一種新型的便攜式交通事故現場快速勘查系統
2014-06-27 05:47:18劉文超胡孟夏李一兵
測繪通報 2014年7期
劉文超,王 巖,胡孟夏,李一兵
(公安部道路交通安全研究中心,北京 100062)
一種新型的便攜式交通事故現場快速勘查系統
劉文超,王 巖,胡孟夏,李一兵
(公安部道路交通安全研究中心,北京 100062)
交通事故現場勘查對特征數據采集和重建分析鑒定至關重要。筆者設計構建了一套基于雙目立體視覺原理的便攜式交通事故現場快速勘查系統,通過對普通定焦數碼相機進行預標定的方式實現交通事故現場無標尺勘查取證,現場處理數據輸出現場圖,測量誤差小于1%。系統勘測數據為目標點的三維坐標,可直接用于事故現場的三維重建。該系統工作耗時短,可緩解現場勘查引起的交通擁堵,可實現補測、勘誤等二次處理,適用于重特大交通事故現場的勘查取證工作。
無標尺;雙目立體視覺;參數標定;交通事故現場
一、引 言
道路交通事故關系到廣大人民群眾的生命財產安全,在全世界范圍內受到廣泛關注。交通事故現場勘查作為事故調查分析的重要組成部分,采集取證第一手的數據材料,直接影響事故再現分析與鑒定的精確度和真實性;另一方面,現場勘查作業效率決定了現場封鎖時間,進而影響著交通擁堵的可能性和嚴重程度。
筆者設計并構建了一種基于雙目立體視覺原理的便攜式無標尺交通事故現場快速勘查系統,采用分步預標定雙目普通定焦數碼相機內外部參數的方式,無須對交通事故現場進行預處理(擺放標志物或標定物等),即可實現通過雙目圖像同步采集獲取現場目標點三維坐標數據的勘查取證作業,并通過配套開發的現場圖繪制軟件輸出符合國標的交通事故現場圖[1]。
二、需求分析與結構設計
1.交通事故現場快速勘查需求特性分析
交通事故現場勘查取證的核心需求是準確高效、輕便簡易,要求勘查設備在有限的時間內全面客觀準確地采集現場包括人、車、路等事故相關元素的位置、尺寸、距離等數據信息。傳統勘查方式以皮尺粉筆為主要工具,依賴作業經驗評判勘查元素,勘查結果因人不同差異性明顯,且一般不可補測或勘誤。邊勘邊測邊記錄的作業模式耗時較長,勘查人員勞動強度大,易引發和加劇由于封鎖現場導致的交通擁堵。
基于雙目立體視覺原理的事故現場勘查是將圖像的灰度信號通過耦合裝置(CCD)轉換為數字信號,應用圖像處理、模式識別、人工智能及計算機視覺等方法獲取目標元素的世界坐標[2]。勘查工具的設計原則應包括勘測精度高、作業速度快、操作簡易攜帶方便等特性。
2.便攜式交通事故現場勘查設備結構設計
便攜式交通事故現場快速勘查系統(以下簡稱勘查系統)包括現場勘查設備和配套的現場圖繪制軟件兩部分。現場勘查設備包含圖像采集模塊、觸發控制模塊、集中顯示模塊和輔助模塊,現場圖繪制軟件能夠調用雙目現場勘查圖像攝影測量的世界坐標數據,用以標注現場圖元素的尺寸和位置信息。現場勘查設備的圖像采集模塊為兩部非量測定焦數碼相機(RICOH GRD III),相距約80 cm(即基線長度),通過外接快門線和顯示屏實現雙目拍攝的一鍵式同步觸發和勘查視野的集中顯示,集成安裝平臺和獨腳支架用于支撐、轉移等輔助功能。圖1為現場勘查設備工業樣機的實物外觀。

圖1 現場勘查設備工業樣機實物外觀
現場勘查設備整備質量(含獨腳支架)為2.2 kg,抵達事故現場后只需連接獨腳支架、觸發外置快門即可啟動設備,采集雙目勘查圖像。由于采用了參數預標定的技術路線[3],無須對事故現場進行預處理(如擺放標志物或標定物等)即可直接勘查取證,全程只需一名勘查人員,在提高工作效率的同時還降低了現場勘查的勞動強度。
3.現場勘查與圖像處理工作流程
交通事故現場勘查取證一般以交通事故現場圖的形式呈現結果,勘查系統配套開發的現場圖繪制軟件采用符合國標的符號庫[4],通過調用事故現場元素圖形符號,標注其尺寸位置數據的形式繪制并輸出交通事故現場圖。勘查系統的攝影測量模塊基于雙目圖像攝影測量的三維世界坐標數據計算交通事故現場元素的位置尺寸信息,用于現場圖的繪制,作為“測”和“繪”的溝通橋梁,是整個勘查系統的核心技術組件[5]。圖2為便攜式交通事故現場快速勘查系統的工作流程。
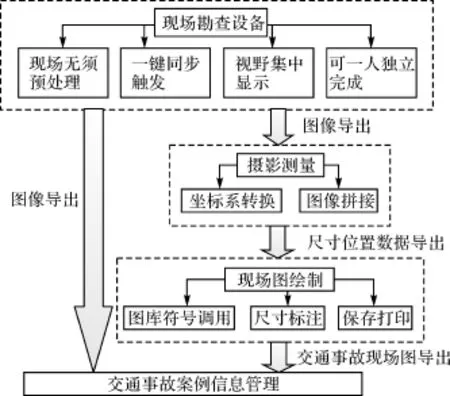
圖2 便攜式交通事故現場快速勘查系統工作流程
三、參數預標定
無標尺現場攝影勘查的技術原理是雙目數碼相機的參數預標定,具體分為內部參數標定和外部參數標定兩部分,又稱為“分步標定”[6]。內部參數標定每部相機彼此獨立,外部參數標定則需要雙目相機安裝位置固定后進行,且標定完成后兩部相機之間的相對位置不能發生改變。
1.內部參數標定
相機的內部參數標定采用2D棋盤格式標定板,9行13列,共117個標定點,如圖3所示。
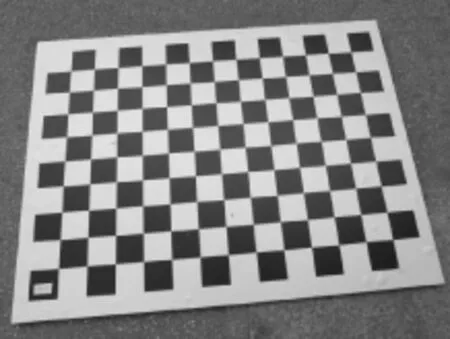
圖3 2D棋盤格式標定板
使用拓普康GTS332S全站儀測量117個標定點的世界坐標,作為內部參數標定的參考數據。使用待標定相機拍攝標定板圖像,通過標定程序累積標定結果,一般在圖像超過40幅標定結果收斂性良好時認為內部參數標定可靠。圖4為相機內部參數的標定結果。
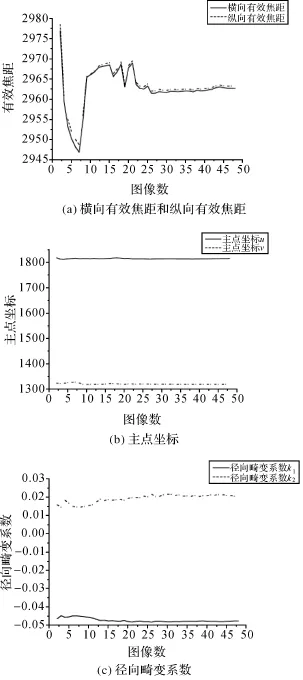

圖4 相機內部參數標定結果
理論上,橫、縱向有效焦距應近似相等,主點坐標應接近相機分辨率數值的一半,徑向和切向畸變系數應呈現出明顯的收斂性[7]。
2.外部參數標定
相機的外部參數標定是在雙目相機安裝完畢、相對位置固定的情況下進行的,且標定后兩部相機之間的相對位置不能發生改變。設計構建3D散點式標定場,共30個標定點,如圖5所示。

圖5 3D散點式標定場
使用拓普康GTS332S全站儀測量30個標定點的世界坐標,作為外部參數標定的參考數據。使用集成固定的勘查設備拍攝標定場圖像,通過標定程序標定外部參數并作歸一化處理,表1為勘查設備外部參數標定結果。

表1 勘查設備外部參數標定結果
表1中外部參數經過歸一化處理后,相當于以左目相機為基準給出右目相機的相對位置[8],具體的,由右目相機外部參數的最后一行(平移向量)可見,兩部相機的相對距離約為800 mm,與設計制作的基線長度相符。
3.測量精度驗證
設計構建試測目標,如圖6所示。

圖6 勘查設備試測目標
使用勘查設備拍攝鋼板尺和3個直立目標點A、B、D,預先測量目標尺寸信息,與攝影測量結果相對照,計算不同視距和不同方向目標的測量精度(見表2)。
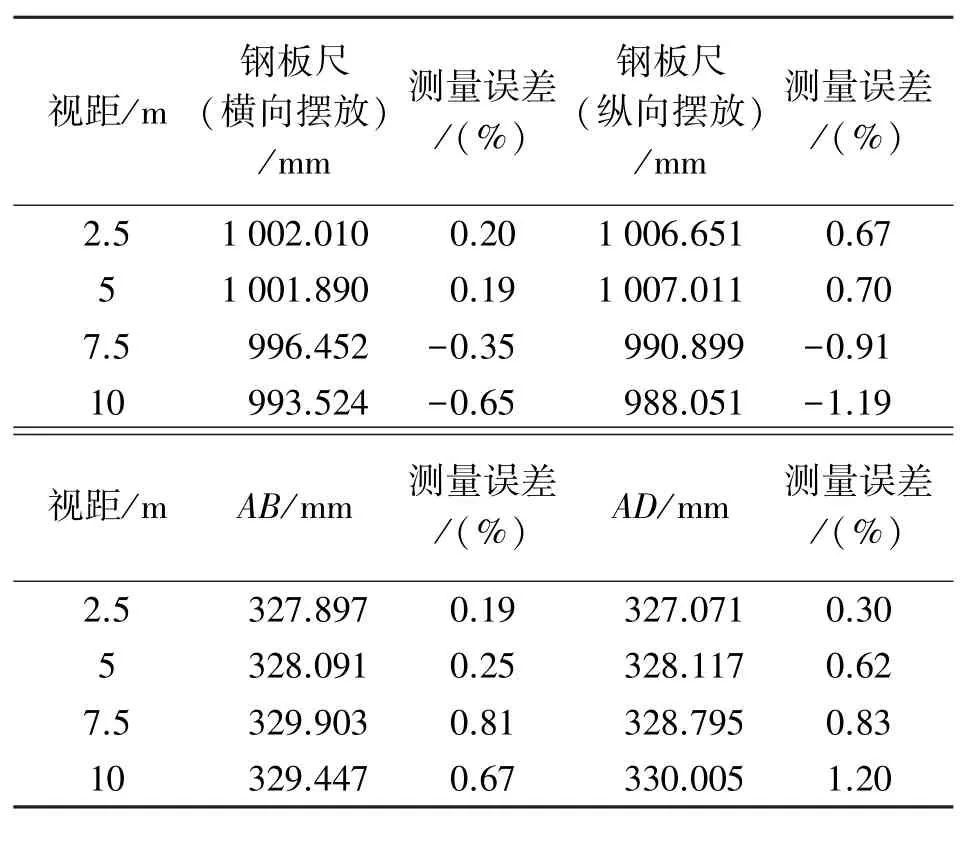
表2 勘查設備試測試驗結果
試驗表明,勘查設備在10 m范圍內的攝影測量精度基本能夠保持在1%以內,完全滿足交通事故現場勘查的精度要求。
四、模擬現場勘查取證
設計構建模擬交通事故現場,分別使用勘查系統和傳統工具進行勘查取證,具體內容見表3。
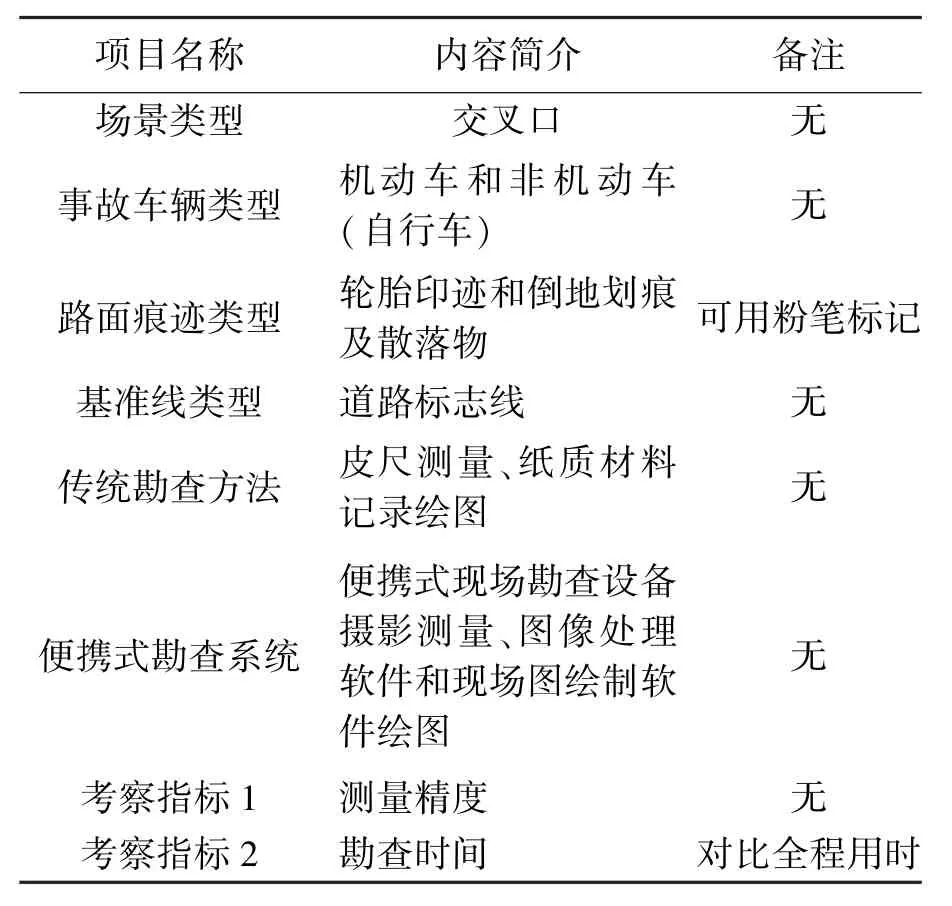
表3 模擬現場勘查實驗設計
試驗結果表明見表4,勘查系統在現場勘查取證環節的工作效率明顯優于傳統工具,現場圖繪制用時與傳統工具相近,考慮到勘查取證封鎖路面可能引發的交通堵塞、攝影測量精度的可控性和標準化、勘查系統可實現事后勘誤和補測等功能,可見攝影測量技術在交通事故現場勘查工作中的實用性和優越性。
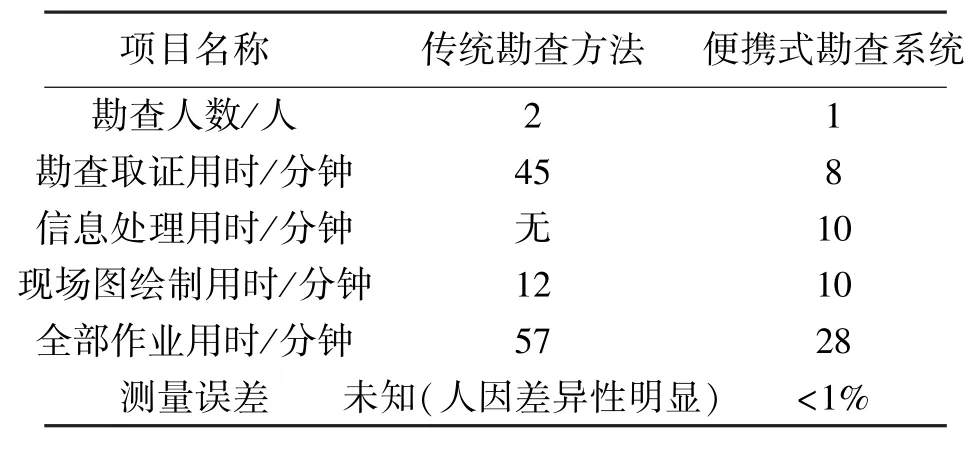
表4 模擬勘查對比實驗結果
五、結束語
基于雙目立體視覺原理的近景攝影測量技術,設計構建便攜式交通事故現場快速勘查系統,采用參數預標定的技術路線,可實現交通事故現場無標尺快速勘查取證功能。無須對事故現場進行預處理(擺放標志物或標定物等),僅需一人即可完成全部勘查流程,勞動強度低,封閉現場用時短,可有效緩解交通事故現場勘查引發的交通堵塞。攝影測量精度較高,且人為差異性小,可根據雙目勘查圖像事后對勘查結果進行勘誤或補測,圖像資料客觀真實,可信度高、還原性好,對于重特大交通事故勘查取證和再現分析意義重大。
本文依托國家科技支撐計劃(2009BAG13A07),首批工業樣機已投入山東、廣東等地區的公安交通管理部門示范應用。從應用反饋來看,現場勘查設備對氣候、光線、環境場景的適應性仍需進一步完善,攝影測量和現場圖繪制軟件的界面友好性不夠理想,持續改進系統的魯棒性和簡易性是近期工作的改進方向。
[1] 程三偉.攝影測量技術在交通事故現場快速勘查中的應用[D].長春:吉林大學,2004.
[2] 魯光泉.道路交通事故現場三維攝影測量及標定技術[D].北京:清華大學,2006.
[3] 魯光泉,李一兵.基于普通數碼相機的交通事故攝影測量技術及其研究進展[J].交通運輸工程與信息學報,2005,3(3):63-67.
[4] 中華人民共和國公安部.GA 49—2009道路交通事故現場圖繪制[S].北京:中國標準出版社,2009.
[5] 李一兵,魯光泉,趙紅蕊,等.基于雙目視覺的便攜式無標尺交通事故現場快速勘查系統:中國,ZL201120105757.9[P].2011-04-30.
[6] 胡楠,魯光泉,荔濤,等.基于分步標定法的交通事故現場攝影測量精度實驗分析[J].汽車工程,2008,30 (7):557-560,556.
[7] 蔡曉敏.基于攝影測量的事故車輛碰撞變形分析方法研究[D].北京:清華大學,2004.
[8] 劉文超,胡孟夏,王巖,等.基于雙目立體視覺的車載式交通事故現場快速勘查系統[J].汽車安全與節能學報,2012,3(3):239-244.
A New Type of Portable Investigation System in Traffic Accident Scenes
LIU Wenchao,WANG Yan,HU Mengxia,LI Yibing
P208
B
0494-0911(2014)07-0117-04
2013-04-15
國家科技支撐計劃(2009BAG13A07)
劉文超(1984—),男,遼寧鞍山人,碩士,助理研究員,研究方向為道路交通安全。
劉文超,王巖,胡孟夏,等.一種新型的便攜式交通事故現場快速勘查系統[J].測繪通報,2014(7):117-120.
10.13474/j.cnki.11-2246.2014.0241
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
