基于狀態參數可觀測度分析的艦機傳遞對準自適應濾波方法
2014-07-19 10:13:39王丹丹穆榮軍
中國慣性技術學報 2014年1期
關鍵詞:變形
梁 浩,王丹丹,穆榮軍
(1.哈爾濱工業大學 航天學院,哈爾濱 150001;2.北京宇航系統工程研究所,北京 100076)
基于狀態參數可觀測度分析的艦機傳遞對準自適應濾波方法
梁 浩1,王丹丹2,穆榮軍1
(1.哈爾濱工業大學 航天學院,哈爾濱 150001;2.北京宇航系統工程研究所,北京 100076)
針對艦機慣導傳遞對準過程中艦船機動受限、系統可觀測性差等特點,提出了基于狀態參數可觀測度分析的自適應濾波方法。通過系統狀態參數可觀測性分析,量化各狀態分量可觀測程度,進而根據可觀測度大小分組構造自適應調節因子,并采用濾波增益衰減法對觀測度低的分量通道進行有效處理,以此來提高傳遞對準濾波算法的適應性和濾波估計精度。艦船模擬軌跡下仿真結果表明,基于狀態參數可觀測度分析的自適應濾波方法和常規方法相比,具有較高的精度和較快的收斂速度,對準精度由3′提高到2′,濾波估計收斂時間由15 min縮短至8 min。
艦載機;傳遞對準;可觀測度分析;濾波增益衰減
艦船體積較大,在航行過程中機動形式受到限制,而當海洋環境比較惡劣時,艦船運動狀態又會受到影響而變化不定[1-3]。因此,復雜多變環境下的艦機慣導傳遞對準成為近年來慣性技術領域研究的重點課題。從動基座傳遞對準研究的歷史來看,為了提高傳遞對準精度、縮短對準時間,研究內容主要集中于各種傳遞匹配方法以及各種卡爾曼濾波模型的探討[4-5]。因此,改進算法、設計合理的濾波器是提高對準效果的重要手段之一。
傳遞對準匹配方法主要分為計算參數匹配法和測量參數匹配法兩類,不論采用何種匹配方法,傳遞對準狀態分量的估計速度和精度主要取決于系統的可觀測性[6]。狀態分量可觀測性的強弱用可觀測度來衡量,目前,可觀測度的分析方法主要有估計誤差協方差陣的征值法和可觀測矩陣的奇異值分解法[7-8],前者要在Kalman濾波運算之后才能進行可觀測度分析,而后者可以在濾波估計的同時進行可觀測度計算。
本文以艦載機慣導傳遞對準為應用背景,建立了地理系下傳遞對準模型,給出了可觀測度的計算方法,提出了一種基于可觀測度分析的傳遞對準自適應調節濾波方法,并采用模擬軌跡對常規方法和改進方法進行了仿真對比和分析,驗證了該方法的有效性和優越性。
1 地理系下傳遞對準模型
1.1 “變形角”定義
艦船甲板在不同種類因素影響下會產生不同形式的變形[9-10],例如在艦體老化、溫度變化、恒定載荷等因素作用下會產生靜態變形,而在海浪沖擊、艦體運動、艦內機械設備運作等因素影響下會產生動態變形,相關研究表明,艦船甲板變形量可達1°~1.5°,此外,艦載機慣導的安裝誤差角也會對慣導對準產生影響。為了便于進行傳遞對準估計精度分析,我們定義甲板“變形角”的概念,即“變形角”為機載慣導安裝誤差角和甲板變形角之和。

甲板動態變形可用由隨機力激發的隨機變量來描述,即可采用白噪聲激勵的二階 Markov過程來模擬甲板的動態變形。設三向變形彼此獨立,則甲板動態變形角模型如下:

1.2 慣導誤差傳播模型
艦機傳遞對準過程中,涉及到主、子兩套慣性導航系統,其誤差傳播特性同單個慣導系統的誤差傳播特性有一定差異。在進行傳遞對準建模處理過程中,需要對慣導系統誤差傳播模型中的相關參量進行重新定義和處理,以區別于研究單個慣導時的情形。
定義艦體主慣導的體坐標系為a系,載機子慣導的體坐標系定義為b系,主慣導的導航坐標系記為n系,子慣導的導航坐標系記為n′系;定義捷聯慣導的計算導航坐標系(數學平臺)同實際導航坐標系對應坐標軸之間的誤差角為姿態失準角,記為。則地理坐標系內,捷聯慣導系統的誤差傳播模型為[11]:
1.3 傳遞對準模型
1.3.1 狀態方程
取狀態向量為:

式中:各分量依次分別為姿態失準角、主子慣導東向及北向速度之差、經緯度之差、子慣導的陀螺常值漂移、加速度計測量零偏和變形角。
系統的狀態方程為:

式中:A為系統狀態轉移矩陣;B為系統過程噪聲驅動矩陣;W為系統過程噪聲向量。A、B中各量由前文給出的慣導系統誤差傳播方程確定。
1.3.2 “速度+姿態”觀測方程
在采用“速度+姿態”匹配模式時,系統的觀測向量為
觀測方程為:

艦載機著艦后在甲板上停放的位置是隨機的,利用著艦后機載慣導關機時刻的導航信息,能夠得到下次值機起飛前艦載機相對艦船基準粗略的姿態關系。
2 艦機傳遞對準自適應濾波方法
2.1 可觀測度分析
為了動態調節卡爾曼濾波器各分量通道增益,利用可觀測性矩陣的奇異值分解法(Singular Value Decomposition,簡稱 SVD法)對系統狀態分量的可觀測性進行定量分析。該方法根據齊次系統模型的系數矩陣構造可觀測性矩陣,然后求取可觀測性矩陣的奇異值,根據其大小判斷狀態分量的可觀測程度。
對于以慣性導航誤差參數建立的狀態方程來說,可以運用分段線性定常系統(Piece-Wise Constant System,簡稱PWCS)來討論系統的可觀測性。為了簡化分析,減少計算量,利用系統的提取可觀測性矩陣(Stripped Observability Matrix,簡稱SOM)來替代完全可觀測性矩陣(Total Observability Matrix,簡稱TOM)。根據系統的狀態方程式(8)和觀測方程式(10),得到系統SOM矩陣為:

式中:n為狀態向量維數,G為系統的可觀測性矩陣。利用奇異值分解法,G可表示為:
式中:Z為系統的觀測值,X0為初始狀態。
當觀測量Z具有常值范數時,待估計的初始狀態X0形成一個橢球,其方程為:


因此,奇異值越大,橢球半徑越小,對初始狀態的估計性能越好,即好的估計值對應大的奇異值。狀態分量的可觀測度定義為:

2.2 狀態參數分組
從可觀測性角度來說,慣導傳遞對準狀態參數可分為觀測性好、觀測性差以及不可觀測三類。在濾波器估計子慣導導航參數誤差的同時,采用SVD方法對系統各狀態分量進行可觀測度計算,從數值上看,以上三類狀態分量可觀測度的數值大小存在較大差異,在構造自適應衰減因子前,首先按可觀測度大小對各狀態分量進行分組。
在進行集合劃分時,要求各子集之間互不相交。經上述篩選處理后,Sx(n)中所有狀態分量按可觀測度數值大小劃分到高-中-低(Sx0、Sx1和Sx2)三個子集中。
2.3 自適應調節濾波算法
為了抑制可觀測度差的分量通道引起的濾波精度下降,根據各狀態分量可觀測度大小權重,在卡爾曼濾波器增益矩陣Kk各行增加一個衰減因子Γj,以減小不良數據通道對整個濾波器的影響,提高濾波算法估計精度,下面給出自適應調節衰減因子的構造方法。
第一步:根據式(18)的分組結果構造各組衰減因子的基準,此基準為各子集中狀態分量可觀測度的極大值,用mμ表示:

式中:m為子集序列號,表示子集Sxm中各狀態分量的可觀測度;
式中:Nm為子集Sxm中狀態分量的個數。
第三步:利用式(19)、式(20)構造衰減因子Γj:

至此,自適應衰減因子構造完畢。卡爾曼濾波器當前時間段的增益矩陣為,將衰減因子Γj乘到Kk的第j行各元素上,即得到衰減后的增益矩陣:
式中:axy為矩陣Kk中的元素。
卡爾曼濾波器的狀態估計方程變為:

3 仿真分析
3.1 仿真條件
以“速度+姿態”匹配模式為例,采用模擬軌跡分別對基于常規卡爾曼濾波和自適應調節濾波的艦機傳遞對準進行仿真對比分析。
在二級海情下,艦船以10 m/s的速度做勻速直線運動,仿真時間15 min;主慣導陀螺常值漂移0.0012 (°)/h(1σ),加表零偏 6×10-6g(1σ);子慣導陀螺常值漂移0.06 (°)/h(1σ),加表零偏3×10-4g(1σ);主、子慣組數據更新周期為0.1 s,傳遞對準濾波周期為0.2 s;艦體坐標系內橫向、法向和縱向桿臂為[2 m 6.7 m 35 m],預設安裝誤差角和甲板靜態變形角之和為1.0°。
3.2 仿真結果
3.2.1 可觀測度分析結果
對艦機傳遞對準濾波估計進行可觀測度分析,根據PWCS理論分段計算式(17)中各狀態分量可觀測度計算方法,模擬軌跡下傳遞對準可觀測度計算結果如表1所示(選取其中一段)。
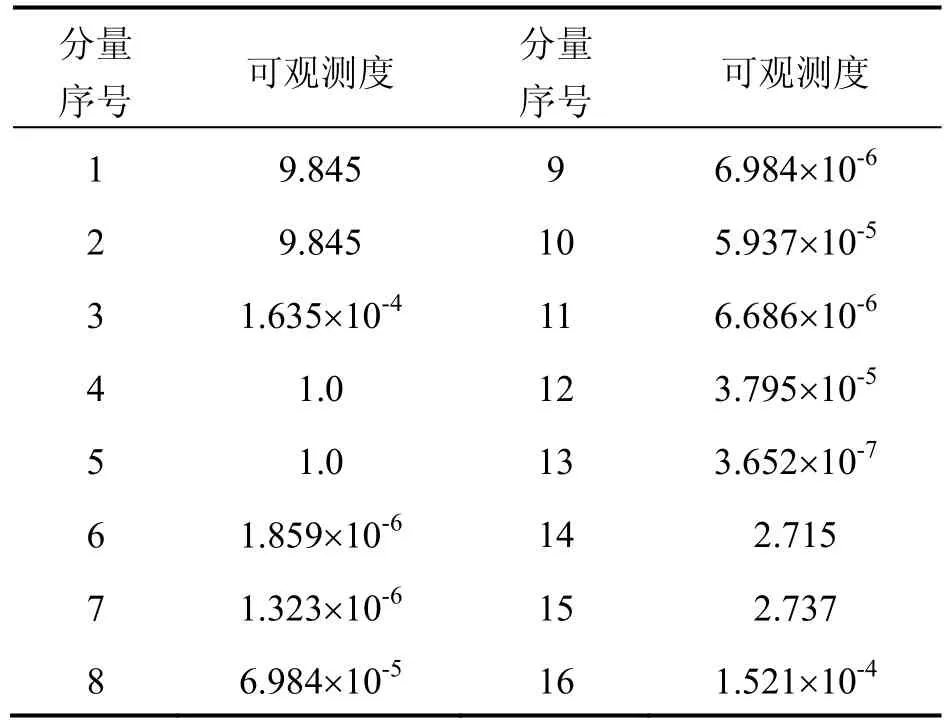
表1 模擬軌跡下狀態參數可觀測度Tab.1 Observable degree of state parameters under simulation trajectory
3.2.2 模擬軌跡下對準結果
采用艦船模擬軌跡,基于常規卡爾曼濾波和自適應調節濾波的慣導傳遞對準結果如圖1和圖2所示。
兩種傳遞對準方法的濾波估計精度對比如表2所示,表中Δφ為姿態失準角估計誤差,為變形角估計誤差。
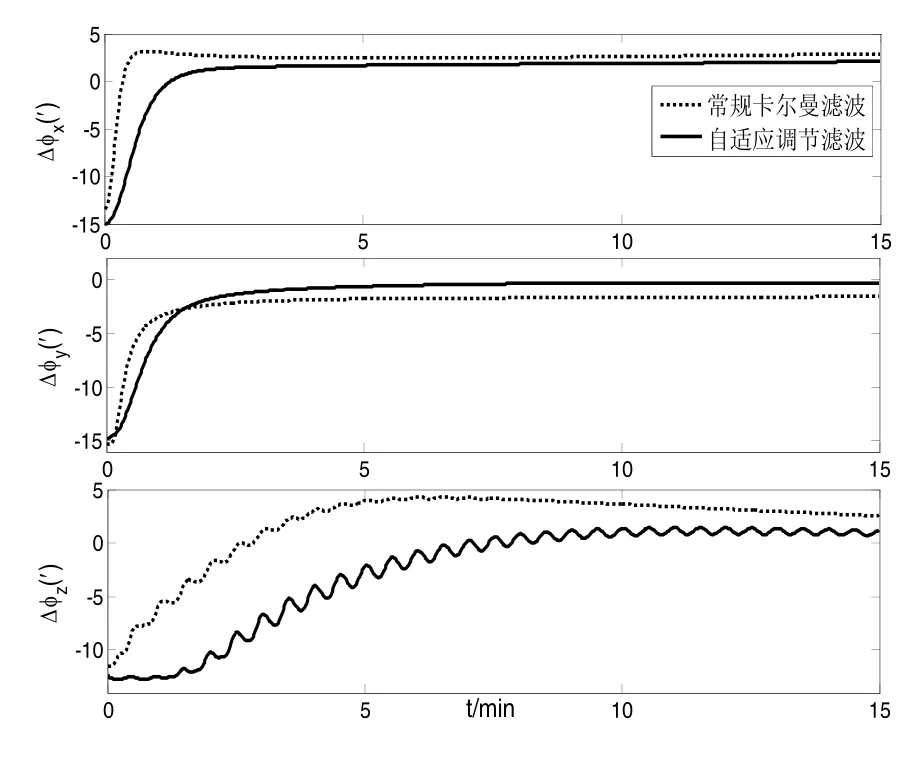
圖1 姿態失準角估計誤差Fig.1 Estimation error of misalignment angles under simulation trajectory
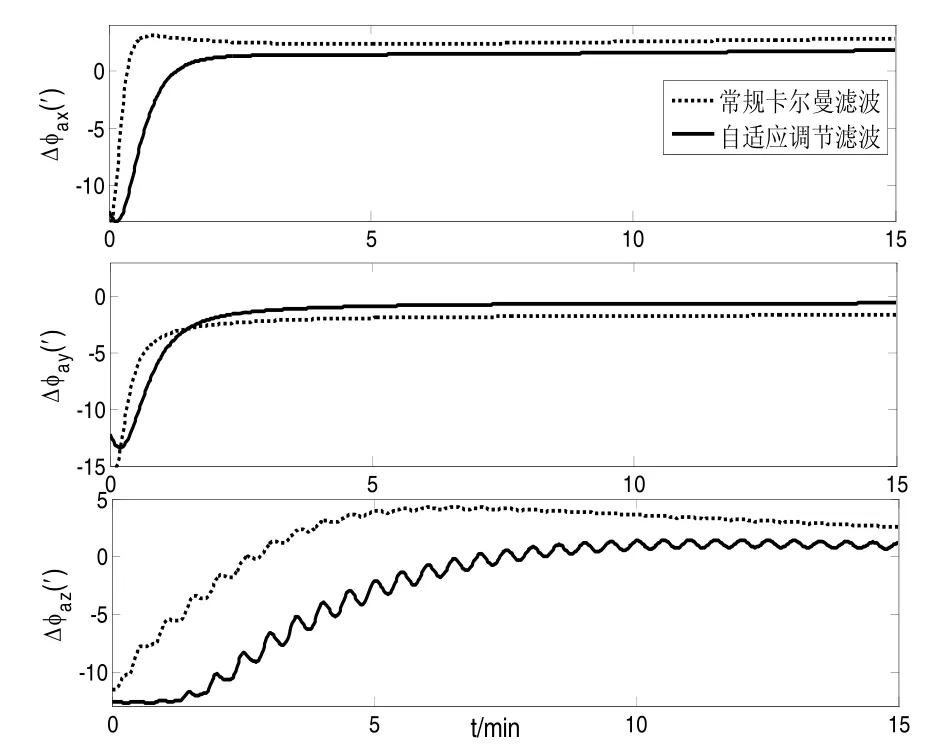
圖2 變形角估計誤差Fig.2 Estimation error of deformation angles under simulation trajectory
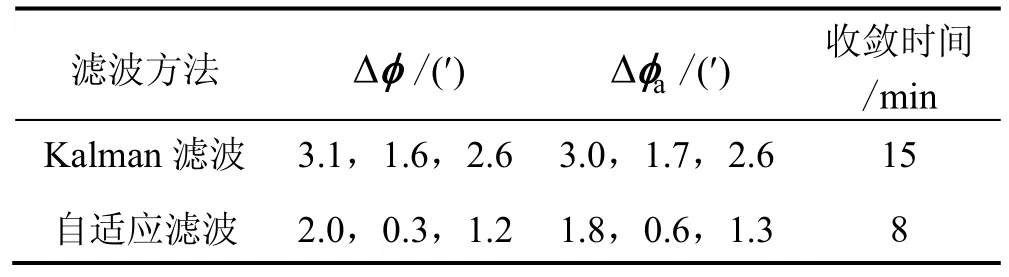
表2 仿真結果對比Tab.2 Comparison of simulation results
3.3 仿真分析
由仿真結果圖1、圖2和表2可以看出,與基于常規卡爾曼濾波的傳遞對準相比,采用自適應調節濾波方法時,能夠減小三向姿態失準角和變形角的估計誤差,對準精度由3′提高到2′,并且傳遞對準時間(濾波估計收斂時間)由15 min縮短至8 min。仿真結果表明自適應調節濾波方法具有較高的精度和較快的收斂速度。
4 結 論
本文建立了地理系下的艦機慣導傳遞對準模型,給出了可觀測度分析方法。針對艦機傳遞對準的特點,對常規卡爾曼濾波方法進行了改造,提出了基于狀態參數可觀測度分析的艦機傳遞對準自適應濾波方法。艦船模擬軌跡下的仿真對比分析表明,本文提出的自適應傳遞對準方法可有效地提高艦機傳遞對準精度,縮短濾波收斂時間,滿足艦載機慣導快速高精度初始對準的需求。
[1]Liu Xin,Wang Bo,Deng Zhihong,et al.C[C]//International Conference on Mechanical Engineering and Materials.Melbourne,Australia,2012:1155-1158.
[2]朱蕾,袁書明,陳晶.艦船平臺上一種改進的傳遞對準方案設計與仿真[J].中國慣性技術學報,2010,18(1):58-62.ZHU Lei,YUAN Shu-ming,CHEN Jing.Improved approach and simulation of shipboard transfer alignment [J].Journal of Chinese Inertial Technology,2010,18(1):58-62.
[3]Yang Dongfang,Wang Shicheng,Li Hongbo,et al.Performance enhancement of large-ship transfer alignment:a moving horizon approach[J].Journal of Navigation,2013,66(1):17-33.
[4]王司,鄧正隆.慣導系統動基座對準技術綜述[J].中國慣性技術學報,2003,11(2):61- 67.WANG Si,DENG Zheng-long.Technique review of transfer alignment of inertial navigation system on moving Base[J].Journal of Chinese Inertial Technology,2003,11(2):61-67.
[5]Dai Hongde,Zhou Shaolei,Xu Qinjiu,et al.Comparison of three rapid transfer alignment algorithms[C]//International Conference on Materials Science and Information Technology.Singapore,2012:3483-3488.
[6]陳雨,趙剡,李群生.一種可觀測度分析方法及在傳遞對準中的應用[J].中國慣性技術學報,2013,21(4):467-471.CHEN Yu,ZHAO Yan,LI Qun-sheng.Observable degree analysis method and its application in transfer alignment [J].Journal of Chinese Inertial Technology,2013,21(4):467-471.
[7]楊曉霞,陰玉梅.可觀測度的探討及其在捷聯慣導系統可觀測性分析中的應用[J].中國慣性技術學報,2012,20(4):406-409.YANG Xiao-xia,YIN Yu-mei.Discussions on observability and its applications in SINS[J].Journal of Chinese Inertial Technology,2012,20(4):406-409.
[8]Long Rui,Qin Yongyuan,Jia Jichao.Observable degree analysis of SINS initial alignment based on singular value decomposition[C]//IEEE International Symposium on Knowledge Acquisition and Modeling Workshop.Wuhan,China,2008:444-448.
[9]Pehlivanoglu A G,Ercan Y.Investigation of flexure effect on transfer alignment performance[J].Journal of Navigation,2013,66(1):1-15.
[10]Wu Wei,Chen Sheng,Qin Shiqiao.Online estimation of ship dynamic flexure model parameters for transfer alignment[J].IEEE Transactions on Control Systems Technology,2013,21(5):1666-1678.
[11]韓鵬鑫,穆榮軍,崔乃剛.兩種坐標系下慣導傳遞對準效果比較[J].中國慣性技術學報,2010,18(3):272-278.HAN Peng-xin,MU Rong-jun,CUI Nai-gang.Comparison between transfer alignments of inertial navigation system in two coordinates[J].Journal of Chinese Inertial Technology,2010,18(3):272-278.
Adaptive filtering algorithm based on observable degree analysis of state parameters in carrier-aircraft transfer alignment
LIANG Hao1,WANG Dan-dan2,MU Rong-jun1
(1.Department of Astronautics,Harbin Institute of Technology,Harbin 150001,China;2.China Academy of Launch Vehicle Technology,Beijing 100076,China)
In view of the characteristics of limited maneuver and poor observable degree in carrier-aircraft INS’s transfer alignment,an adaptive filtering algorithm based on observable degree analysis of state parameters is proposed.The state parameters’ observable degree is quantized,and the adaptive factors are constructed based on grouping mechanism.Filtering gain attenuation technique is used to process the variables channels with poor observable degree in order to improve the accuracy and stability of filtering estimation.Simulation results show that the adaptive filtering algorithm has higher precision and faster convergence speed compared to classic methods,which could improve alignment precision to 2′ from 3′ and shorten filtering time to 8 min from 15 min.
carrier-aircraft,transfer alignment,observable degree analysis,filtering gain attenuation
V249.32
:A
1005-6734(2014)01-0058-05
10.13695/j.cnki.12-1222/o3.2014.01.012
2013-10-18;
:2014-01-02
國防基礎科研項目(C0320110001)
梁浩(1987—),男,博士研究生,研究方向為初始對準及信息融合。E-mail:liangwangyihao@163.com
聯 系 人:穆榮軍(1969—),男,副教授,博士生導師。E-mail:murjun@163.com
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36