RBF神經網絡在恒流靜壓軸承靜剛度預測中的應用
2014-07-21 00:58:04連黎明唐軍
軸承 2014年2期
連黎明,唐軍,2
(1.新鄉學院 機電工程學院,河南 新鄉 453003;2.河南理工大學 機械與動力工程學院,河南 焦作 454000)
液體靜壓軸承能提供廣泛的液膜厚度以及較高的液膜剛度,具有功率損耗小,即使在很低的轉速下也能平穩工作等特點,被廣泛應用在重型裝備中并成為核心部件[1-2]。按供油方式區分,液體靜壓軸承主要有恒流供油和恒壓供油2種[3]。目前,國內研究主要集中在恒壓系統方面,而關于恒流靜壓軸承的理論研究還較少。下文給出恒流靜壓軸承徑向剛度的理論表達式,并借助RBF神經網絡高度的非線性映射能力建立卸荷壓力、心軸壓力、徑向油缸推力與油膜剛度的關系。
1 靜態剛度表達式
以國內某公司SKZT3500數控轉臺為研究對象,其最大的特點就是同時采用了恒流靜壓軸承和卸荷導軌2套液壓系統。數控轉臺裝配圖如圖1所示,恒流靜壓心軸結構如圖2所示。
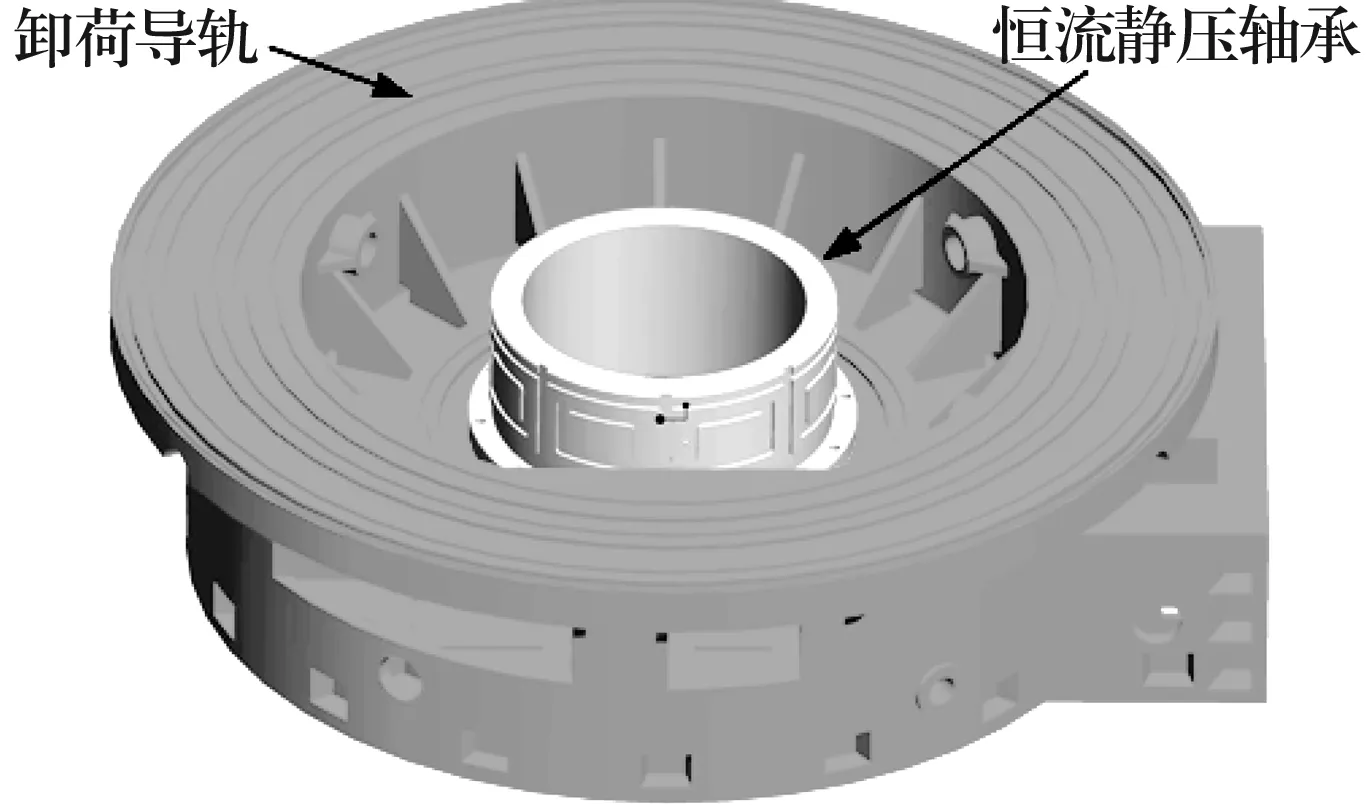
圖1 數控轉臺裝配圖

圖2 恒流靜壓心軸圖
恒流靜壓軸承是借助多頭泵,將恒定流量的液壓油注入環形靜壓油腔中,利用心軸油腔封油邊和軸承外圈(即軸瓦)之間的間隙產生節流作用,形成一層均壓油膜浮起軸瓦,以克服切削過程中產生的徑向阻力。卸荷導軌是通過環形油腔產生的推力將一部分載荷卸掉,減少導軌磨損,避免爬行。但是,卸荷導軌與滑動面之間仍存在一定的直接接觸。
數控轉臺用恒流靜壓軸承由8個對稱均布的回形油腔組成(圖3)。回形油腔中間承載區面積最大,占總面積61.5%,此區域油壓最大且基本恒定。考慮其結構特點,將8油墊支承簡化為4對斜置平面支承。回形油腔亦可簡化為矩形油腔,其簡化結構如圖4所示。
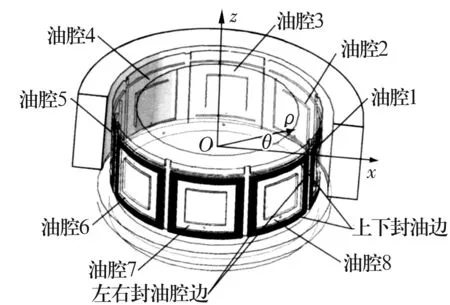
圖3 靜壓心軸油腔分布圖
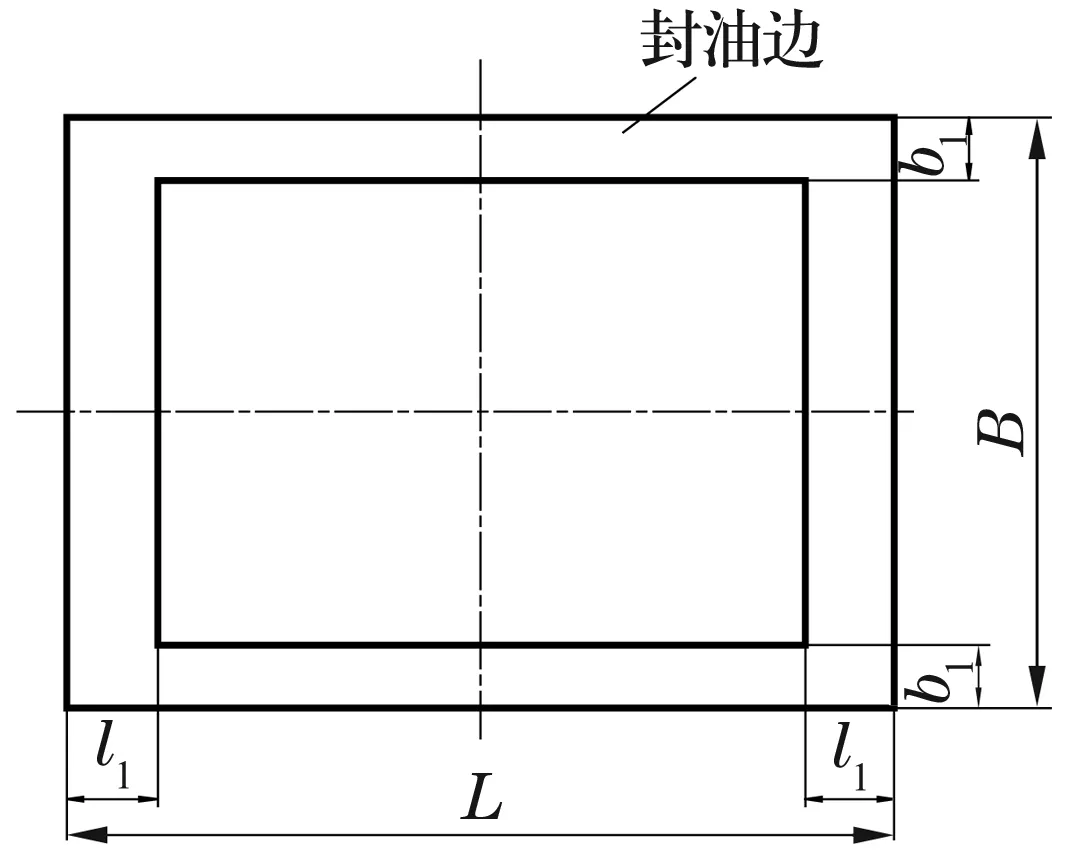
圖4 靜壓油腔簡化圖
恒流靜壓軸承的心軸與軸瓦是封閉式結合體,心軸與軸瓦之間的間隙(即油膜厚度h0)有限而且為均勻分配。當軸瓦偏移ex=h0時,心軸與軸瓦表面會直接接觸,進而導致其不能正常工作。
1.1 軸頸無外加載荷時[4]
當軸徑上無外載荷作用時,卸荷導軌相對接觸面間不會產生徑向載荷。因所用恒流靜壓軸承油腔采用對稱布置,在油墊尺寸相同、油腔壓力ps一樣時,靜壓油墊產生的推力Ts也一樣,故能將軸瓦懸浮在心軸幾何中心,并消除形狀誤差對整體運動精度的影響。這樣,根據2油腔尺寸、結構相同又呈相對布置,2個相對油腔的排油量為
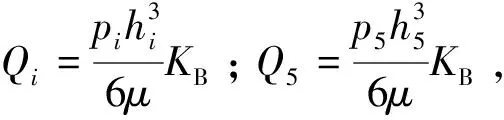

(1)
油墊推力T=psAe,
(2)
式中:KB為油腔腔型結構尺寸參數;Ae為等效承載面積;pi,Qi,hi分別為油腔i的壓力、流量、油膜厚度;μ為液壓油的動力黏度。
1.2 軸頸有外加載荷時[4]
當軸徑上有外載荷F時,相對接觸面間會產生徑向載荷C,卸荷導軌相對接觸面間產生了滑動。同時,軸瓦相對靜壓心軸也將產生偏移(即油膜厚度發生變化)。靜壓心軸徑向軸承結構簡圖及受力情況如圖5所示。
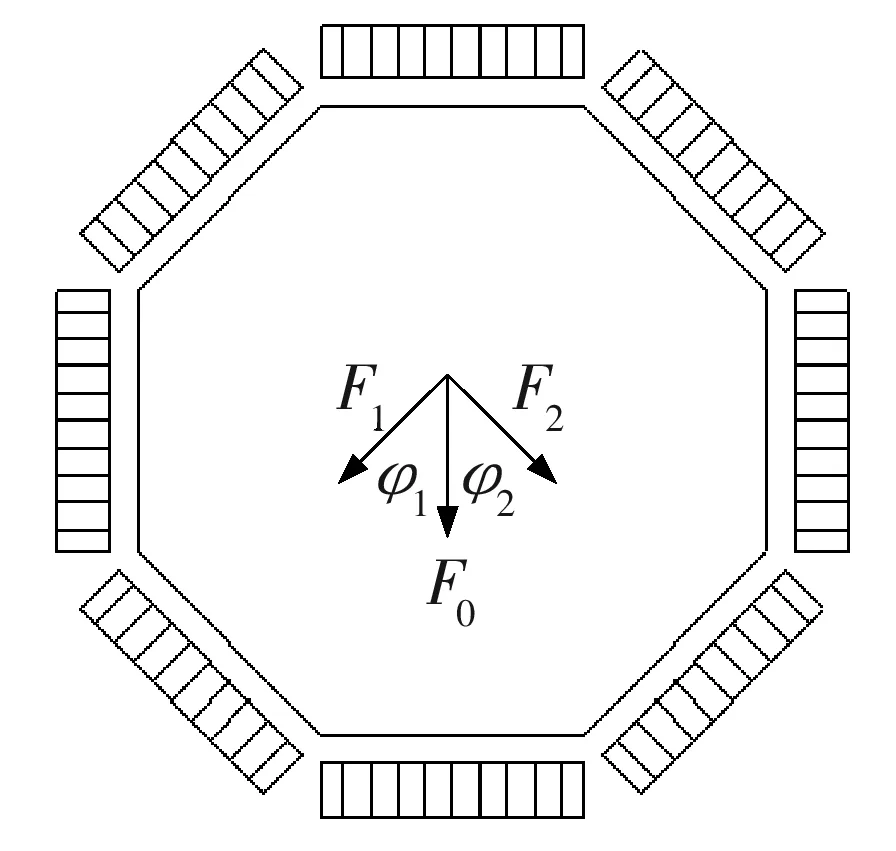
圖5 靜壓心軸徑向軸承結構簡圖
卸荷系數為a0=Wc/W0,卸荷導軌的動摩擦因數為fc=f(W0-Wc)/W0=f(1-a0),其中,Wc為卸荷油墊實際承受的載荷;W0為卸荷油墊液態潤滑時承受的載荷;f為滑動導軌的動摩擦因數。產生的徑向載荷為C=fcW總(W總為轉臺軸向總載荷)。
按恒流徑向軸承力平衡條件可得
F=Fx+C=F0+F1cosφ1+F2cosφ2+C,
(3)
式中:Fx為恒流油腔承受的徑向載荷;F1=F2;φ1=φ2=45°。
油膜徑向剛度為
(4)
間隙比為
(5)
恒流油腔承受的徑向載荷為
(6)
式中:φ1和φ2為斜置平面與載荷F的夾角;hx為動態油膜厚度;ex為軸瓦徑向等效偏移量。
2 RBF神經網絡結構及拓撲算法
RBF神經網絡是神經網絡中最重要的模型之一。RBF神經網絡是一種性能良好的前向神經網絡,具有收斂速度快、網絡結構簡單、逼近性能良好及不存在局部極小等優點。從理論上也已經證明,只要隱含層神經元的數量足夠多,RBF神經網絡能以任意精度逼近任何單值連續函數[5]。RBF神經網絡由3層組成,包括輸入層、隱含層和輸出層,其中隱含層的神經元數目視具體(問題)情況而定。綜合考慮文中研究對象與RBF神經網絡結構的特點,采用3層RBF網絡建模會得到較好的映射效果。
2.1 RBF網絡算法基本原理
用RBF作為隱單元的“基”構成隱含層空間,將輸入向量直接(即不需要通過權連接)映射到隱空間,當RBF的中心點確定后,映射關系也就確定。并且隱含層空間到輸出空間的映射關系是線性的[5]。RBF網絡的拓撲結構如圖6所示。
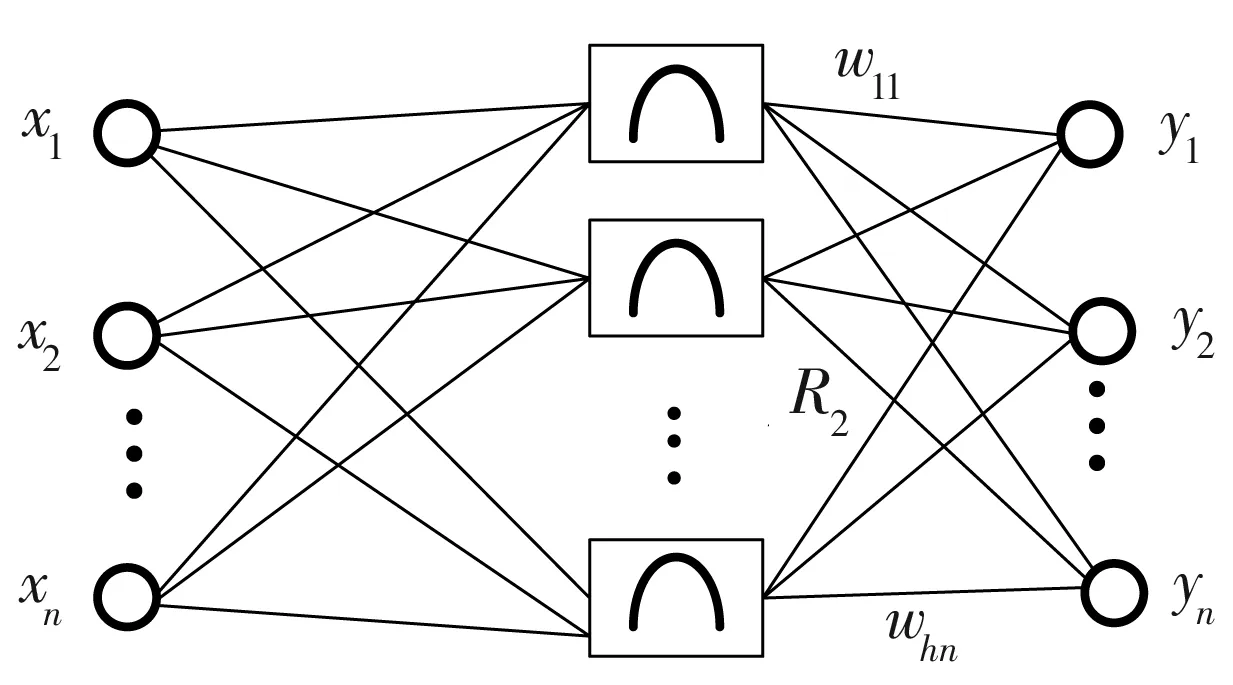
圖6 RBF神經網絡拓撲結構
2.2 RBF網絡結構
(1)輸入層的確定。根據試驗條件和要求,可以確定神經網絡輸入層有卸荷壓力、心軸壓力和油缸徑向推力3個神經元。
(2)隱含層的確定。目前,隱含層神經元個數的選擇還沒有完善的理論來指導,只能結合實際情況進行試探性選擇,再逐步進行優化。本試驗確定隱含層中的神經元數為16個。
(3)輸出層的確定。根據試驗條件和要求,可以確定神經網絡輸出層只有油膜剛度1個神經元。
2.3 RBF網絡訓練與驗證[5-6]
2.3.1 選取訓練樣本數據
為了獲取訓練樣本,試驗在各種不同的卸荷壓力、心軸壓力、油缸徑向推力條件下,獲取軸承的徑向位移量。其中,卸荷壓力分別為0.25,0.40 MPa;心軸壓力P1分別為0.6,1.0,1.5和2.0 MPa;油缸徑向推力T1分別為9.8,19.6,29.4和39.2 kN。試驗最終得到的32組數據用于網絡訓練,并將其中4組數據用于網絡評測。
2.3.2 參數選擇及訓練
初始化網絡的訓練參數。訓練誤差值為0.1,散步常數為l,顯示頻率為1,隱含層的最大神經元數為20。用以上參數對所設計的RBF神經網絡進行訓練,當訓練循環到第440次時,網絡收斂到事先設定的目標誤差0.1,如圖7所示。若以P1代表輸入向量,T1代表輸出向量,則創建BP網絡的程序代碼如下。
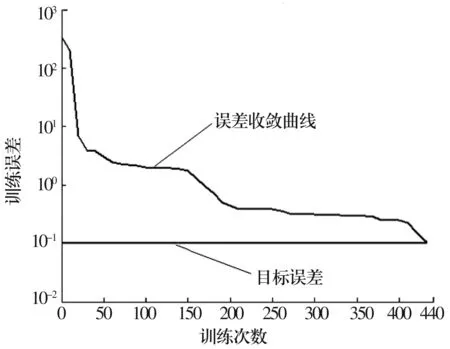
圖7 誤差收斂示意圖
goal=1e-1%訓練誤差的平方和為0.1;
spread=1 %散步常數為l;
mn=20 %最大神經元數為20;
df=1 %顯示時間間隔為1;
net=newgrb(P1,T1,goal,spread,mn,df)
%建立神經網絡。
2.3.3 網絡驗證
為了驗證該網絡,選用4個樣本點來檢驗網絡的預測結果。網絡預測值見表1。

表1 網絡預測結果
3 結束語
(1) 恒流靜壓軸承液壓系統簡單,不需要額外的節流裝置與精密過濾裝置,一般不宜產生堵塞失效事故。從理論上分析了SKZT3500數控轉臺用恒流靜壓軸承與卸荷導軌的特點,并給出了恒流靜壓軸承徑向剛度表達式。
(2) RBF神經網絡具有高度的非線性映射能力,可實現預測功能,特別是在處理恒流靜壓軸承這種多因素影響問題上更加凸顯了其優點。文中提出的恒流靜壓軸承靜剛度RBF神經網絡預測具有一定的泛化能力,完全可以滿足工程應用。
