高度角h和方位角α分別為
h(t)= arc sin-1[sin(δt)sin(φt)+
cos(δt)cos(φt)cos(ωt)]
(1)


(2)
式中:φ——當前船舶所在的地理緯度;
δ——太陽赤緯角;
ω——太陽時角[4]。
其中赤緯角可由Cooper的近似計算公式求得
(3)
式中:n——1年中的第幾天。
一天當中隨時間變化引起的太陽位置的變化可由太陽時角ω表示,太陽在正午時太陽時角為0°,每小時變化15°,上午為正,下午為負。因此有
ω=(12-T)·15°
(4)
式中:T——船舶所在地時間。
3)機械控制機構。主要由水平方向調整電機、俯仰方向調整電機、絲杠螺母副、減速器、帶輪傳動機構組成。當STM32 F3單片機根據GPS接收模塊得到船舶當前所在位置的經緯度和UTC時間,根據公式(1)、(2)計算出當前的太陽高度角增量和方位角增量,輸出一定數量的PWM(pulse width modulation)信號,驅動電機在水平和俯仰兩個方向上進行調整,實現對太陽的初步跟蹤。
4)電子羅盤。采用美國KVH公司生產的C100電子(數字)羅盤,其具有體積小、價格低、性能穩定可靠等特點。它采用磁通門技術,航向精度可達到0.5°以內,分辨率為0.1°,通過其數字接口,可提供地球磁場X、Y軸的水平分量,其本身采用鋁殼封裝,工作溫度-40°~+65°,內置的自動校準軟件,可對磁場變化而引起的誤差進行修正[5]。
電子羅盤根據其原理識別出船舶航行方向與北方向的夾角并通過接口輸出角度值,當船舶航向改變時,由單片機STM32 F3采集電子羅盤輸出的角度值變化量,進行各種判斷、處理;同時單片機發出指令給方位角調整電機,驅動碟式太陽跟蹤聚光器回轉到船舶航向改變前的朝向。
5)反饋調整模塊。利用光電二極管的輸出,判斷碟式聚光器的軸線是否正對太陽,通過碟式聚光器軸線與理想位置的偏差調整驅動裝置的運動狀態。從而調整聚光器的位置,使聚光器主光軸指向太陽。如圖3所示,裝置采用4個光電二極管作為傳感器來檢測光強的變化,跟蹤太陽的位置,進行誤差校正。
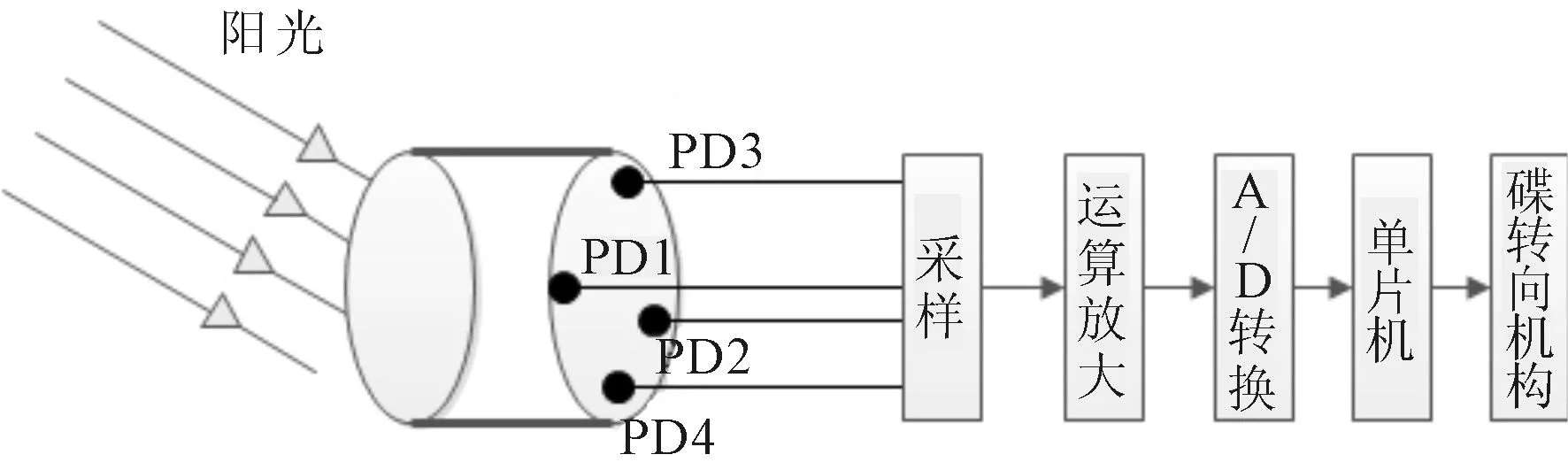
圖3 光電二極管跟蹤太陽原理
4個完全相同的光電二極管封裝于一個高壁圓筒傳感器盒內,均勻分布在東南西北4個方位處,并沿靠近筒壁布置,圓筒有一定高度遮擋斜射的太陽光。傳感器盒固定在聚光器邊緣面上,用來監測太陽光。其中PD1和PD2這2個光電二極管用于檢測東西方向光線變化,調整太陽碟式聚光器東西方向角,即方位角;PD3和PD4這2個光電二極管則用于調整太陽碟式聚光器南北方向角,即高度角。檢測電路見圖4 示。
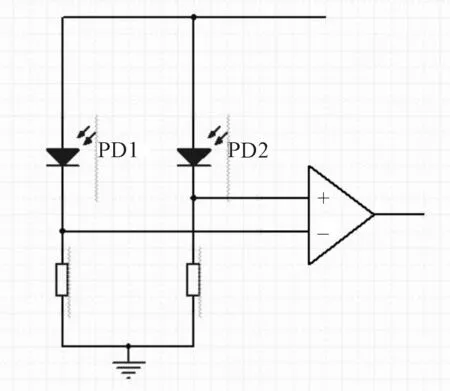
圖4 檢測電路
當太陽光垂直照射到聚光器表面時,PD1和PD2接受的太陽輻射強度相同,經比較器后輸出信號為零;當太陽光偏離聚光器主光軸時,PD1和PD2接受的太陽輻射強度不同,經比較器后輸出偏差信號,完成信號采樣過程。偏差信號通過運放及相應保護電路,經模數轉換成數字信號,根據偏差信號的正負和大小決定電機的轉向和轉動角度,直到小于精度允許范圍,電機停止動作。特別地,當東西方位或南北方位的兩個光電傳感器感受到的光強差值偏差數字信號絕對值小于某個設定閥值時,單片機不發出讓電機動作的信號;當光強差值偏差數字信號絕對值超過設定閥值時,單片機才發出信號控制電機轉動,這樣控制的目的是提高系統的經濟性。
6)天氣模塊。主要用于海面天氣狀態的檢測,如光強、風速和陰雨等。當海面風速達到或大于設定值時,STM32 F3單片機發出指令,通過接口電路驅動轉向機構轉向使碟式聚光器受風面積最小,從而保證系統的安全,海面風速信息通常可以從駕駛臺獲取。當系統采集的實時環境光強小于設定的最小經濟發電光強時,船用碟式斯特林太陽能熱發電裝置做出相應處理,等待光強達到設定閥值時再次運行。
3.2 跟蹤控制原理
跟蹤系統采用高度角-方位角雙軸混合跟蹤的控制方式,通過GPS接收器,實時獲得船舶所在地的經緯度以及UTC時間;通過開環的程序跟蹤,計算出太陽高度角和方位角,確定太陽當前的位置;輸出PWM信號,驅動轉向機構的水平與俯仰電機,使碟式聚光器達到預期位置,完成視日運動軌跡跟蹤,實現對太陽的初步跟蹤;當船舶航向改變時,電子羅盤通過接口輸出角度變化量,由單片機采集電子羅盤輸出的角度值,進行各種判斷、處理,同時發出指令給回轉系統,驅動碟式聚光器回轉到船舶航向改變前的朝向;采用光電二極管對碟式聚光器做自動定位和誤差校正,進行閉環控制,實現光電跟蹤。通過微調聚光器的位置,確保太陽光通過碟式聚光器聚焦都落在斯特林發動機的接收器上,以保證發電裝置光電轉換效率的最大化。跟蹤系統組成原理框圖見圖5。
以STM32 F3為主控制器,實現混合控制的主程序是一個無限循環程序,它能實現運行后根據太陽角度調整船用碟式斯特林太陽能發電裝置碟式太陽跟蹤聚光器的方位,根據反饋信號進行微調,產生PWM信號驅動電機轉動,實現太陽跟蹤。當監測到有中斷產生時,主程序停止運行,中斷程序設計包括天氣危害檢測處理、船舶航向改變處理和超出跟蹤時間區間處理等,中斷程序完成后再回到主程序。主程序流程見圖6。
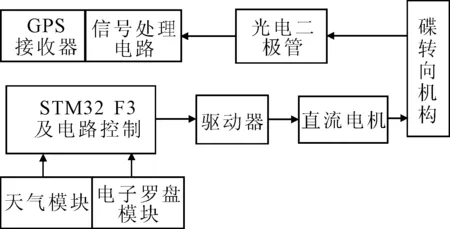
圖5 跟蹤系統組成原理
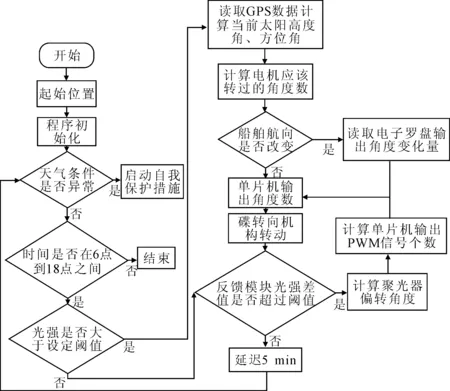
圖6 主程序流程圖設計
4 結論
在實際船舶航行試驗中,采用直徑為1.5 m的碟式聚光反射鏡作為聚光器,聚光跟蹤控制系統能準確將太陽光斑匯集聚焦到斯特林發電機的接收器上,隨著太陽角度變化及船舶航向的變化,該光斑能夠一直保持在斯特林發電機的接收器上。光斑的偏離誤差保持在1 cm以內,系統的跟蹤精度控制在1°以內,滿足了船用碟式斯特林太陽能熱發電系統的發電要求,實現了船舶在航行過程中對太陽的全自動跟蹤,顯著提高了船用碟式斯特林太陽能熱發電裝置對太陽能的利用效率,聚光器接收到的太陽輻射總量較固定式平均提高了約30%,初步達到了預期目的。
為了使碟式斯特林太陽能熱發電技術更好地應用于船舶上,今后應當在提高太陽跟蹤控制系統的穩定性和降低斯特林發電機成本兩個方面還應該更加深入地開展實驗研究工作。
[1] 魏 喬.船用光伏發電系統最大功率跟蹤及自動跟蹤控制研究[D].武漢:武漢理工大學,2012.
[2] 廖 葵,龍新峰.基于小型發電機的碟式太陽能熱發電技術研究進展[J].能源技術,2007,28(5):275-278.
[3] 李 鐵.碟式聚光太陽能熱發電系統用斯特林發動機的研制[D].北京:中國科學院研究生院,2011.
[4] 范偉成,宗 情,彭小方,等.碟式斯特林太陽自動跟蹤控制系統設計[J].單片機與嵌入式系統應用,2012,12(10):70-73.
[5] 林明春,夏桂鎖,林玉池,等.電子羅盤在全自動智能陀螺尋北儀中的應用[J].光學精密工程,2007,15(5):719-724.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45