拖航狀態的自升式平臺樁腿強度分析
2014-07-18 11:51:08孫雪榮
船舶 2014年1期
孫雪榮
(中國船舶及海洋工程研究設計院 上海200011)
拖航狀態的自升式平臺樁腿強度分析
孫雪榮
(中國船舶及海洋工程研究設計院 上海200011)
為實現拖航狀態的自升式平臺樁腿強度分析,借助DNV系列軟件包,以頻率響應分析的方法對自升式海洋平臺拖航狀態時的橫搖和縱搖固有周期進行了計算;以頻響分析中各相應固有周期的RAO值和相關規范規定的6度單幅橫搖或縱搖值確定拖航的計算波高,并進行拖航狀態時的準靜態結構分析;最后采用API-AISC-WSD軟件來完成樁腿自身結構的屈服和屈曲強度校核,從而為自升式平臺確定恰當的樁腿系固和拖航方案提供依據。
固有周期;結構強度;拖航狀態;有限元法
引 言
自升式海洋平臺主要由平臺主體結構、樁腿、升降結構、鉆井機構等組成。拖航狀態時,整個樁腿收回,平臺重心較高,樁腿的搖擺和風傾力矩較大,拖航穩性較差;樁腿的動彎矩和自身慣性載荷對升樁機構室附近的樁腿自身結構和升樁機構的上導向板結構產生較大的應力。本文希望通過對自升式平臺拖航狀態的樁腿結構強度和分析流程研究,為自升式平臺前期設計方面諸如樁腿結構和升樁結構室等提供依據。
文中借助DNV系列軟件包(GENIE、PATRANPRE、HYDROD、WADAM、SESAM MANAGER等),首先以頻率響應分析的方法對自升式海洋平臺拖航狀態時的橫搖和縱搖固有周期進行了計算;其次,以頻響分析中各相應固有周期的RAO值和規范[1]規定的6°單幅橫搖或縱搖值,確定了拖航的計算波高;最后進行拖航狀態時的準靜態結構分析,依據API-AISC-WSD軟件進行樁腿自身結構的屈服和屈曲強度校核。
1 計算模型簡介
文中的計算模型基于某平臺處于油田拖航的裝載為計算工況,樁腿結構分析應考慮平臺的運動狀態及其慣性力,油田拖航狀態下僅考慮平臺在橫搖或縱搖固有周期下的6°單幅運動載荷及1.2倍的自身重力載荷[1],該平臺的拖航分析模型和平臺的樁腿結構圖參見圖1和圖2。

圖1 拖航分析和質量分布模型

圖2 樁腿結構示意圖
2 平臺拖航狀態計算
本文并沒有對海上結構物拖航作業中的運動響應計算、波浪載荷計算及準靜態分析等所涉及的理論和原理進行詳細的闡述(這些均可參見相關的理論書籍、船級社規范和DNV系列軟件用戶手冊等),只是針對平臺拖航狀態嘗試和探索使用DNV系列軟件包進行拖航運動固有周期計算、波浪載荷計算及傳遞、拖航準靜態分析以及API-AISC-WSD方法的屈服和屈曲強度校核。
2.1 拖航運動固有周期計算

圖3 拖航濕表面模型示意圖

圖4 拖航狀態的結構有限元模型
平臺拖航運動固有周期的計算借助頻率響應分析的方法完成。頻率響應計算的濕表面模型見圖3,質量分布及結構模型見圖1和圖4,掃描周期為2 s~25 s、浪向0°~345°的所有單位波[3-4],由WADAM進行運動響應直接計算,計算中的臨界阻尼取為0.07;借助后處理程序POSTRESP得到平臺拖航的橫搖頻率響應曲線和縱搖頻率響應曲線,見圖5和圖6。
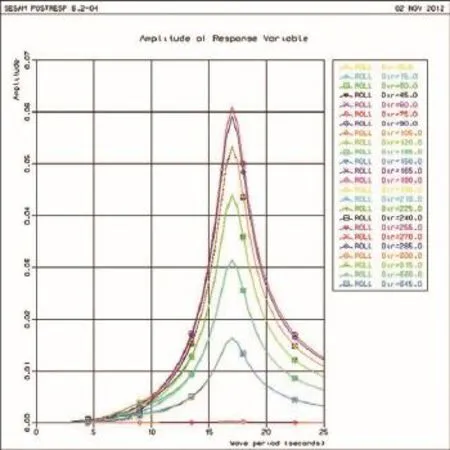
圖5 平臺橫搖響應曲線
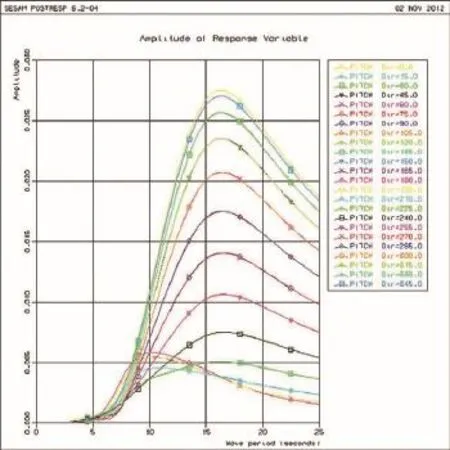
圖6 平臺縱搖響應曲線
鑒于自升式平臺主體結構為特殊的三角形型式,在平臺縱搖響應曲線中可看到隨不同浪向角的變化,平臺自身縱搖固有周期會改變;本文在此并不進行展開,只是根據圖5和圖6確定常規橫搖運動和縱搖運動的環境載荷參數,見表1。
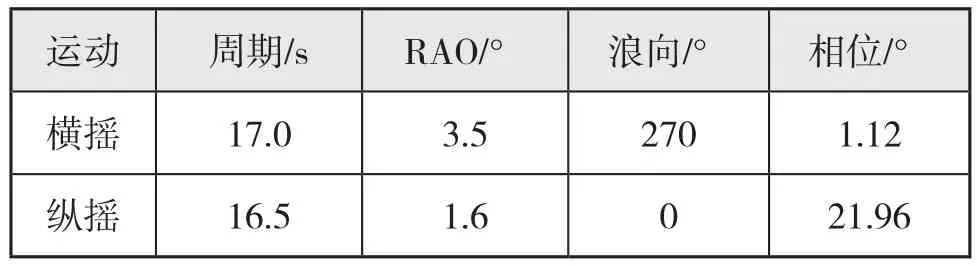
表1 拖航環境載荷參數的確定
表1中的浪向定義:由尾部指向平臺首部為浪向0°,其余浪向依次逆時針旋轉。
2.2 拖航運動載荷計算
確定平臺拖航的固有周期和RAO后即可確定規范中6°單幅運動固有周期對應的波高、橫搖和縱搖固有周期下6°單幅運動的波高分別為1.7 m和3.8 m,樁靴和主船體及升樁機構室均做簡化處理,有限元分析的結構和質量分布模型見圖4。
為避免剛體位移,有限元模型選取三個不共線的節點,施加不同的線位移約束[2],如圖7所示。波浪載荷計算和傳遞依舊通過HRDROD、WADAM進行。
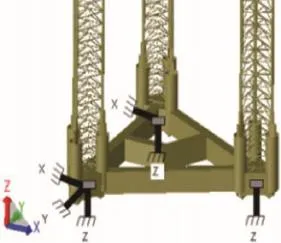
圖7 邊界條件示意圖
在拖航運動載荷中,風、浪、流綜合作用的結果是使平臺產生固有周期下的6°單幅運動,所以拖航計算載荷中只考慮運動載荷和1.2倍的自身重力載荷[1]。
2.3 拖航準靜態分析
由MANAGER調用波浪載荷計算的結果直接施加于結構分析模型,再調用后處理程序SESTRA進行準靜態分析,分析結果通過FRAMEWORK進行API-AISC-WSD方法屈服強度和屈曲強度校核。
3 計算結果分析
橫搖運動和縱搖運動下升樁機構室的上導向板附近的樁腿UC值較大,UC值大于0.65的屈曲穩定性分布圖參見圖8;計算結果的最大UC值為0.84。
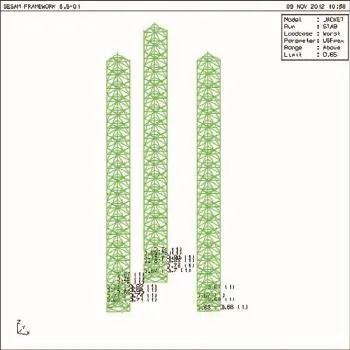
圖8 縱搖運動的樁腿較大UC值分布圖
自升式平臺的拖航狀態分析的關鍵在于:
(1)拖航狀態下模型的自身平衡,模擬的平臺質量和排水量之間的差異盡量小;
(2)確定拖航狀態下的橫搖和縱搖固有周期;
(3)計算和確定6°單幅運動固有周期下的拖航計算波高,臨界阻尼的確定直接決定著運動響應的峰值及拖航計算波高,一般取0.03~0.07[5],本文在此直接取0.07;
(4)準靜態分析中的結構模型邊界條件要合理,平臺模型重力和浮力的平衡控制決定了邊界條件處支反力的大小以及計算結果的相對精確性。
4 結 論
本文針對自升式平臺在拖航狀態下的樁腿強度進行了分析研究,沒有拓展三角型平臺主體形式所決定的不同浪向角下不同的縱搖周期,也并沒有對升樁機構室的上導向板結構在拖航狀態下的應力情況進一步校核,只是嘗試和探索了使用DNV系列軟件包進行固有周期計算、水動力載荷計算以及傳遞、結構準靜態分析、樁腿結構的API-AISCWSD方法的校核,為拖航狀態方案提供初始的依據,也為后續的局部構件的強度校核提供載荷數據。
本文在撰寫過程中得到了我院海工部張海彬博士的指導和建議,在此表示衷心感謝!
[1] ABS. Rules for Conditions of Classification-Offshore Units and Structures [S]. 2012.
[2] DNV. Recommended Practice DNV-RP-C104 Self-Elevating Units[S]. 2011.
[3] 李輝,任慧龍,陳北燕,等. 深水半潛式平臺波浪載荷計算方法研究[J].華中科技大學學報(自然科學版),2009(3):122-125.
[4] 張海彬,沈志平,李小平.深水半潛式鉆井平臺波浪載荷預報與結構強度評估 [J].船舶, 2007(2):33-38.
[5] SNAME. Guidelines for Site Specific Assessment of Mobile Jack-Up Units, Society of Naval Architects and Marine Engineers[M]. Technical & Research Bulletin 5-5A “Site Specific Assessment of Jack-Up Units” (1994/2002).
Structural strength analysis of self-elevating drilling unit leg in towing condition
SUN Xue-rong
(Marine Design & Research Institute of China, Shanghai 200011, China)
This paper calculates the roll and pitch natural period of the self-elevating drilling unit legs in towing condition for the structural strength analysis of legs by frequency response analysis method via DNV software package. It also calculates the wave height by the RAO value of the strength analysis of the unit legs and the 6°single amplitude rolling and pitching value in the relevant regulations, and carries out the quasi-static structural analysis in the towing condition. Finally, it checks the yield and buckling structural strength of the unit legs by API-AISCWSD, which provides the basis for the appropriate leg securing and towing scheme.
natural period, structural strength, towing condition, finite element method
U662.1
A
1001-9855(2014)01-0049-04
2013-01-20;
2013-03-01
孫雪榮(1979-),女,高級工程師,主要從事船舶結構強度分析及振動噪聲研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
