基于Simulink的液壓油缸爬行仿真
2014-07-01 09:32:28葛旭峰湯炳新
鍛壓裝備與制造技術 2014年5期
葛旭峰,湯炳新
(河海大學常州校區 機電學院,江蘇 常州213022)
1 引言
液壓缸是實現直線往復運動的執行元件,它能將液體的液壓能轉換為機械能[1]。在液壓系統中,當液壓缸處于低速運動狀態時,經常會出現滯滑現象(stick-slip),這是一種短暫“卡阻”和“失壓”前沖現象[2],這種現象十分普遍且復雜,關于液壓爬行的機理已有很多研究,液壓缸爬行的原因有很多,大致可以歸納為機械原因、液壓原因、潤滑原因、混進空氣等[3]。
2 理論分析
2.1 動力學分析
為了方便研究,我們把外部影響因素、液壓油與活塞間的復雜受力關系簡化為一個彈簧阻尼系統,這樣就可以把液壓缸簡化為如圖1 所示的模型,在這個模型里,我們認為液壓油是不可壓縮的[4]。那么,活塞所受的動力學方程可表示為:

式中:x 為液壓油的位移;y 為活塞的位移;k 為液壓油的彈性剛度;c 為阻尼系數;f 為活塞所受的摩擦力。對于此模型,我們做如下分析,當液壓油以較低的恒速運動時,由于摩擦力f 的存在,活塞不會運動而彈簧被壓縮。當彈簧的推力大于活塞所受最大靜摩擦力時,活塞開始運動,由于動摩擦力較最大靜摩擦力小,所以活塞會做加速運動。當活塞運動一定距離后,彈簧的壓縮量減小,從而使活塞所受推力減小,當活塞受到的推力等于動摩擦力時,活塞就會停止運動。這個過程在液壓油的速度低于臨界速度時會周期存在。
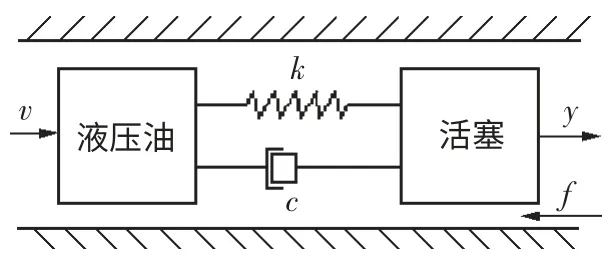
圖1 液壓缸爬行模型
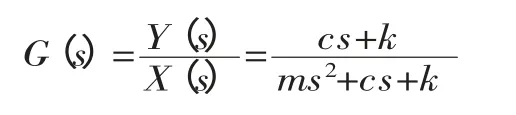
這里,我們把f 看成是擾動,那么可以對(1)式進行拉氏變換得到傳遞函數為:
系統的結構圖如圖2 所示。
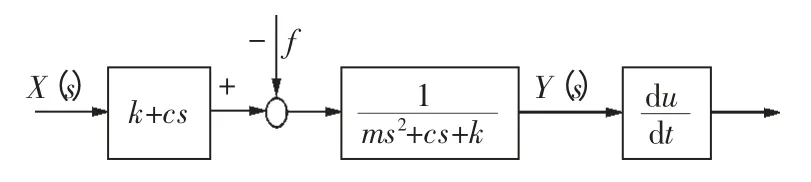
圖2 系統的結構框圖
2.2 摩擦力
摩擦是在兩個接觸面間產生的切向作用力,它普遍存在于各種系統中,許多學者都在研究摩擦特性,無數試驗研究已逐漸揭示了摩擦豐富的行為特性[5],摩擦特性可分為靜態摩擦特性、動態摩擦特性。靜態摩擦特性包括庫倫摩擦(Coulomb friction)、黏性摩擦(Viscous friction)、靜摩擦力(Static force)、Stribeck 摩擦(Stribeck friction);動態摩擦特性包括預滑動位移(Presliding displacement)、可變的靜摩擦力(Varying static force)、摩擦滯后(Frictional lag)。
本文選用如圖3 所示的摩擦模型[6],該摩擦模型包括庫倫摩擦特性、黏性摩擦特性、靜摩擦特性,其數學表達式可以表示為:
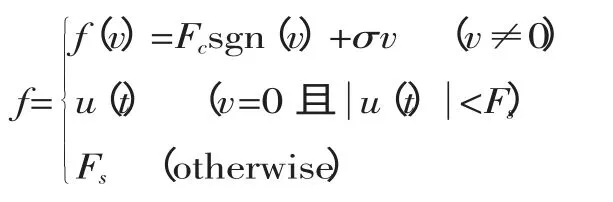
式中,f 為摩擦力;Fc為庫倫摩擦力;u(t)為外力;Fs為最大靜摩擦力;σ 為黏性摩擦系數。
3 模擬仿真
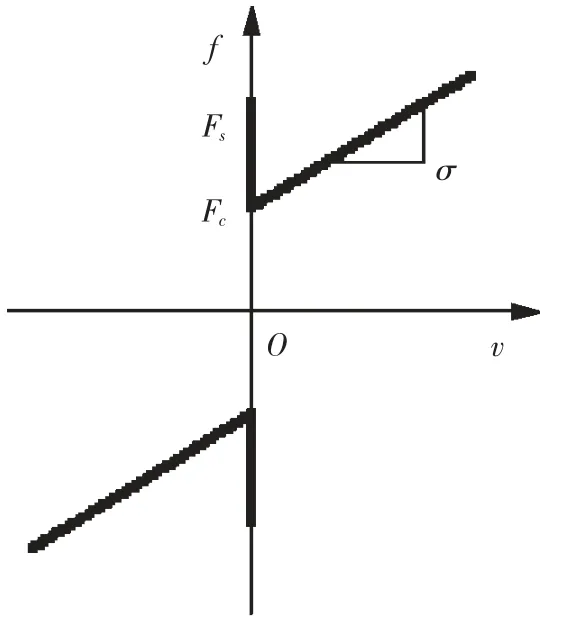
圖3 摩擦模型
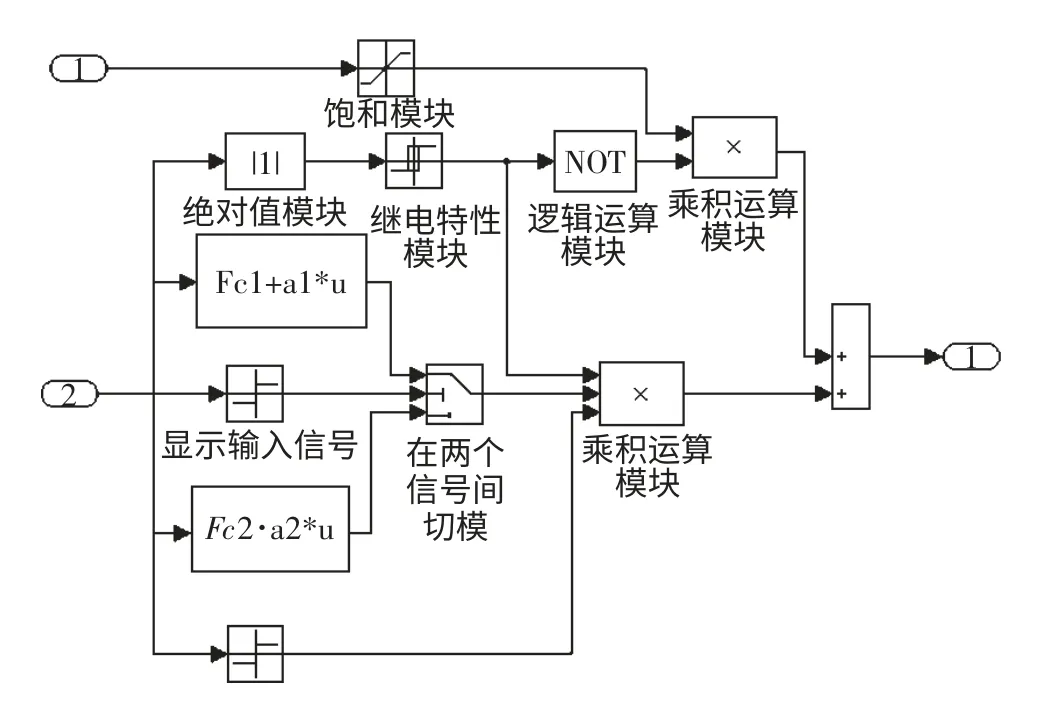
圖4 摩擦的Simulink 模型
考慮到實際中,圖3 的兩條曲線并不一定對稱,也即第一象限的Fs、Fc、σ 與第三象限的Fs1、Fc1、σ1不相等,則對應的Simulink 摩擦模型為圖4,模型中用Fcn模塊定義滑動時的摩擦力,用Sign 模塊獲得輸入速度的方向,由于是數值仿真,所以在該模型中定義了一個零速區間,當時,強制認為速度為0,這樣做的好處是避免了零速檢測問題以及滯滑摩擦狀態方程間的切換問題,DV 的值應該根據實際情況而選定,這里我們認為是1×10-5。此模型與文獻6不同之處在于這里的模型加入了switch 模塊來實現雙向摩擦力參數的設定,從而更符合真實情況。由文獻6 可知,對于u-f=ma 的動力學方程,運用此摩擦模型的滯滑運動的仿真結果和理論值是幾乎相等的。則將此摩擦模型應用到液壓系統中,并在MATLAB 中進行仿真。其各參數如表1 所示,單位均為國際標準單位。

表1 參數表
仿真時,假定活塞推拉雙向的摩擦參數相等,動摩擦系數為0.07,最大靜摩擦系數為0.1。從圖5 可以看出,活塞有明顯的振顫現象。圖6 是活塞的受力和速度曲線圖,其中實線是由摩擦模型給出的摩擦力,雙劃線是活塞受除摩擦力外的合力,為了更好地顯示下方的速度曲線,速度數值已經過處理。
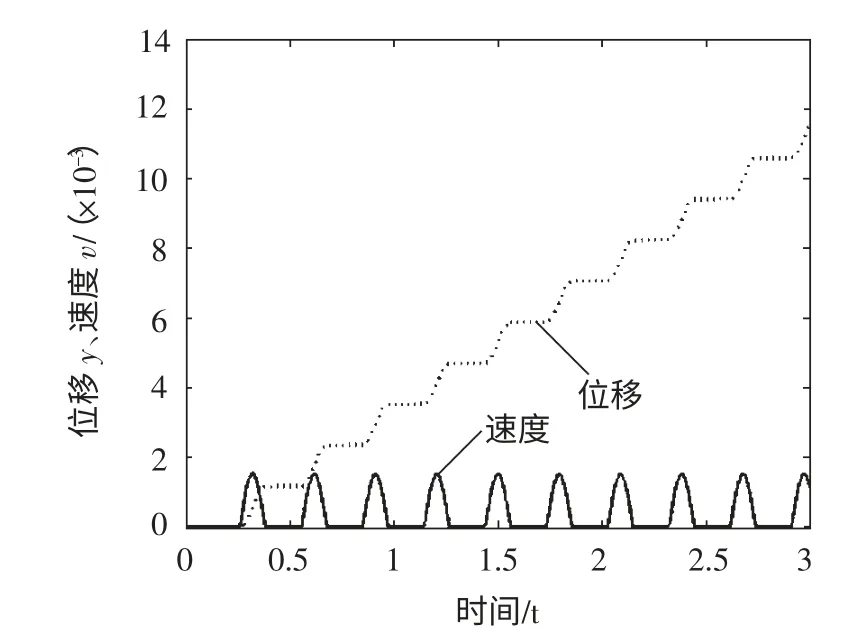
圖5 活塞運動曲線
4 PID控制
由前一部分可知,通過Simulink 模型,已經可以準確描述低速下液壓油缸的爬行現象,這里我們通過傳統控制算法——PID 算法對其進行控制,以期使速度曲線能平穩接近輸入信號0.004。
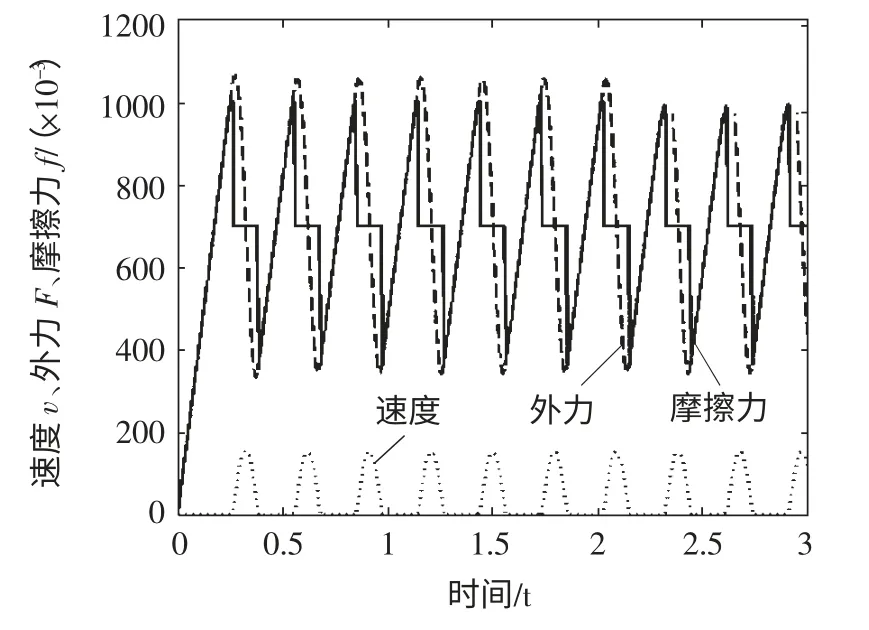
圖6 活塞受力曲線
PID(比例、積分、微分)控制是發展較早、理論成熟、運用廣泛的一種控制策略,其表達式的一般形式為[7]:

連續PID控制器的傳遞函數模型為:
三參數的作用為:比例參數KP的作用是加快系統的響應速度,提高系統的調節精度;積分作用參數的最主要作用是消除系統的穩態誤差;微分作用參數的作用是改善系統的動態性能,其主要作用是在響應過程中抑制偏差向任何方向的變化,對偏差變化進行提前預報。

圖7 系統框圖
取KP、KI、KD分別為4、0.1、0.1。系統框圖如圖7所示,控制效果如圖8 所示。
由控制效果圖可知,通過簡單的PID控制,可以使系統的輸出速度穩定在0.035 左右,基本實現了對輸入速度的復現。
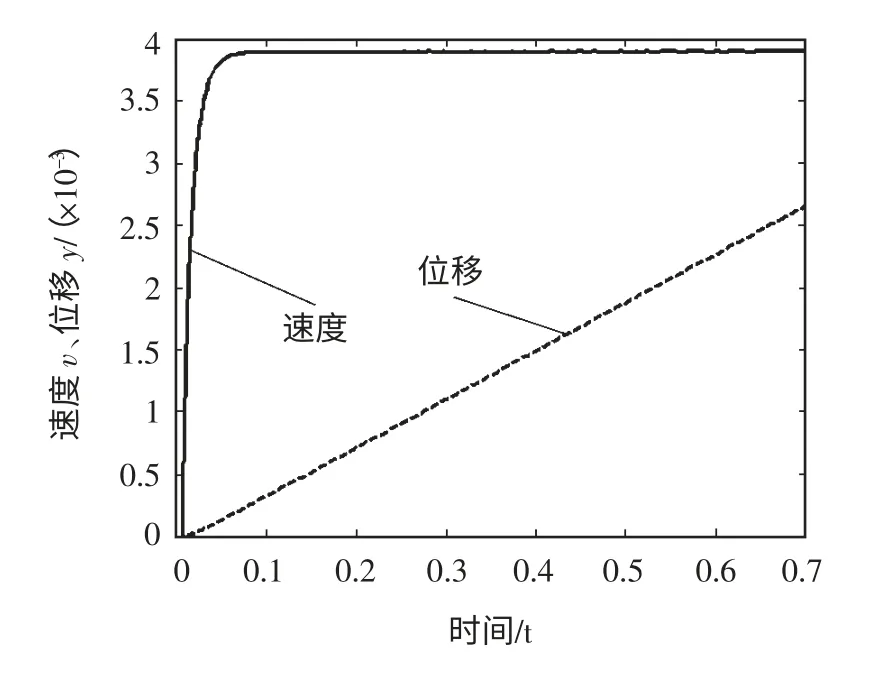
圖8 PID控制效果圖
5 結論
本文建立了液壓缸滯滑現象的數學模型,該模型簡單,原理清晰。在Simulink 中搭建了仿真模型,通過引入摩擦模型,成功模擬了液壓缸低速爬行現象。由式(1)可知,在不改變內因的條件下,液壓油的速度越低,活塞的質量越大,就越容易引起爬行現象。同時本文為液壓缸低速運動平穩性控制提供了參考。
[1]陸 紅,周 琦.面向超低速“蠕進”液壓缸的控制回路及設計.鍛壓裝備與制造技術,2004,39(5):49-51.
[2]陸 紅.滑動爬行界面間隙腔簇的滯沖速效應探討.鍛壓裝備與制造技術,2010,45(5):107-108.
[3]王林鴻,郭俊杰,吳 波,等.液壓缸低速爬行原因新探[J].液壓與氣動,2006,9(1):14-18.
[4]金 哲,柯 堅,于蘭英,等.液壓缸低速爬行動力學研究[J].機械設計,2006,23(2):39-42.
[5]劉麗蘭,劉宏昭,吳子英,等.機械系統中摩擦模型的研究進展[J].力學進展,2008,38(2):201-213.
[6]王 毅,何 朕,蘇寶庫.摩擦模型的Simulink仿真[J].電機與控制學報,2004,8(1):60-62.
[7]張德豐.MATLAB/Simulink 建模與仿真實例精講[M].北京:機械工業出版社,2010.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19