數(shù)控沖槽機的質(zhì)量平衡裝置
2014-06-29 02:27:26吳麗霞楊元軍
鍛壓裝備與制造技術(shù) 2014年1期
關(guān)鍵詞:質(zhì)量
吳麗霞,楊元軍
(1.齊齊哈爾二機床(集團)有限責(zé)任公司,黑龍江 齊齊哈爾 161005;2.齊齊哈爾軌道交通裝備有限責(zé)任公司,黑龍江 齊齊哈爾 161002)
0 引言
數(shù)控沖槽機在運動時,構(gòu)件所產(chǎn)生的不平衡慣性力將在運動副中引起附加的動壓力。這不僅會增大運動副的摩擦和構(gòu)件中的內(nèi)應(yīng)力,而且會降低機械效率和使用壽命。因此機械平衡裝置在數(shù)控沖槽機設(shè)計中具有特別重要的意義。
目前數(shù)控沖槽機在高速運動工作中機械振動非常嚴重,運動不平穩(wěn),噪聲很大。如圖1 所示,其平衡裝置加在了連桿一端,只平衡了滑塊和部分連桿的質(zhì)量,曲柄偏心部分并沒有得到平衡,因此,其運動不平穩(wěn),設(shè)備運動時噪聲大。
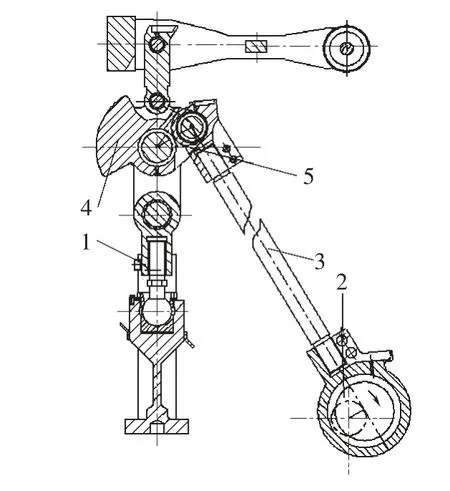
圖1 改進前結(jié)構(gòu)圖
1 平衡裝置的改進
為克服上述不足,本文所述實用新型采用質(zhì)量平衡法,如圖2 所示,將質(zhì)量平衡裝置加在曲柄偏心的相反側(cè),這樣配重1 既能平衡滑塊和連桿的質(zhì)量又能平衡曲柄的質(zhì)量。
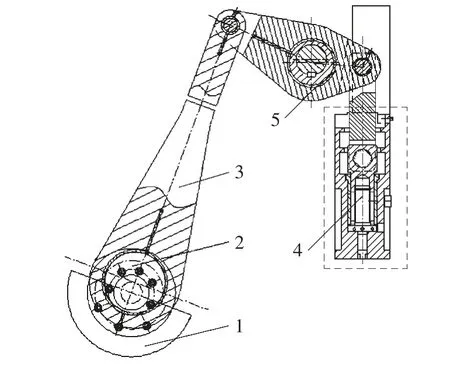
圖2 改進后結(jié)構(gòu)圖
如圖3 所示,m3和m4作固定角度擺動,當(dāng)連桿和滑塊繞固定支點擺動時,可以看成他們的運動能夠互相抵消一部分。如果能夠求出其未抵消的那部分質(zhì)量,也就是本文所求的需要平衡的質(zhì)量。
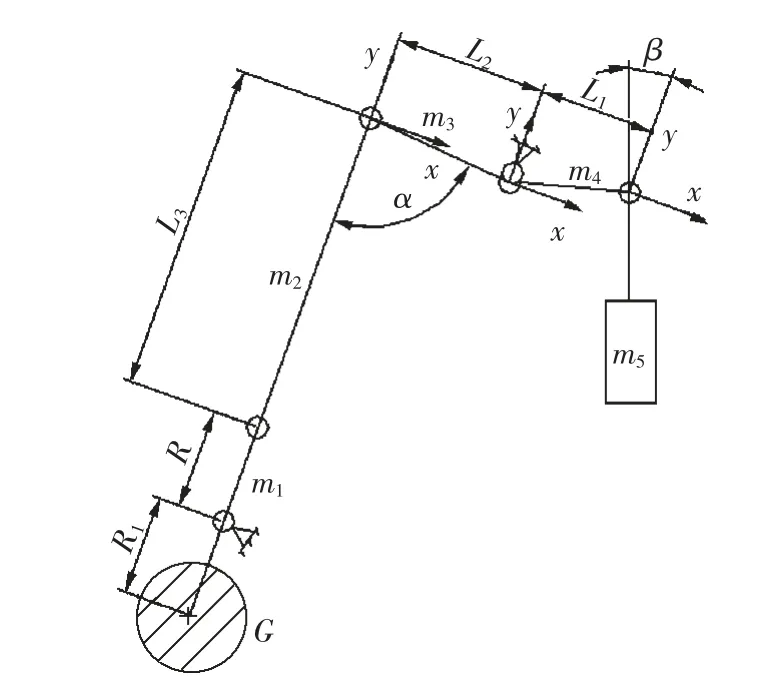
圖3 改進后計算示意圖
經(jīng)過分析,以曲柄連桿的一個極限位置進行受力分析,并以曲柄連桿所在的直線為y 軸,垂直它的軸線為 x 軸。因為 m1、m2、m3受力情況基本一樣,慣性力也基本一致,統(tǒng)一稱它們?yōu)榍B桿部分。同理m4、m5也統(tǒng)一稱為滑塊部分。由圖可知,該機構(gòu)大部分質(zhì)量在y 軸上,x 軸上的質(zhì)量很小且可平衡一部分,因此x 軸質(zhì)量可以忽略。現(xiàn)以y 軸質(zhì)量做動平衡分析如下。
滑塊部分 y 軸質(zhì)量:mY1=(m4+m5)cosβ
曲柄連桿部分 y 軸質(zhì)量:mY2=(m1+m2+m3)cosα
由此計算需要配重的質(zhì)量G:
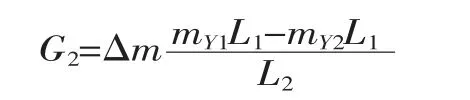
式中:G——配重質(zhì)量;
m1——曲柄質(zhì)量;
m2——連桿質(zhì)量;
m3——擺叉左部分質(zhì)量;
m4——擺叉右部分質(zhì)量;
m5——滑塊質(zhì)量;
L1——擺叉右側(cè)長度;
L2——擺叉左側(cè)長度;
α——連桿與擺叉中心角度;
β——連桿與滑塊中心角度。
2 實施方式
本文所述配重的連接方式舉例說明如下。如圖4 所示,配重 1 通過螺釘 4 和連接板 5 與曲柄 2 連接,通過鍵3 與曲柄實現(xiàn)角度控制,即保證所有配重質(zhì)量均在曲柄偏心的相反側(cè)。這只是實現(xiàn)該方案的一種辦法,經(jīng)過實踐還有其他連接方法,只要保證所有配重質(zhì)量均在曲柄偏心的相反側(cè)就可以,在此不一一列舉。
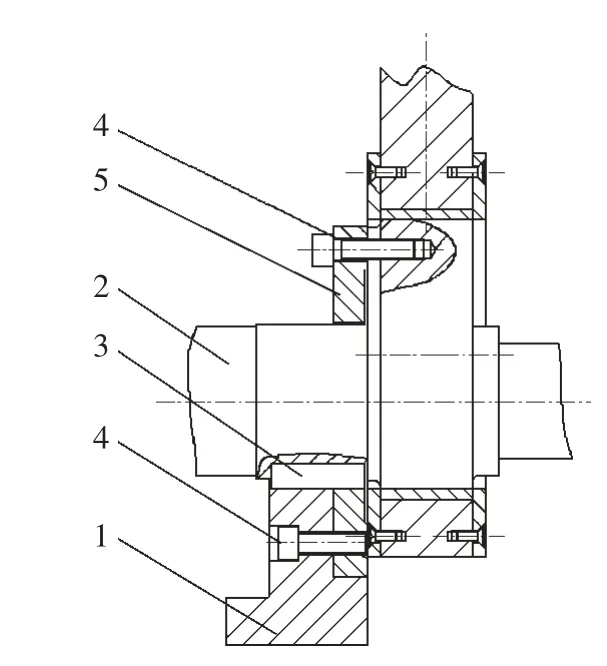
圖4 改進后配重和曲柄的連接方式示意圖
通過以上質(zhì)量平衡方法,公司生產(chǎn)的JK91-32型沖槽機最高生產(chǎn)率達到300min-1,依然非常平穩(wěn),且噪聲很低,改善了機床各個零部件的工作性能,得到了用戶好評,具有很高的推廣價值。
[1]何德譽.曲柄壓力機[M].北京:機械工業(yè)出版社,1989.
[2]鍛壓技術(shù)手冊編委會.鍛壓技術(shù)手冊[M].北京:國防工業(yè)出版社,1988.
[3]機械傳動及曲柄壓力機編寫組,編.機械傳動及曲柄壓力機.北京:人民教育出版社,1978.
[4]陳立周,等.機械優(yōu)化設(shè)計[M].上海:上海科技出版社,1987.
[5]姜 琪,主編.機械運動方案及機構(gòu)設(shè)計[M].北京:高等教育出版社,1991.
[6]成大先.機械設(shè)計手冊(第三版).北京:化學(xué)工業(yè)出版社,1997.
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年10期)2022-11-10 09:37:42
中學(xué)生數(shù)理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(shè)(2018年6期)2018-04-22 03:16:54
產(chǎn)品可靠性報告(2017年7期)2017-09-05 09:49:12
中學(xué)生數(shù)理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54
