基于混沌理論的滾動(dòng)軸承故障信號(hào)判據(jù)
2014-07-22 00:42:34任學(xué)平劉桐桐
軸承 2014年1期
任學(xué)平,劉桐桐
(內(nèi)蒙古科技大學(xué) 機(jī)械工程學(xué)院,內(nèi)蒙古 包頭 014010)
旋轉(zhuǎn)機(jī)械是應(yīng)用廣泛的機(jī)械設(shè)備,在各行各業(yè)中都起著至關(guān)重要的作用,而軸承則是旋轉(zhuǎn)機(jī)械設(shè)備的主要部件,由軸承故障導(dǎo)致的旋轉(zhuǎn)機(jī)械故障占到其總故障的一半以上,造成了巨大的經(jīng)濟(jì)損失[1]。
Duffing振子方程是近幾年提出的能夠判斷機(jī)械故障的有效方法之一,該方法對(duì)特定頻率的微弱正弦信號(hào)具有敏感依賴性,而對(duì)其他無(wú)關(guān)信號(hào)則具有很強(qiáng)的抑制作用[2-3],能夠檢測(cè)出淹沒(méi)在強(qiáng)噪聲信號(hào)中的微弱正弦信號(hào)。可用于判斷旋轉(zhuǎn)設(shè)備故障。
1 Duffing振子基本理論
傳統(tǒng)的Duffing振子方程為
x″+kx′-αx3+βx5=frcos(ω0t)+s,
(1)
式中:-αx3+βx5為非線性恢復(fù)力;frcos(ω0t)為內(nèi)置周期策動(dòng)力;k為阻尼系數(shù);s為待測(cè)信號(hào)。
利用四階Runge-Kutta法[4]對(duì)(1)式進(jìn)行微分求解并令x′=y, 則(1) 式變形為
(2)
混沌系統(tǒng)的一個(gè)主要特征就是存在混沌吸引子,并且每一個(gè)參數(shù)變量都對(duì)應(yīng)著一個(gè)奇怪吸引子,傳統(tǒng)方程存在5個(gè)參數(shù)變量,因此得到的相軌跡應(yīng)該是5條曲線的混合體。
方程中的限制參數(shù)越多,最終得到的結(jié)果就越接近真實(shí)情況。因此在上述方程的基礎(chǔ)上,對(duì)Duffing方程進(jìn)行改進(jìn),對(duì)方程的嵌入維數(shù)和最大lyapunov指數(shù)進(jìn)行計(jì)算[5],并經(jīng)過(guò)多次嘗試,最終將傳統(tǒng)方程的非線性恢復(fù)力由-αx3+βx5變?yōu)?αx3+βx5+γx7,此時(shí)得到的混沌方程仍然具有混沌特性,限制參數(shù)則由原來(lái)的5個(gè)變?yōu)?個(gè),更能夠反映待測(cè)信號(hào)中故障信息的特征參數(shù)。變形之后的方程為
(3)
現(xiàn)令s=acos(15t)+randn(1,n),將其加入(3)式中,利用MATLAB進(jìn)行仿真,結(jié)果如圖1所示,圖中橫、縱坐標(biāo)分別表示輸出信號(hào)的速度(m/s)、位移(m)(圖4、圖6同)。由圖可知,加入模擬信號(hào)后,系統(tǒng)由混沌狀態(tài)進(jìn)入到大尺度周期狀態(tài),證明了微弱正弦信號(hào)的存在。

圖1 加入模擬信號(hào)前后系統(tǒng)的相軌跡
研究發(fā)現(xiàn),系統(tǒng)的輸出和的方差具有一定的規(guī)律性:當(dāng)外加周期信號(hào)的頻率與內(nèi)置周期策動(dòng)力的頻率相同時(shí),系統(tǒng)的輸出和的方差最大;而當(dāng)兩者頻率不相同時(shí),系統(tǒng)的輸出和的方差總是偏小于該最大值;并且當(dāng)外加周期信號(hào)的頻率接近于內(nèi)置周期策動(dòng)力的頻率時(shí),系統(tǒng)的輸出信號(hào)相比其他值會(huì)發(fā)生明顯的變化。對(duì)上述模擬信號(hào)進(jìn)行處理得到的輸出信號(hào)x(t)和y(t)的方差如圖2所示。
通過(guò)圖2可以看出,當(dāng)內(nèi)置周期策動(dòng)力頻率fr=15 Hz時(shí),2個(gè)方差均出現(xiàn)了很大的波峰,從而也反映出待測(cè)模擬信號(hào)中存在頻率為15 Hz的微弱周期信號(hào)。與給定的輸入模擬信號(hào)相吻合。利用改進(jìn)的Duffing方程通過(guò)2種不同的角度都能判斷出故障信號(hào)的存在,證明了該方法的有效性和可行性。
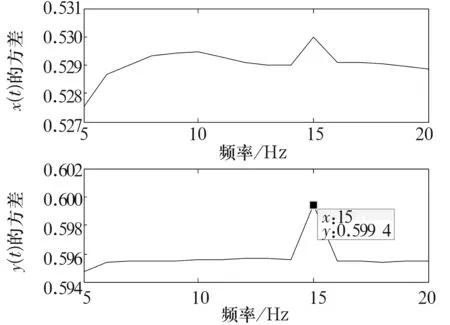
圖2 模擬信號(hào)最大lyapunov指數(shù)圖
2 利用改進(jìn)方程檢測(cè)旋轉(zhuǎn)機(jī)械故障
通過(guò)模擬信號(hào)對(duì)改進(jìn)方程進(jìn)行的仿真,證明改進(jìn)方程能夠檢測(cè)出故障信號(hào),為進(jìn)一步證明該方法在現(xiàn)場(chǎng)環(huán)境中也能檢測(cè)出旋轉(zhuǎn)機(jī)械的故障信號(hào),分別利用Duffing方程對(duì)參數(shù)(節(jié)圓直徑、滾動(dòng)體直徑、滾動(dòng)體數(shù)、接觸角)已知和未知的軸承進(jìn)行檢測(cè)。檢測(cè)數(shù)據(jù)通過(guò)振動(dòng)測(cè)試試驗(yàn)臺(tái)獲取,測(cè)量時(shí)采用3通道加速度傳感器,采樣頻率為2 000 Hz,電動(dòng)機(jī)轉(zhuǎn)速為1 450 r/min。
2.1 已知參數(shù)的軸承信號(hào)檢測(cè)
測(cè)試軸承為N205EM圓柱滾子軸承,軸承安裝在振動(dòng)測(cè)試試驗(yàn)臺(tái)上,外圈固定,內(nèi)圈旋轉(zhuǎn),測(cè)試裝置如圖3所示。
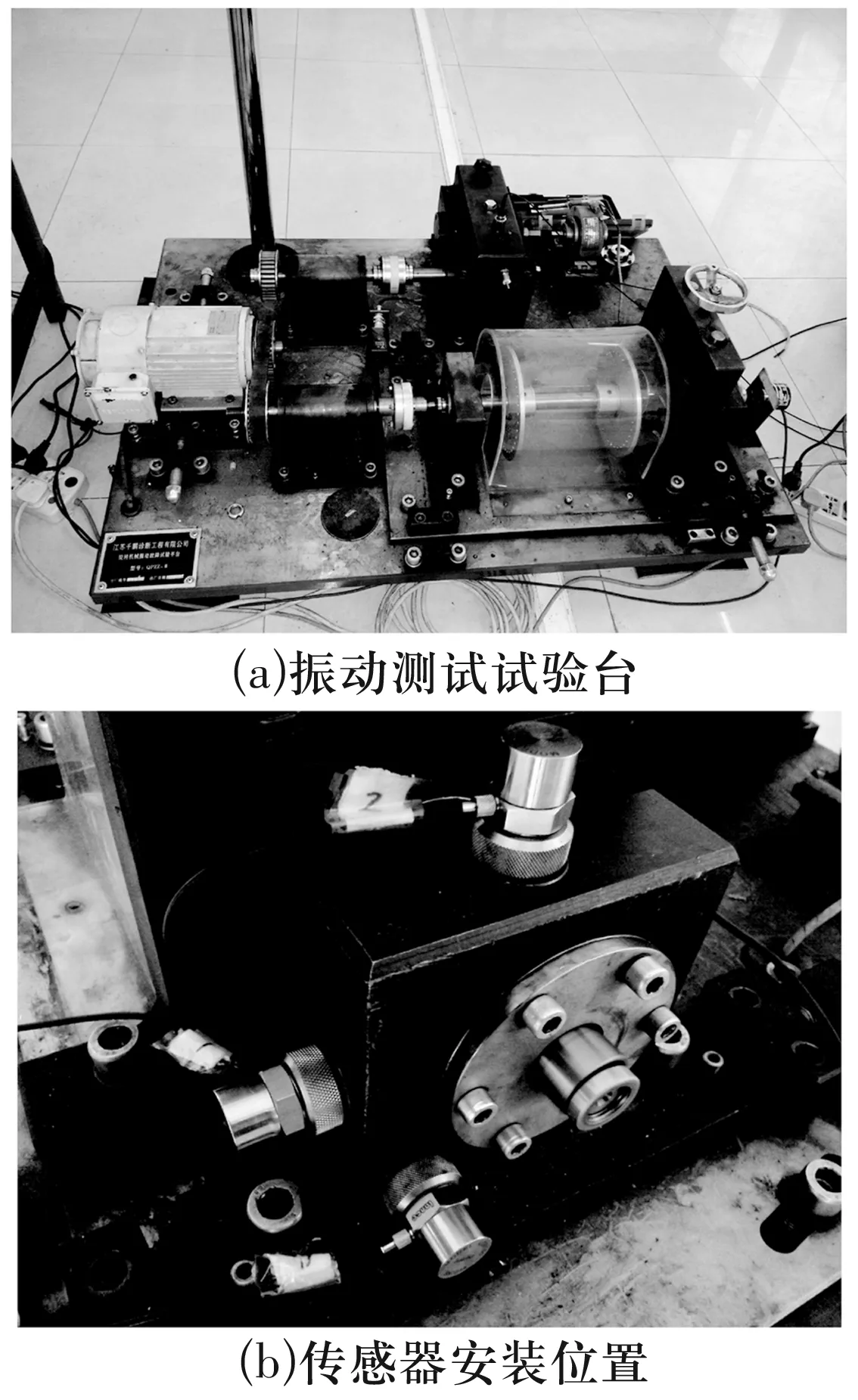
圖3 軸承信號(hào)采集裝置
試驗(yàn)過(guò)程中,首先采集10組正常軸承信號(hào),然后將軸承換成事先加工好的故障軸承(內(nèi)圈故障、外圈故障及滾動(dòng)體故障)。內(nèi)、外圈故障采用鉬絲切割機(jī)在滾道上切割深度和寬度均為0.5 mm、長(zhǎng)度為套圈寬度的長(zhǎng)方形槽,滾動(dòng)體故障為直徑0.5 mm、深度0.2 mm的小圓坑。
滾動(dòng)體直徑7.5 mm,滾子組節(jié)圓直徑39 mm,滾動(dòng)體數(shù)12,接觸角0。數(shù)據(jù)的采樣頻率為2 000 Hz,采樣點(diǎn)N=2 048,電動(dòng)機(jī)轉(zhuǎn)速n=1 450 r/min。計(jì)算所得軸承各部件故障頻率見(jiàn)表1。
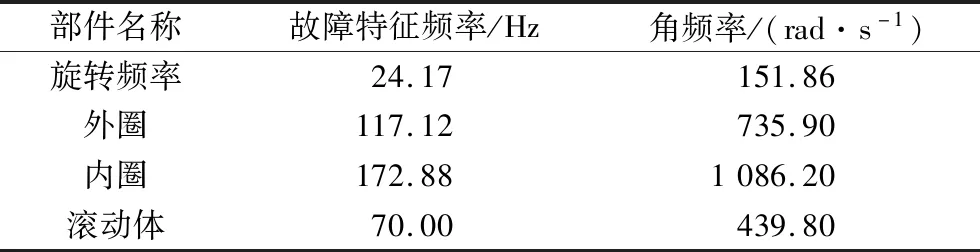
表1 軸承各位置故障頻率
在此,針對(duì)外圈故障進(jìn)行說(shuō)明,其他故障與此同理。根據(jù)軸承外圈的各個(gè)特征參數(shù)設(shè)計(jì)出的Duffing振子方程為

(4)
將采集到的3種故障信號(hào)加入到(4)式中,利用MATLAB進(jìn)行計(jì)算,得到的相軌跡如圖4所示。通過(guò)比較看出,系統(tǒng)只有在加入外圈故障時(shí)相軌跡變?yōu)橹芷跔顟B(tài),其余均處于混沌狀態(tài)。說(shuō)明該方法有效判斷出了軸承故障位置。
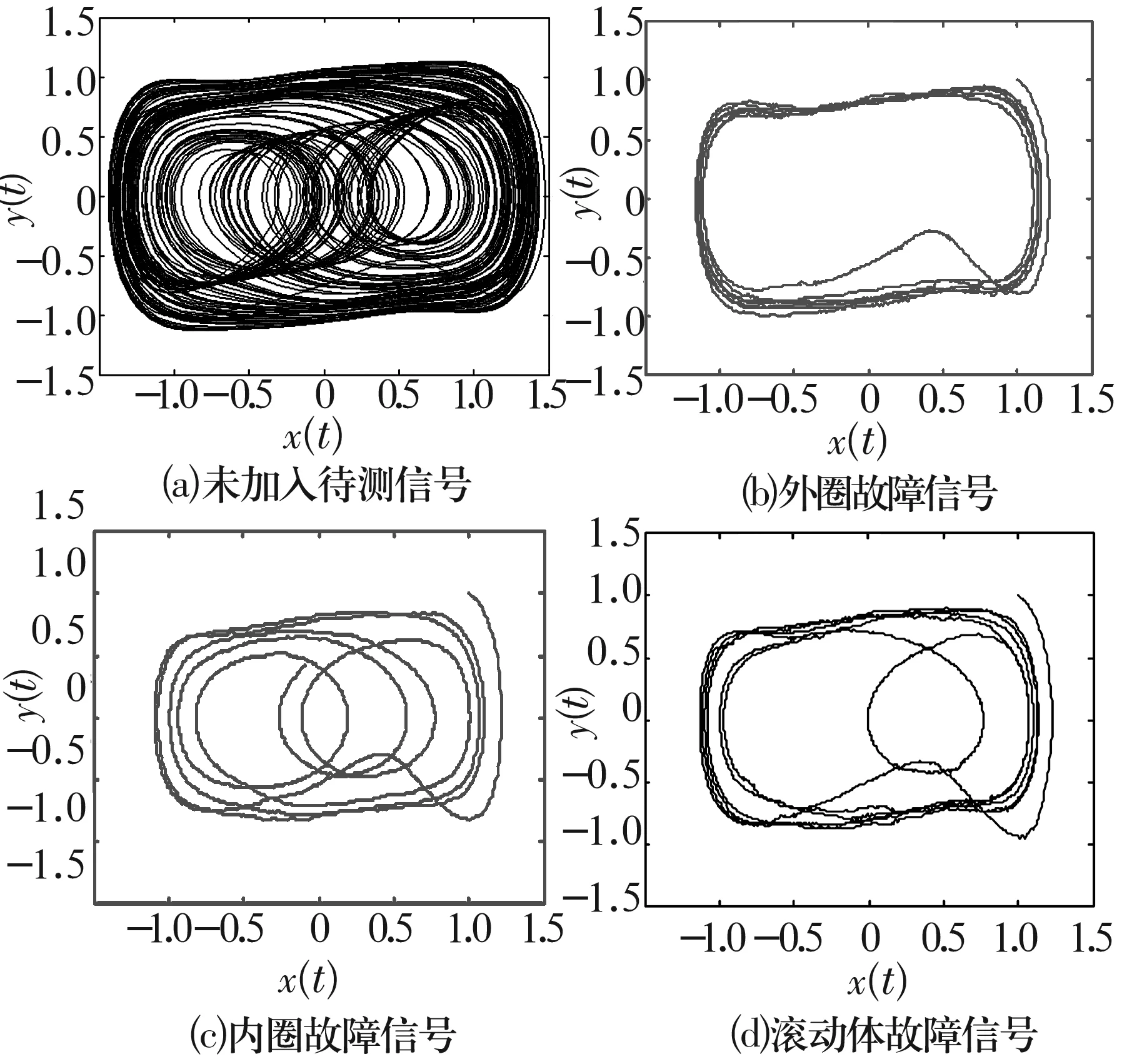
圖4 加入待測(cè)軸承信號(hào)前后系統(tǒng)的相軌跡
2.2 未知參數(shù)軸承信號(hào)檢測(cè)
在現(xiàn)場(chǎng)測(cè)試復(fù)雜設(shè)備的振動(dòng)信號(hào)時(shí),往往不知道其中部件的參數(shù),當(dāng)系統(tǒng)發(fā)生故障之后,對(duì)軸承內(nèi)圈、外圈、滾動(dòng)體各設(shè)計(jì)一個(gè)Duffing方程,分別去測(cè)試采集到的數(shù)據(jù),系統(tǒng)相圖發(fā)生變化的即為故障所處位置。
現(xiàn)以某內(nèi)圈故障軸承為例進(jìn)行分析,采集故障信號(hào)時(shí)將電動(dòng)機(jī)轉(zhuǎn)速設(shè)為1 200 r/min,用(3)式進(jìn)一步計(jì)算,式中ω0在50~150 Hz之間變化,其余均為常數(shù),ω0步長(zhǎng)為1 Hz,計(jì)算得軸承故障信號(hào)在系統(tǒng)內(nèi)置周期策動(dòng)力發(fā)生變化時(shí)的輸出方差如圖5所示。
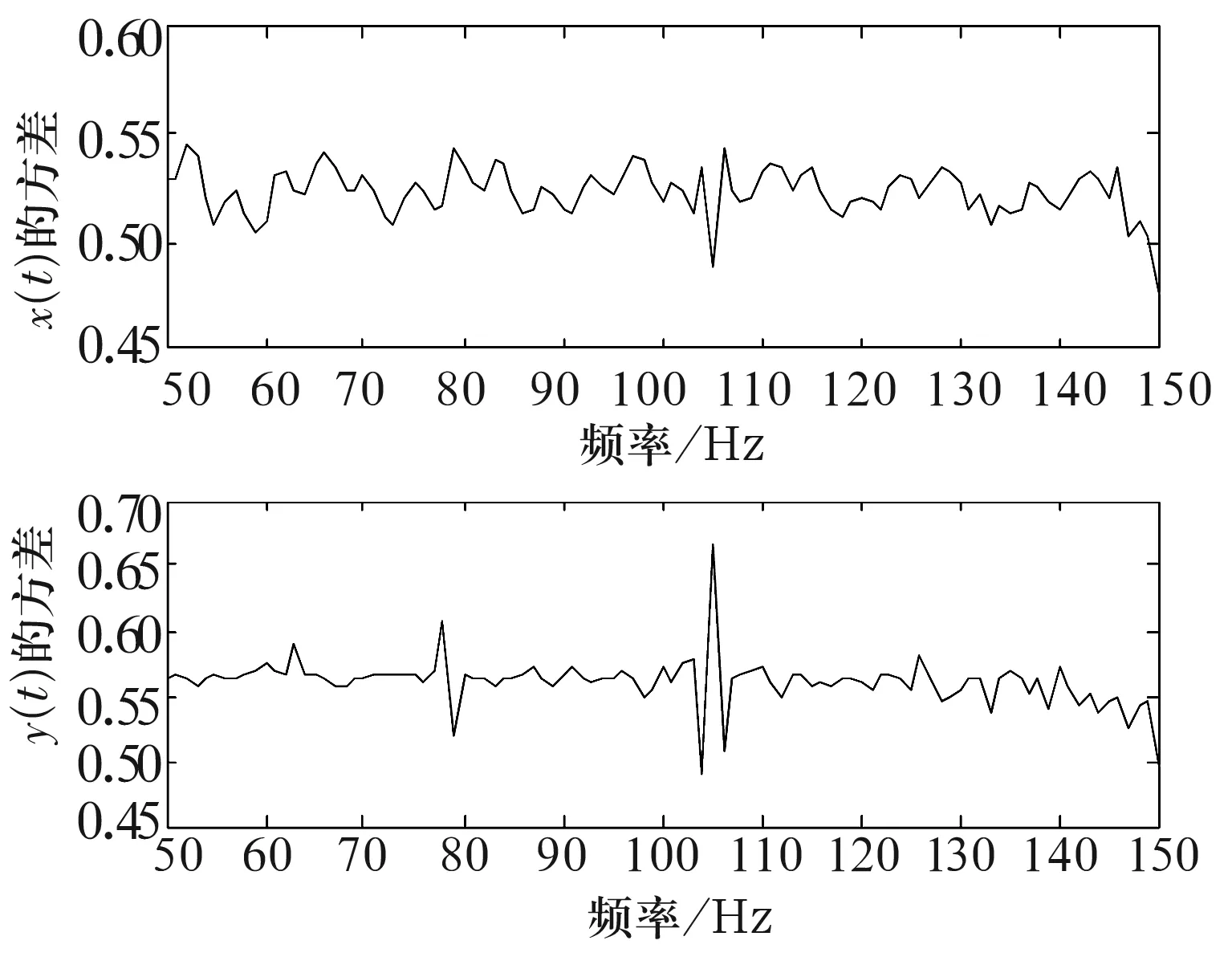
圖5 軸承故障輸出方差
通過(guò)圖5可以看出,軸承故障在內(nèi)置周期策動(dòng)力頻率為107 Hz時(shí)輸出方差存在峰值,因此可以推斷軸承的故障頻率在107 Hz左右,據(jù)此設(shè)計(jì)的Duffing振子方程為
(5)
其中,ω在107 Hz附近變化,最終發(fā)現(xiàn)當(dāng)ω=106.5 Hz時(shí),將測(cè)得的軸承故障信號(hào)加入到(5)式中,系統(tǒng)相軌跡發(fā)生突變,得到的軸承故障相軌跡如圖6所示。

圖6 內(nèi)圈故障軸承的相軌跡
通過(guò)圖6可以看出,在加入軸承故障信號(hào)之后,系統(tǒng)由混沌狀態(tài)變?yōu)榇蟪叨戎芷跔顟B(tài),反映出軸承故障信號(hào)中存在特征頻率為106.5 Hz附近的微弱正弦信號(hào)。軸承的故障頻率與其參數(shù)的關(guān)系為[6]
(6)
式中:Dw為滾動(dòng)體直徑,mm;Dpw為軸承節(jié)圓直徑,mm;α為接觸角;Z為滾動(dòng)體數(shù);n為軸承轉(zhuǎn)速,r/min;fr為軸承轉(zhuǎn)動(dòng)頻率。
同理,改變轉(zhuǎn)速為1 450,1 500及1 750 r/min,將得到的特征頻率分別代入(6)式,得到四元一次方程組,通過(guò)求解得Dw=8 mm,Dpw=39 mm,α=0°,Z=9,所得數(shù)據(jù)與6205-2RS SKF深溝球軸承數(shù)據(jù)相同,可以判斷出故障軸承為深溝球軸承內(nèi)圈故障,與事先給定的結(jié)果相同。
3 結(jié)束語(yǔ)
利用改進(jìn)Duffing振子方程對(duì)參數(shù)已知和參數(shù)未知的滾動(dòng)軸承故障進(jìn)行判斷得知,該方法能夠判斷出旋轉(zhuǎn)機(jī)械部件的故障所在,并且簡(jiǎn)單直觀,對(duì)于今后旋轉(zhuǎn)機(jī)械故障信號(hào)的判別將會(huì)有很好的應(yīng)用空間。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
