汽車線控轉向系統中轉角傳感器的研究
2014-06-27 05:46:39秦書劍周海森賈林夕
重慶理工大學學報(自然科學) 2014年7期
劉 軍,秦書劍,周海森,賈林夕
(江蘇大學汽車與交通工程學院,江蘇鎮江 212013)
汽車線控轉向系統中轉角傳感器的研究
劉 軍,秦書劍,周海森,賈林夕
(江蘇大學汽車與交通工程學院,江蘇鎮江 212013)
使用基于 Triaxis三軸霍爾原理的角度傳感器芯片 MLX90316和單片機MC9S08DZ16,通過對軟硬件進行設計,研制出成本低廉、測量精確、抗干擾性能好,具有一定智能的非接觸式方向盤轉角傳感器。該傳感器可以為線控轉向系統的電控單元提供精確的方向盤絕對位置角度值,并且可以通過軟件計算出方向盤轉動角速度、角加速度值。
線控轉向;角度傳感器;方向盤轉角;霍爾傳感器;MLX90316;非接觸式
隨著汽車產量的增加,人們對汽車安全性、舒適性的要求也越來越高。汽車轉向系統是影響汽車操縱穩定性、駕駛舒適性和主動安全性的關鍵所在,因此新型轉向系統一直是汽車領域的研究熱點之一。線控轉向系統(steer by wire,SBW)同時兼有EPS和AFS的特征和功能。它取消了轉向盤和轉向器之間的機械連接,擺脫了機械轉向系統的限制,不僅可以對轉向系統的力傳遞特性進行設計,還可以對其角傳遞特性進行設計。因此,對提高“人-車-路”閉環系統的操縱穩定性、駕駛舒適性和主動安全性具有重要意義[1-2]。目前的研究主要集中在線控轉向的控制策略方面,很少提及方向盤角度的獲取方法[3]。實際上,方向盤角度的獲取是線控轉向的關鍵技術之一,它通過計算方向盤的轉角位置和轉角變化速率來識別駕駛員的操作意圖,從而為線控轉向控制單元提供控制動作的依據。本文設計了一種基于Triaxis三軸霍爾技術的非接觸式絕對轉角傳感器。
1 絕對轉角傳感器的原理與結構
1.1 角度傳感器工作原理
MLX90316芯片是傳感器的核心部件。該芯片采用5 V供電,具有數字串行輸出SPI功能,可輸出14 bit計算后的角度信號,其測量精度達到了12 bit的角度分辨率。
平行于芯片表面的磁場(例如B∥)可被Triaxis三軸傳感器的前端感應到。傳感器的前端包括相互正交的2對傳統平面霍爾元件和1個集磁片IMC(如圖1所示)。B∥在2個分量方向上分別測量得到BX∥和BY∥。芯片通過集磁片(IMC)將這2個平行的分量(分別為BX∥和BY∥)變換為與之成正比的2個垂直方向上的分量(分別為 BX⊥和BY⊥),再通過芯片中的傳統平面霍爾元件來測量這2個垂直分量。

圖1 Triaxis傳感器前端
當磁石(徑向磁化)在芯片表面旋轉時,MLX90316可以感應與芯片表面平行的磁場。如圖2所示,芯片傳感部分將產生2個正交的差分信號(正弦和余弦信號)。這2個霍爾信號利用經典的漂移電壓消除技術(霍爾元件四相位旋轉和斬波放大器),通過一個差分式全模擬處理鏈進行處理。經過處理的模擬信號由ADC轉換為數字信號傳輸給DSP模塊做后續處理。芯片的DSP模塊采用16bitRISC微處理器,其主要功能是對2個原始的霍爾信號通過式(1)計算其角度位置信號。

由于“ATAN”運算用于比值“VY/VX”,而由間隙、溫度以及老化等因素變化引起的磁場強度變化都將以同等程度作用于2個信號上,因此得到的角度信號本身就具有自適應補償的特點。這一特性使得該芯片相比傳統的線性霍爾芯片在溫度變化時的精確度得到了較大的提升[4-5]。
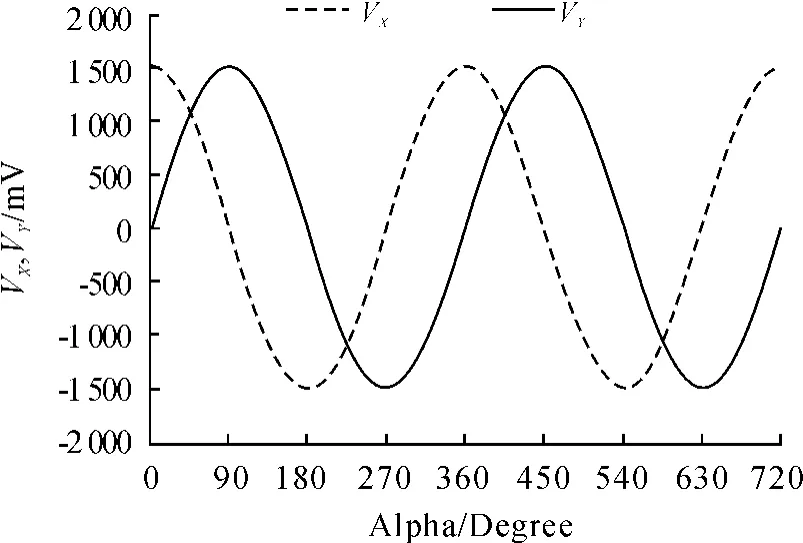
圖2 輸出信號:Vx∝cos(α),VY∝sin(α)
1.2 轉角傳感器系統結構
因為線控轉向的特性是低速行駛時轉向比率低,可以減少轉彎或停車時轉向盤轉動的角度。因此,線控轉向中方向盤一般轉角為±540°,而MLX90316轉角傳感器的測量范圍是 -180°~180°。為了將方向盤的轉動角度和傳感器的角度唯一對應起來,采用了1∶4的傳動比[6]。
如圖3所示:轉角傳感器的齒輪1與電機的轉向柱固定連接;齒輪1與齒輪2相嚙合,其傳動比是1∶2;齒輪2與齒輪3通過轉軸1固連在一起;齒輪3與齒輪4又相嚙合,其傳動比也是1∶2,這樣就得到了1∶4的傳動比。
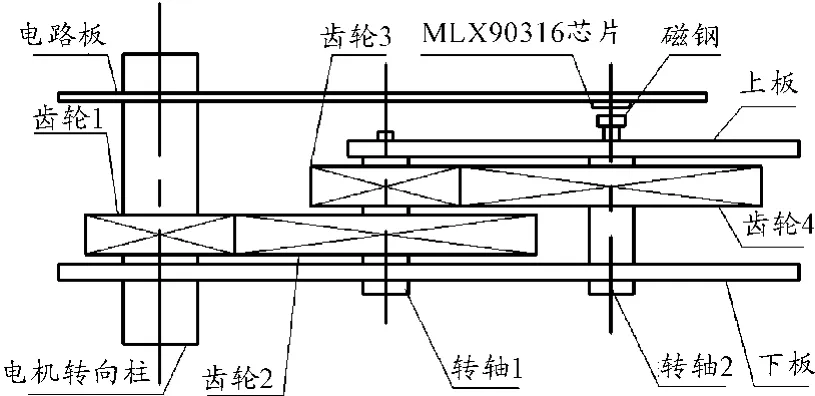
圖3 角度傳感器結構示意圖
2 角度傳感器電路硬件設計
電路中需要采用芯片MLX90316來感應磁鋼轉動時的磁場變化,并將該變化轉化成方向盤轉角。電路硬件部分要實現的功能是捕獲磁場的轉動量并將其轉換為方向盤的轉角。本文選用轉角芯片MLX90316和單片機MC9S08DZ16來分別完成以上任務。MC9S08DZ16是飛思卡爾公司的8位單片機,自帶功能豐富。在本系統中主要利用了單片機的SPI模塊和MLX90316進行數據傳輸。在傳感器和單片機之間傳輸數字型數據意味著可以降低易感性干擾。MC9S08DZ16還可以通過CAN總線模塊和其他模塊進行通信[7]。CAN總線的部分接口電路如圖4所示。
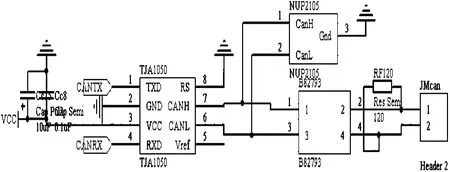
圖4 CAN總線的部分接口電路
單片機以主機身份通過 SPI接口接受MLX90316傳來的數據,并轉變成相對應的方向盤角度值,通過CAN總線與發動機的ECU進行通信,將數據發送給ECU。
3 角度傳感器軟件設計
3.1 系統軟件流程
系統軟件流程主要包括處理器初始化模塊、預置的FLASH數據讀取模塊、MLX90316的數據轉換模塊、CAN總線數據傳輸模塊以及傳感器中斷置零模塊[8],如圖5所示。
3.2 方向盤絕對位置轉角計算程序
當傳感器安裝到驅動電機轉向柱上時,磁鋼與方向盤的位置角度值一一對應,則方向盤的回正位置對應一個磁鋼的位置角度值,將此角度設為絕對零度α0。傳感器安裝后,先將方向盤轉到回正位置,此時通過外部按鍵產生置零中斷,從中斷處讀取數值并存入FLASH中。之后每次上電均讀取該值作為方向盤絕對位置角度計算的參考零點,這樣即可計算出方向盤的絕對位置轉角。

圖5 系統軟件流程
磁鋼相對于參考零點的轉角為:Absolute_Angle=α-α0;方向盤的絕對轉角:Steer_Angle=(α-α0)×4;傳感器通過讀取下一次的角度Absolute _Angle減去前一次讀取的Pre_Absolute_Angle的差的正負就可以判斷方向盤的轉動方向,并且還可通過積分或者微分的原理計算出轉動的角加速度和角速度[9]。方向盤絕對轉角計算的程序如下:

4 實驗結果
固定好角度傳感器,采用步進電機帶動磁鋼進行轉動,每隔15°進行方向盤實際角度的測量。實際角度值和誤差的關系如圖6所示。
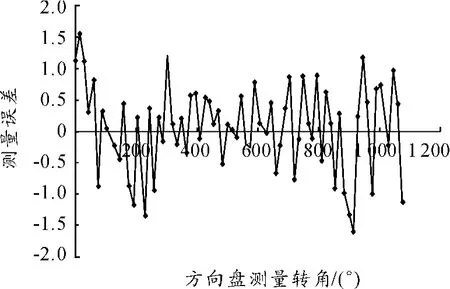
圖6 方向盤轉角測量誤差
5 結論
由實驗分析結果可知:該非接觸式方向盤轉角傳感器基于三軸霍爾原理設計,可以滿足線控對轉向方向盤角度的讀取需要,具有測量精度合理、測量范圍廣、可靠性高、成本低等優點,為線控轉向控制協調打下了基礎。
[1] 何仁,李強.汽車線控轉向技術的現狀與發展趨勢[J].交通運輸工程學報,2005,5(2):68-72.
[2] 于蕾艷,林逸,施國標.汽車線控轉向系統的結構分析[J].農業裝備與車輛工程,2008(4):20-38.
[3] 石沛林,唐紹豐,邱緒云,等.線控轉向車輛轉向控制策略研究[J].機械設計與制造,2011,(11):104-106.
[4] Melexis Microelectronic Integrated System.MLX90316 Rotary Position Sensor IC[Z].2009.
[5] 朱何,李勝,阮健.基于Mlx90316的電-機械轉換器角位移測控系統[J].機電工程,2012,29(9):1046-1060.
[6] 張英福.巨磁電阻在方向盤轉角傳感器中的應用[J].重慶工學院學報:自然科學版,2009,23(10):17-20.
[7] 孟黎明,楊勝兵.基于CAN總線和巨磁阻的汽車踏板角度傳感器研究[J].湖北汽車工業學院學報,2012,26(1):6-9.
[8] 李浩,徐衍亮.電動汽車方向盤絕對角位置傳感器的研究[J].傳感器與微系統,2011,30(3):32-34.
[9] 王俊,楊勝兵,過學迅.汽車方向盤轉角傳感器系統設計及算法研究[J].湖北汽車工業學院學報,2011,25 (1):19-21.
(責任編輯 劉 舸)
Steering Wheel Angle Sensor in Vehicle Steer-by-Wire(SBW)System
LIU Jun,QIN Shu-jian,ZHOU Hai-sen,JIA Lin-xi
(School of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China)
Using the magnetic sensor chip MLX90316 and the MC9S08DZ16 based on the Triaxis Hall Technology,a non-contact and intelligent steering angle sensor is built,which has advantages of cheap costs,great precision and anti-jamming performance.This steering angle sensor can provide an accurate angle value of steering wheel absolute position for SBW(steer-by-wire).By software,the direction,speed and acceleration of turning the steering wheel can be computed.
SBW;angle sensor;steering wheel angle;Hall sensor;MLX90316;non-contact
U463.4
A
1674-8425(2014)07-0001-04
10.3969/j.issn.1674-8425(z).2014.07.001
2014-01-08
劉軍(1968—),男,江蘇靖江人,博士,教授,主要從事汽車電子方面的研究。
劉軍,秦書劍,周海森,等.汽車線控轉向系統中轉角傳感器的研究[J].重慶理工大學學報:自然科學版,2014(7):1-4.
format:LIU Jun,QIN Shu-jian,ZHOU Hai-sen,et al.Steering Wheel Angle Sensor in Vehicle Steer-by-Wire (SBW)System[J].Journal of Chongqing University of Technology:Natural Science,2014(7):1-4.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50