大型半潛船壓載水系統設計
2014-07-18 11:51:08李志壘
船舶 2014年1期
關鍵詞:系統
李志壘
(海洋石油工程股份有限公司 天津300461)
大型半潛船壓載水系統設計
李志壘
(海洋石油工程股份有限公司 天津300461)
為安全可靠地實現半潛功能,根據某半潛式自航工程船壓載艙眾多的特點,采用空氣壓載系統與泵壓載系統相結合進行設計。試航結果顯示:壓載水系統的設計能夠安全實現該半潛式自航工程船海上半潛作業功能,達到技術規格書中的有關要求。
排壓載;空氣壓載系統;泵壓載系統;半潛船
引 言
隨著世界經濟發展,能源需求越來越大。由于陸上原油儲量日益枯竭,人們將目光轉向寬闊無垠的海洋。海洋里不但含有豐富的礦產和資源,而且具有極大的科研價值。根據美國2008年7月發表的地理勘察報告,僅在北極地區已經探明的碳氫化合物儲量就富含超過900億桶石油、2 000萬億立方英尺(約56.63萬億立方米)天然氣以及400億桶液化天然氣。各種用途的海洋工程船及石油開采平臺成為人們開發海洋資源的重要工具[1]。
作為海洋工程船,大型半潛式自航工程船具有海洋石油和天然氣勘探、開采工程裝備等海上運輸和安裝功能獲得越來越多的應用。與傳統的運輸船舶相比,半潛船壓載水系統更為復雜,必須對其壓載系統進行詳細設計和計算分析,以確保該工程船半潛作業時的船舶穩性。本文以5萬噸半潛船“海洋石油278”為例,對其壓載水系統的設計理念和特點進行詳細闡述。
1 概 述
1.1 設計目的
5萬噸“海洋石油278”半潛船的設計用途為可采用浮托法(floatover)運輸和安裝樁腿結構的上部模塊功能[2]。同時,該船具備下潛至最大設計吃水的能力,通過該方式裝載/卸載及運輸類似半潛鉆井平臺和其他海洋結構物浮體貨物。當船艉朝向碼頭系泊時,能夠通過滑道裝載/卸載SPAR等各種貨物。經簡易改裝后,可以裝載和運輸更龐大的貨物。
1.2 壓載系統原理和組成
全船共設置86個壓載艙,約可容納壓載水100 000 t,通過2套壓載系統迅速實現全船的壓載、排載。其中位于主船體的多個壓載艙采用壓縮空氣壓、排載;其余的壓載艙采用傳統的泵壓載系統。壓載艙布置圖如圖1所示。
泵壓載系統分成艉部泵壓載系統和首部泵壓載系統2個獨立的系統。所有主甲板以上的壓載艙接入泵壓載系統。其他壓載艙同空氣壓載/排載系統相連。在排載工況,壓縮空氣通過壓縮空氣管進入壓載艙,利用壓縮空氣的壓力將水排出壓載艙;在壓載工況,利用空壓機抽出空氣管內的空氣以加快壓載速度。
2 空氣壓載系統
2.1 工作原理
空氣壓載系統工作的原理:壓載時,關閉壓縮空氣管的遙控蝶閥并打開通大氣遙控蝶閥,再打開壓載艙的通海管上的遙控蝶閥,通過海水的壓力向壓載艙自然灌水,并通過壓載空氣管透氣,在壓載工況需要的情況下,為加快壓載速度,通過控制壓載空壓機上的遙控蝶閥和壓縮空氣管上的遙控蝶閥,并打開壓載艙的通海蝶閥,利用空壓機抽吸壓載艙內的空氣,壓載艙內的負壓,使海水加速進入壓載艙,加快下潛速度。
排載時,打開壓載艙的通海管上的遙控蝶閥,啟動壓載空壓機,并打開壓縮空氣管上的遙控蝶閥,將壓縮空氣注入壓載艙內,通過通海水管排出壓載艙的海水。
2.2 壓載計算
壓載過程包括船舶的下潛和上浮。下潛過程的初始階段與浮托法類似,利用壓載泵和重力進水,使船舶吃水在規定時間內從初始的吃水增加到設計吃水。下潛過程主要利用重力進水,空壓機僅用來抽出空氣管內的空氣以加快壓載速度。
上浮過程即排壓載過程,船舶在規定時間內,吃水從初始吃水水位減少到設計水位。對于半潛船,最重要的考核指標為排載時間,即船舶能否在規定時間內從壓載吃水上浮到設計吃水。
為了確定空氣壓縮機在不同吃水下的實際排水能力,假設半潛式工程船整個上浮過程可以分解為四個步驟。在每一步驟中,部分壓載艙中的水會被全部或部分排出。在排水過程中,為了時刻保持船體穩定和縱傾,必須舍棄壓載水系統的部分排載能力。根據壓載艙在全船上所處的位置,劃分為不同區域[3],如圖2所示。
通過對每個區域的艙室管路平均排載量進行計算。即在一定壓力損失下,管路中能排出的壓載水量。從而計算出每一步驟中壓縮空氣的需求量。計算過程中,需考慮空氣和水管中平均壓力損失。由于半潛式工程船在上浮過程中吃水是隨時變化的,導致靜水壓力隨著壓載艙及壓載艙內水位升高而迅速變化。為了簡化計算,通過壓載艙的重心高度來確定其受到的靜水壓力。
2.3 計算原理
空壓機排量計算式[4]為:

式中:Q2為實際排量,m3/h;
Q1為空壓機額定排量,m3/h;

圖2 壓載艙區域劃分圖
p1為大氣壓力,Pa;
p2=p1+壓載艙內水所受海水壓力+
管路壓力損失。
直水管壓力損失計算式為:

式中:Δpf為直管摩擦阻力損失,Pa ;
λ為管子摩擦阻力系數;
l為管段長度,m;
di為管子內徑,m;
ρ為流體密度,kg/m3。
附件局部阻力計算式為:

式中:Δpr為局部阻力,Pa;
ξ為局部阻力系數;
ρ為流體密度,kg/m3。
主甲板以上壓載艙重力泄放流量計算式為:

式中:Qw為水流量,m3/h;
ξ為局部阻力系數;
A為管路橫截面積,m2;
ρ為流體密度,kg/m3;
g為重力加速度,9.81 m/s2;
h為艙柜水面和海平面液位差,m。
2.4 管路壓力損失
因為實際管路中壓力損失和附件阻力隨流體流速變化而變化,管路中流體流速會隨外部條件的變化而改變。因此,通過控制壓縮空氣排氣壓力、水靜壓和管路損失來優化流量,從而減少管路壓力損失。
2.5 計算結果
在排壓載上浮過程中,每組壓載艙所需的壓縮空氣量并不相同,所以需要綜合考慮每組壓載艙的排放能力,求出每組壓載艙的平均值;再用總的壓載水排出量除以該平均值,求得該船上浮所用時間。
根據該大型半潛式自航工程船上浮初始狀態,壓載艙內壓載水總量約為100 000 t,其耗時計算結果如下:
上浮步驟1時間T1=45 min;
上浮步驟2時間T2=94 min;
上浮步驟3時間T3=32 min;
上浮步驟4時間T4=63 min。
從壓載吃水上浮到設計吃水總耗時為:

滿足規格書中的有關要求。
2.6 系統組成
空氣壓載水系統由4臺空壓機橇塊、4組壓載空氣總管、空氣管遙控蝶閥、70個壓載艙、海水管遙控蝶閥和相關的管線組成。每個壓載艙布置一根獨立的壓縮空氣管,從空氣總管接至每個壓載艙,并配有一個遙控蝶閥,用于控制空氣向壓載艙內注壓縮空氣。每個壓載艙設置獨立的進水、排水用的通海水管,每根海水管設置兩只串聯的電液式單作用遙控蝶閥。
3 泵壓載系統
由于空氣壓載系統微調性較差,本船還設置了泵壓載系統。全船共配備4臺壓載水泵,分別布置在船艏的泵艙和艉部的主推進器艙。
艏部泵壓載系統由2套電動離心泵組成。艏壓載泵布置在艏泵艙,對主甲板以上的壓載艙進行壓排載操作。
艉部泵壓載系統由2套電動離心泵組成。艉壓載泵布置在推進電機艙,對艉浮箱和WB01UCP,WB01UCS進行壓排載操作。
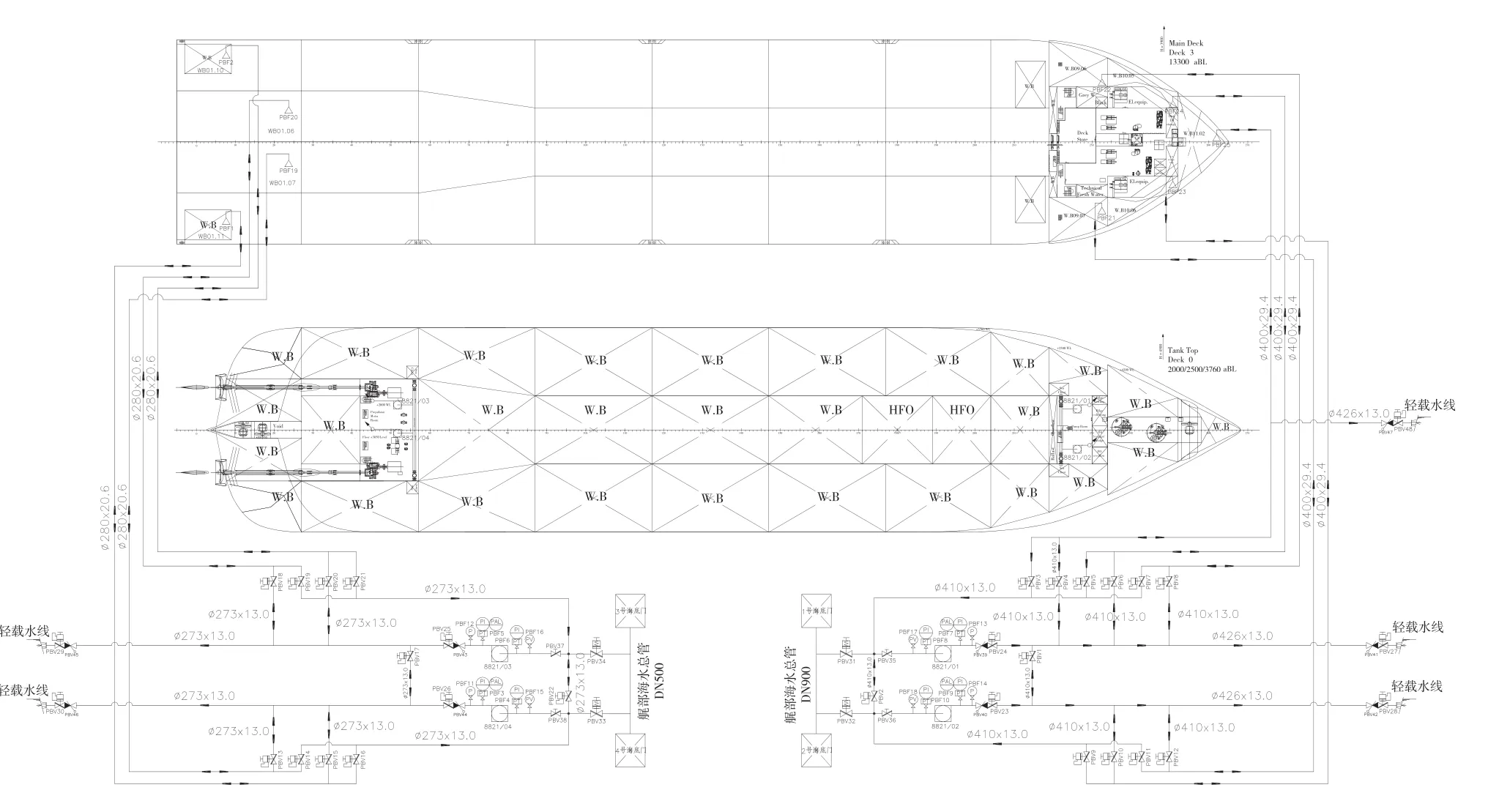
圖3 泵壓載系統圖
泵壓載水系統由海底總管、4臺壓載水泵、12個壓載艙和4個艉浮箱、壓載艙透氣管、海水管上的遙控蝶閥和相關的無縫熱鍍鋅鋼管組成,通過液位遙測系統實時監視艙內液位,通過遙控控制泵的啟停和遙控蝶閥的開關,實現壓載艙的壓載和排載。
壓載時,開啟進水管上的所有遙控蝶閥、啟動海水泵、從海底總管抽吸海水,由海水泵提供壓頭向壓載艙內注海水;壓載艙內的空氣由壓載艙透氣管排向大氣,通過液位遙測系統,當液位達到指定位置時,停用壓載泵、關閉遙控蝶閥,壓載操作完成。排載時,調整相關的遙控蝶閥、啟動壓載泵,通過壓載泵抽吸壓載艙內的海水;通過液位遙測裝置檢測液位降至目標要求時,停用壓載泵并關閉遙控蝶閥,完成排載。
4 結 論
為實現采用浮托法運輸和安裝樁腿結構的上部模塊功能,5萬噸“海洋石油278”半潛船壓載系統采用空氣壓載/排載系統與傳統泵壓載系統相結合,從而確保該船安全地實現各種半潛作業工況。
[1] 陳雷,李含萍.超大型起重船壓載調載系統研究設計[J].船舶,2010 (1):34-38.
[2] 李曉蘭.半潛式自航工程船“海洋石油278”開工建造[J].海洋石油,2010(3):52.
[3] 周卓亮,蔡潔. 50 000 t半潛船壓縮空氣壓載系統設計研究[J].船舶,2013(5):57-62.
[4] 中國船舶工業集團公司.船舶設計實用手冊(輪機分冊)[M].北京:國防工業出版社,1999.
Ballast water system for a great semi-submersible vessel
LI Zhi-lei
(Offshore Oil Engineering Co., Ltd., Tianjin 300461, China)
To realize the semi-submersible function safely and reliably, the ballast system of a certain semisubmersible self-propelled heavy lift vessel is designed by means of combining the air and pump ballast systems according to the characteristics of its numerous ballast tanks. The trail results show that the design of the water ballast system is able to realize the semi-submersible working function for a semi-submersible self-propelled heavy lift vessel at sea, which satisfies the requirements of the technical specification.
deballast; air ballast system; pump ballast system; semi-submersible vessel
U664.8
A
1001-9855(2014)01-0053-05
2013-03-29;
2013-07-07
李志壘(1976-),男,碩士,工程師,研究方向:船舶可行性研究和建造技術管理。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
