一種檢查機載LiDAR平面精度的新方法
2014-06-27 05:47:13馬洪超
測繪通報 2014年7期
關鍵詞:標的
馬洪超,張 良,高 廣,程 壘
(1.武漢大學遙感信息工程學院,湖北武漢 430079;2.武漢大學測繪遙感信息工程國家重點實驗室,湖北武漢 430079;3.北京東方道邇信息技術股份有限公司,北京 100080)
一種檢查機載LiDAR平面精度的新方法
馬洪超1,2,張 良1,高 廣1,程 壘3
(1.武漢大學遙感信息工程學院,湖北武漢 430079;2.武漢大學測繪遙感信息工程國家重點實驗室,湖北武漢 430079;3.北京東方道邇信息技術股份有限公司,北京 100080)
針對LiDAR工程常規精度檢查方法難以精確評價LiDAR水平精度,試驗性質的特殊地標成本高昂、無法有效推廣的現狀,從機載LiDAR數據的三維特點和具體工程需求出發,提出一種基于十字地標的機載LiDAR平面精度檢查方法,針對地標尺寸和點云密度進行尺度分析,用以指導地標的精確設計以節約成本。試驗證明,本文提出的方法可有效檢驗機載LiDAR的水平精度,而且成本低廉,可推廣性和重用性強,具有較高的實用價值。
LiDAR;精度評價;十字地標;尺度分析
一、引 言
機載激光雷達(LiDAR)是一種新型的主動型航空對地觀測傳感器,它融合了全球定位系統、慣性導航系統和三維激光掃描系統,可直接快速地獲取高精度地表三維幾何信息[1]。近十年來,該技術已逐漸在大比例尺地形圖測繪、災害評估、數字城市等方面取得了廣泛的應用[2-4]。與其他空間數據獲取技術一樣,客觀精確地評價機載LiDAR數據質量,是LiDAR技術應用的重要保障手段[5]。
LiDAR數據的誤差可分為相對誤差和絕對誤差。相對誤差指LiDAR點云不同航帶間的相對偏差,可通過剖面手工檢校或航帶平差進行誤差評定和消除,目前國內外大部分研究工作也集中在相對誤差的消除方面[6-9]。由于 LiDAR點云分布不規則,其密度也不是特別均勻,在LiDAR點云中選取控制點或連接點,難以像高分辨率影像那樣可精確選取影像特征點作控制點或連接點,因此LiDAR點云的絕對誤差需要通過點云擬合地表面后再與布設的檢查點比較評判[10-11]。同時,目前常規的方法只能精確評價LiDAR高程精度,其水平精度的評判需要設計特殊的地標。Csanyi和Toth設計了一種特殊的圓形地標[12](如圖1所示),通過測量圓形地標實際中心點和基于地標上點云擬合中心的距離,檢查點云的平面精度。該方法的前提是保證足夠多的點云打到圓形地標上,現階段的國內LiDAR工程為了節制成本,航高通常大于1000 m,點云密度較小,圓形地標需要設計得很大,成本高昂且攜帶不便。因此目前LiDAR點云的水平精度常常僅通過設備廠商提供的參考精度或光斑直徑進行估算,嚴密性遠遠不夠。隨著LiDAR技術應用的不斷深入,Li-DAR水平精度評價體系的缺失已逐漸成為該技術進一步推廣的障礙之一。

圖1
基于上述討論,本文從機載LiDAR數據的三維特點和具體工程需求出發,設計了一種基于十字形地標的機載LiDAR平面精度檢查方法;同時為了節約地標制作和攜帶成本,針對地標的尺寸和點云密度進行了尺度分析,用以指導地標的精確設計;最后在浙江某地進行了野外試驗,以驗證該方法的實際運行效果。
二、基于十字形地標的平面精度檢查
本文通過十字形地面標志物,利用地標上的點云擬合兩條直線,取直線交點為中心點,然后和實測
1.十字形地物標志設計
1)表1為本文實際量測的常見介質對波長為900 nm的激光的反射率。通常地標布設在反射率較低的瀝青路面或其他裸露地面上。為了確保地標在點云和對應的影像中可以清楚辨識及精確定位,地標材料一般選擇顏色與周圍環境有較大差別且反射明顯比周圍地物強出許多的材質,如白色布料、白色烤漆板等。
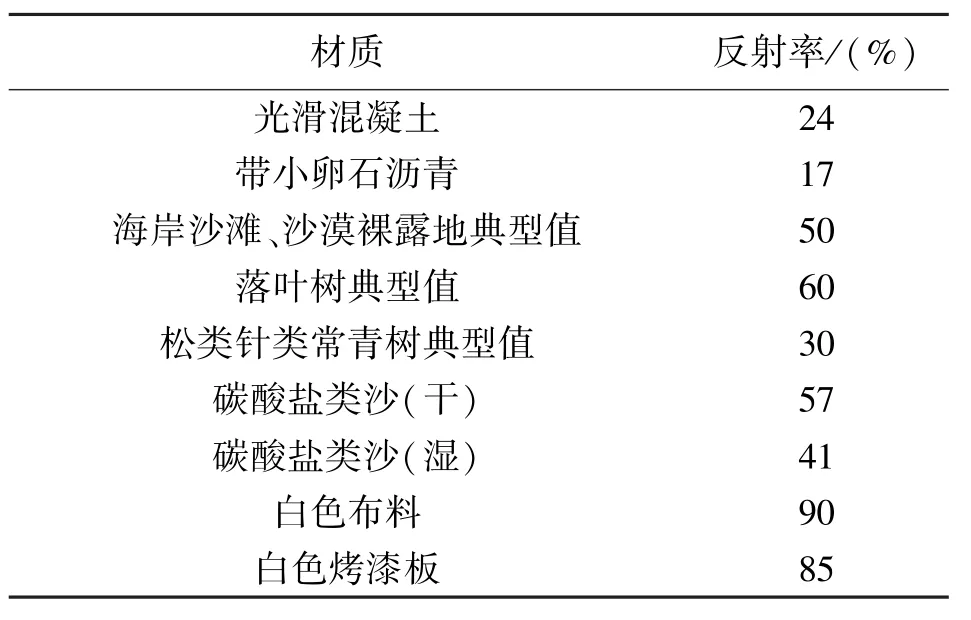
表1 常見介質對波長為900 nm的激光的反射率
2)地標形狀為十字形,為了方便裝卸和攜帶,并提高重用性,設計為一個多塊正方形板材的組合(如圖2所示)。

圖2 十字形地標設計
3)為了保證最后擬合中心點的精度,需要確定地標的最小范圍。地標的十字線寬至少為點云間距寬的1.25倍,其十字線長至少為點間距的10倍(參考第三節)。
2.十字形地標布設
根據航線規劃確定布設十字形地標的位置分布及點數,做到盡量在測區均勻分布且個數達到一定的數量。為了獲取更多的點信息,地標盡可能地布設在航帶重疊區域,并確保該區域為連續反射屬性的平坦地表,與周圍高程差較大且無房屋樹木遮擋。
3.十字形地標的中心坐標量測
按步驟1、2布設完地標之后,利用GPS RTK采集量測每個地標中心點的三維坐標。目前RTK采集三維點水平精度為厘米級,LiDAR點云的水平精度為分米級,該測量方式可滿足水平精度檢查的需要。
4.機載LiDAR對地表進行半隨機離散掃描
根據作業要求開始機載LiDAR飛行作業,對布設了十字形地標的地表進行半隨機離散掃描,獲取該區域的離散點云數據,用于后續的數據處理。
5.基于實測點云數據提取地標中心點
1)根據航空影像和地標附近特殊的高程變化特征尋找地標的大致位置。
2)根據強度反射特征提取落于地標上的點云。
3)通過十字交叉面內的點云擬合直線,求取兩直線的交叉點,即地標的中心點。
6.基于十字形地標的平面精度檢查與質量評定
假定實際量測地標的中心坐標為真值,其中心坐標為(xio,yjo),基于點云擬合的中心坐標為(xi,yj),則每個點的誤差為

按該公式計算每個點的水平誤差,并統計LiDAR點云的平均誤差、中誤差等參數。
三、尺度分析
通過十字交叉面內的點云擬合直線,取兩直線交點為十字形地標中心點。顯然,中心點的擬合精度主要受LiDAR平均點間距和地標尺寸兩方面因素的制約。若點間距很小、地標尺寸足夠大,擬合的中心點精度基本能符合要求,但成本高昂;反之則擬合精度過低,無法滿足精度評定的要求,造成試驗失敗。本文稱這個問題為尺度分析,即考慮什么樣的地標尺寸能夠以盡量小的成本達到較高的擬合精度。LiDAR點云的平均點間距與航高成正比,平面精度和航高呈近似的反比關系,因此只需選擇某航高的點云進行虛擬的地標中心擬合精度估算,得出該航高下地標長、寬的最優配置,然后在實際工程中按航高大小依比例放大、縮小地標。詳細步驟如下:
1)選取一塊或多塊能夠反映實測數據特征的點云數據。
2)根據第二節闡述的規范,在點云數據中均勻放置虛擬十字地標框(如圖3所示)。
3)利用地標框內點云數據自動擬合兩條相交直線,并計算擬合點與實際中心點的偏差。
4)重復步驟2)、3)足夠多次,統計地標中心的擬合精度。
5)更改虛擬十字形地標框尺寸,重復步驟2)—步驟4),統計地標中心的擬合精度,獲取該航高(平均點間距)條件下中心點擬合精度與地標尺寸的尺度關系。
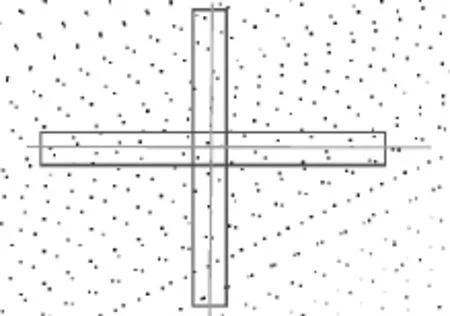
圖3 虛擬十字形地標框
尺度分析的試驗數據由Leica ALS50獲取,平均航高約1500 m,平均點間距約0.8 m,在該航高下,設備廠商標稱的水平精度約為25 cm。首先驗證地標寬度和擬合精度的關系,為了忽略地標長度的影像,地標長度設置足夠長(本文為50 m),通過不同的地標寬度值,分別計算擬合中心點和實際中心點的差值,其結果見表2。
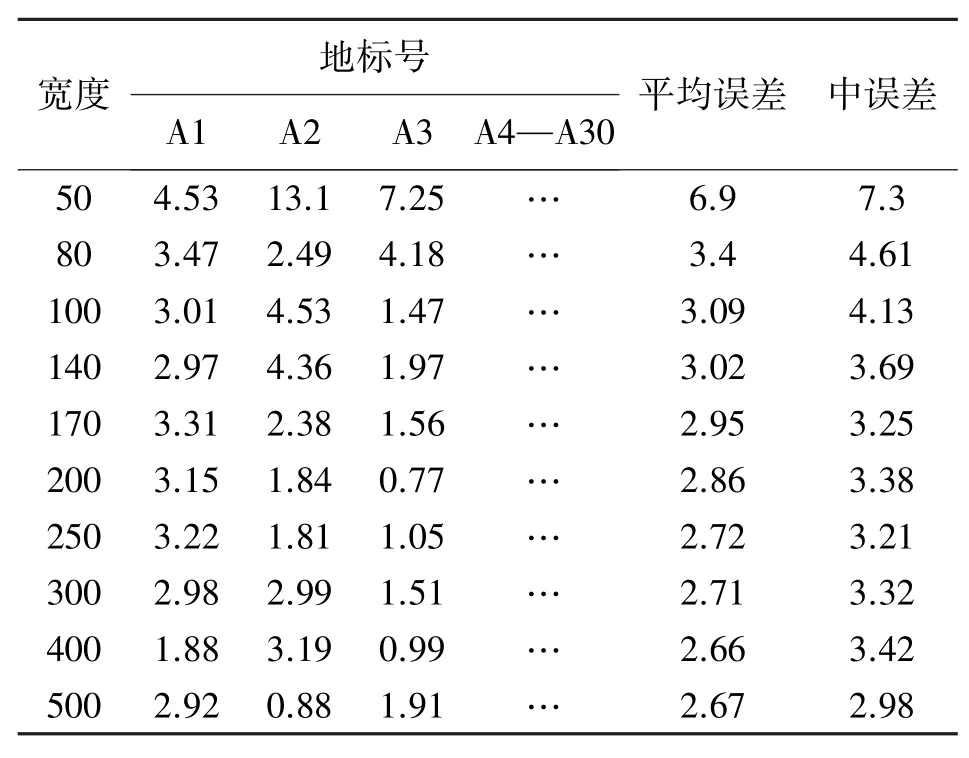
表2 不同地標寬度下的中心點擬合精度 cm
由表2可知:當地標長度一定時,地標寬度越大,中心點擬合精度越高;擬合誤差最低能達到平均點間距的 3.35%和設備廠商標稱水平誤差的10.68%;當地標寬度為平均點間距的1.25倍時,平均擬合誤差達設備廠商標稱誤差的12.4%。確定地標寬度為110 cm,分別設置不同的地標長度進行誤差分析,其精度結果見表3。
由表3可知:當地標寬度一定時,地標長度越長,擬合精度越高。綜合表2、表3可得,取地標寬度取點間距的1.25倍,地標長度取點間距的10倍,平均擬合誤差為平均點間距的4.8%和系統標稱平面誤差的15.4%,基本滿足水平精度檢查要求,該配置可作為地標設計的最低要求。

表3 不同地標長度下的中心點擬合精度 cm
四、野外試驗與分析
為了驗證本文提出的精度檢查方法的實際效果,筆者于2013年3月在浙江某城鎮郊區進行了野外工程試驗,利用Leica ALS70 HP機載三維激光掃描儀獲取點云與同機影像數據(如圖4所示)。其中,LiDAR點云按強度配色顯示,地標強度與周邊地標迥異,辨析度良好。
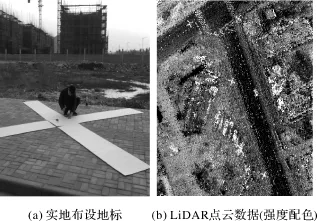
圖4 試驗數據(局部)
本試驗中,十字形地標寬度為0.6 m,長度為6 m (滿足1200 m航高下地標尺寸最低要求),航線設計飛行高度分別600 m和1200 m,每個高度來回飛行一次以獲取更豐富的點云,航線重疊度為100%。由于設備臨時出現故障,最后只成功獲取1200 m航高點云和同機影像。按照前面闡述的方案進行水平精度檢查和中心點擬合精度的估計,最后的檢查結果見表4。
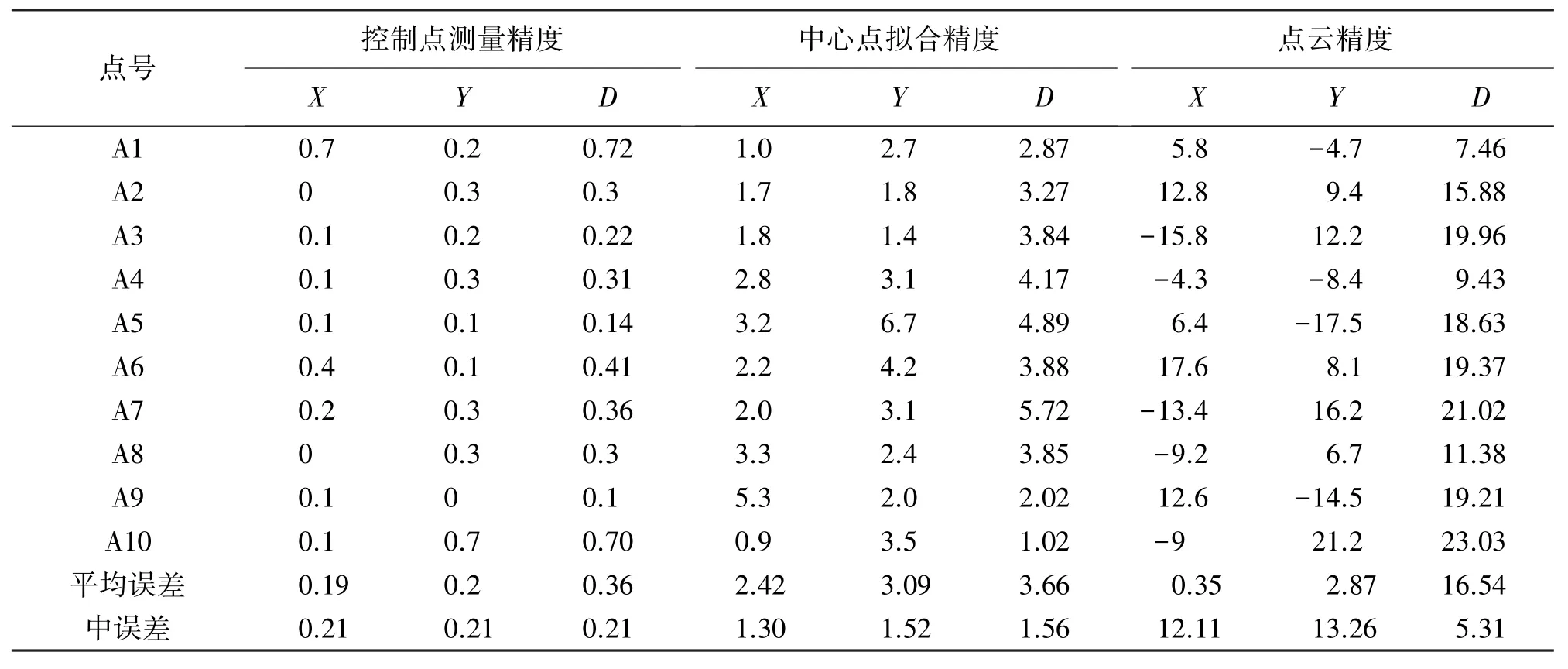
表4 基于十字形地標的點云精度檢查結果 cm
由表4可知:①通過GPS RTK方式量測中心點,在測量條件較好的情況下,水平精度達到了毫米級,完全滿足 LiDAR水平精度評價的要求;②在1200 m的航高,設備廠商標稱其水平精度約15 cm,由于系統故障,試驗沒有成功獲取到600 m航高的點云,原設計的地標只滿足了1200 m航高下地標的最低要求,在該航高下點云的中心點擬合精度3.66 cm,約為設備廠商在該航高標稱水平精度的24.4%,中心點的擬合誤差偏大,但仍然基本滿足水平精度評估的要求;③共統計了10個地標,X方向平均誤差0.35 cm,Y方向平均誤差2.87 m,各項誤差近似隨機分布,沒有明顯的方向性,可認為本批次試驗數據沒有系統性的偏差。最后統計出的平均誤差為16.54 cm,略大于設備的標稱精度,暫考慮為設備本身工藝的局限、飛機振動的影響或系統檢校的影響,可見本文方法能較準確地檢查LiDAR點云平面精度,但無法精確定位誤差源并有效消除。
五、結束語
通過以上試驗及分析,得出以下結論:本文提出的十字形地標方案能夠有效地評價點云的平面精度。本文方法成本低廉,便攜性好,可重復使用。在城市地區,道路的斑馬線也可作為臨時地標使用。與圓形地標相比,工程實用性、可推廣性更高。
目前Leica公司的掃描型機載LiDAR是國內市場占有率最高的設備,考慮到試驗成本等因素,本文首先使用Leica公司最新型LiDAR設備ALS70 HP進行平面精度檢查試驗。不同的LiDAR掃描方式可導致不同的點云分布和不同的誤差分布。為了更好地驗證本方法的實用價值,下一步需要利用不同的機載LiDAR設備,在更豐富的飛行條件下繼續試驗。本文方法適用于大部分平地LiDAR點云的水平精度評價,如何進行山區點云平面精度檢查,還需要作進一步的研究。
[1] AXELSSON P.Processing of Laser Scanner Data——Algorithms and Applications[J].ISPRS Journal of Photogrammetry and Remote Sensing,1999,54(2-3):138-147.
[2] MOHD D N,MAAROF I,LATIF Z A,et al.LiDAR:A Review on Generating Digital True Orthophoto[C]∥Proceedings of IEEE 7th International Colloquium on Signal Processing and Its Applications(CSPA).Penang:IEEE,2011:336-340.
[3] 程亮,龔健雅,李滿春,等.集成多視航空影像與Li-DAR數據重建 3維建筑物模型[J].測繪學報,2009,38(6):494-501.
[4] 馬洪超.激光雷達測量技術在地學中的若干應用[J].地球科學:中國地質大學學報,2011(2):347-354.
[5] HABIB A,BANG K I,KERSTING A P,et al.Error Budget of LiDAR Systems and Quality Control of the Derived Data[J].Photogrammetric Engineering&Remote Sensing,2009,75(4):1093-1108.
[6] FILIN S,VOSSELMAN G.Adjustment of Airborne Laser Altimetry Strips[J].The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,2004,35(B3):285-289.
[7] 王麗英,宋偉東.機載LiDAR數據的LZD航帶平差[J].中國圖象圖形學報,2012,17(2):279-285.
[8] 鄔建偉,馬洪超.機載LiDAR激光束與掃描鏡對準誤差影響分析[J].紅外與激光工程,2008,37(2):243-246.
[9] 陳剛,田玉剛,程新文,等.山區LiDAR高程精度野外檢驗的一種新方法[J].測繪通報,2008(2):41-43.
[10] HODGSON M E,BRESNAHAN P.Accuracy of Airborne LiDAR Derived Elevation:Empirical Assessment and Error Budget[J].Photogrammetric Engineering and Remote Sensing,2004,70(3):331-339.
[11] WOTRUBA L,MORSDORF F,MEIER E,et al.Assessment of Sensor Characteristics of an Airborne Laser Scanner Using Geometric Reference Targets[C]∥Proceedings of ISPRS Working GroupⅢ/3 Workshop Laser Scanning.Enschede:[s.n.],2005:1-6.
[12] CSANYI N,TOTH C.Improvement of LiDAR Data Accuracy Using LiDAR-specific Ground Targets[J].Photogrammetric Engineering&Remote Sensing,2007,73 (4):385-396.
[13] 張靖,江萬壽.基于虛擬連接點模型的機載LiDAR系統安置誤差自檢校[J].測繪學報,2011,40(6):762-769.
A New Method for Airborne LiDAR Plane Precision Evaluation
MA Hongchao,ZHANG Liang,GAO Guang,CHENG Lei
P237
B
0494-0911(2014)07-0014-04
馬洪超,張良,高廣,等.一種檢查機載LiDAR平面精度的新方法[J].測繪通報,2014(7):14-17.
10.13474/j.cnki.11-2246.2014. 0215中心點進行對比,以評估LiDAR點云的平面精度。具體的試驗步驟和要求如下。
2013-04-23
973計劃(2009CB72400401C);國家科技支撐計劃(2012BAH34B02);武漢大學研究生自主科研項目(2012213020203;2012213020209)
馬洪超(1968—),男,浙江嵊州人,博士,教授,研究方向為機載LiDAR數據處理與應用、高分辨率遙感影像處理。
張 良
猜你喜歡
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
制造技術與機床(2019年11期)2019-12-04 05:50:42
證券市場紅周刊(2018年38期)2018-05-14 23:41:07
證券市場紅周刊(2018年41期)2018-05-14 18:45:56
證券市場紅周刊(2018年33期)2018-05-14 16:47:08
證券市場紅周刊(2018年26期)2018-05-14 16:47:04
證券市場紅周刊(2018年11期)2018-05-14 16:39:55
證券市場紅周刊(2018年10期)2018-05-14 15:42:33
證券市場紅周刊(2018年5期)2018-05-14 14:45:46
證券市場紅周刊(2018年4期)2018-05-14 14:02:24
