渝黔鐵路天坪特長(zhǎng)隧道GPS建網(wǎng)及橫向貫通誤差預(yù)計(jì)
2014-07-25 11:29:01呂宏權(quán)
鐵道勘察 2014年5期
關(guān)鍵詞:數(shù)據(jù)處理測(cè)量
劉 斌 呂宏權(quán)
(中鐵隧道集團(tuán)一處有限公司,重慶 401121)
渝黔鐵路天坪特長(zhǎng)隧道GPS建網(wǎng)及橫向貫通誤差預(yù)計(jì)
劉 斌 呂宏權(quán)
(中鐵隧道集團(tuán)一處有限公司,重慶 401121)
介紹天坪特長(zhǎng)隧道GPS建網(wǎng)的網(wǎng)形設(shè)計(jì)原則、數(shù)據(jù)的采集和處理,對(duì)長(zhǎng)基線的刪減、約束點(diǎn)的穩(wěn)定性及觀測(cè)質(zhì)量進(jìn)行分析,闡述了GPS控制網(wǎng)影響隧道橫向貫通的主要因素,并估算了天坪特長(zhǎng)隧道的最大橫向貫通誤差。
特長(zhǎng)隧道 GPS 控制建網(wǎng) 貫通誤差 預(yù)計(jì)
渝黔鐵路擴(kuò)能改造工程天坪隧道長(zhǎng)13.978 km,為單洞雙線鐵路隧道。隧道正洞設(shè)有進(jìn)口、出口,1個(gè)斜井、3個(gè)施工作業(yè)工點(diǎn)。全線由北向南,多為高山、丘陵地區(qū),海拔高度多在700~900 m之間。區(qū)內(nèi)主要交通道路為210國(guó)道、鄉(xiāng)村道路及田間機(jī)耕路,溝渠坑塘密布,控制點(diǎn)間通視條件較差。進(jìn)口位于鳳梅崖南側(cè)山腰,斜井位于鳳梅崖北側(cè)天坪鄉(xiāng),出口地形復(fù)雜且距斜井較遠(yuǎn),采用常規(guī)測(cè)量建網(wǎng)方法難度大,且工作效率低、費(fèi)用高、建網(wǎng)精度較差。針對(duì)天坪隧道實(shí)際情況,決定采用GPS定位測(cè)量來(lái)建立該隧道施工的洞外平面控制網(wǎng)。
1 長(zhǎng)大隧道GPS平面控制建網(wǎng)
隨著GPS技術(shù)的發(fā)展,現(xiàn)在長(zhǎng)大隧道的平面控制測(cè)量大都采用GPS靜態(tài)定位模式。對(duì)于單一大型結(jié)構(gòu)物,采用GPS靜態(tài)定位精度高、控制網(wǎng)圖形結(jié)構(gòu)簡(jiǎn)單、易施測(cè),平面控制的觀測(cè)值成果精度和質(zhì)量可靠性能夠得到保證。
1.1 長(zhǎng)大隧道GPS建網(wǎng)要求
長(zhǎng)大隧道進(jìn)行GPS平面控制網(wǎng)施測(cè)前應(yīng)進(jìn)行控制網(wǎng)設(shè)計(jì),根據(jù)結(jié)構(gòu)物長(zhǎng)度、規(guī)范規(guī)定,結(jié)合測(cè)區(qū)實(shí)際情況,以環(huán)形網(wǎng)結(jié)構(gòu)進(jìn)行同步環(huán)觀測(cè),施測(cè)的環(huán)路之間以接邊或接網(wǎng)的形式擴(kuò)網(wǎng),從而形成封閉式的整體GPS觀測(cè)網(wǎng);網(wǎng)形設(shè)計(jì)時(shí)注意結(jié)構(gòu)物兩端的控制點(diǎn)間相對(duì)精度、高程面位置和通視情況。
1.2 天坪隧道GPS建網(wǎng)設(shè)計(jì)
天坪隧道總長(zhǎng)度約14 km,隧道施工除進(jìn)出口外,中部設(shè)有1個(gè)斜井、3個(gè)施工洞口,場(chǎng)地較為狹窄,地勢(shì)變化復(fù)雜。根據(jù)隧道地形特點(diǎn)和施工情況,隧道進(jìn)口布設(shè)了4個(gè)控制點(diǎn),斜井3個(gè),出口5個(gè),每個(gè)洞口至少保證主要控制點(diǎn)兩方向通視,以確保采用常規(guī)儀器進(jìn)行洞內(nèi)施工引測(cè),GPS構(gòu)網(wǎng)控制點(diǎn)見(jiàn)圖1。
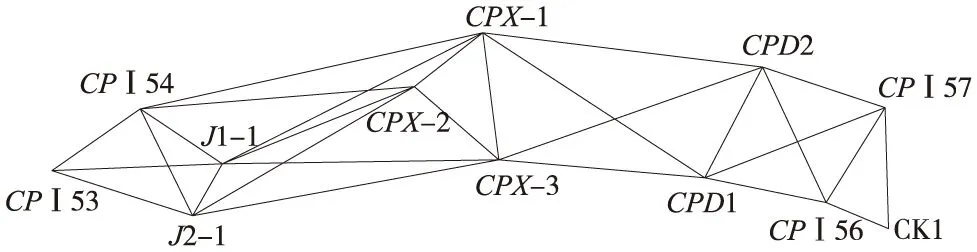
圖1 GPS控制點(diǎn)構(gòu)網(wǎng)示意
平面控制網(wǎng)的設(shè)計(jì)符合《高速鐵路工程測(cè)量規(guī)范》規(guī)定[1],設(shè)計(jì)精度為高鐵二等GPS控制網(wǎng),基本技術(shù)指標(biāo)見(jiàn)表1。為保證衛(wèi)星信號(hào)的質(zhì)量,測(cè)站周圍應(yīng)保證視野開闊、地質(zhì)條件良好、高度角15°以上、無(wú)障礙物等;為減少垂線偏差對(duì)方位傳遞的影響,各洞口的主要進(jìn)洞方向點(diǎn)位選在基本同一高程面上。
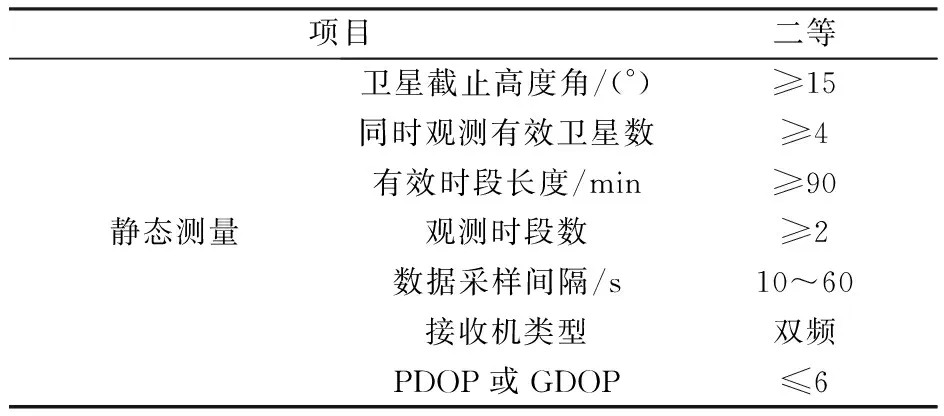
表1 高鐵二等GPS測(cè)量作業(yè)的基本技術(shù)要求[1]
2 天坪隧道GPS數(shù)據(jù)采集和質(zhì)量分析
2.1 控制網(wǎng)施測(cè)
天坪隧道GPS平面控制網(wǎng)施測(cè),采用12臺(tái)標(biāo)稱精度為±(3+0.1×10-6D)mm的天寶R8雙頻接收機(jī),對(duì)各洞口共計(jì)12個(gè)GPS點(diǎn)進(jìn)行同步觀測(cè),形成多個(gè)整體的三角形或大地四邊形控制網(wǎng),同時(shí)也可以消除儀器搬站對(duì)中誤差,增加數(shù)據(jù)檢核條件,提高工作效率。外業(yè)觀測(cè)過(guò)程中,采用新型徠卡內(nèi)置光學(xué)對(duì)點(diǎn)器的精密整平支架(見(jiàn)圖2),任意方位旋轉(zhuǎn)都能嚴(yán)格對(duì)中,確保對(duì)中誤差不大于1 mm;天線高在開機(jī)前后各量取一次,任一方向上在觀測(cè)前、后兩次量取的天線高誤差不大于±2 mm;每一同步觀測(cè)2個(gè)時(shí)段,每個(gè)時(shí)段觀測(cè)結(jié)束后,重新安置儀器,將基座轉(zhuǎn)動(dòng)并升降三腳架,再對(duì)中、整平。

圖2 對(duì)點(diǎn)器精密支架

圖4 GPS控制網(wǎng)長(zhǎng)基線刪除前
2.2 數(shù)據(jù)質(zhì)量分析
(1)數(shù)據(jù)處理方法
GPS數(shù)據(jù)處理采用隨機(jī)軟件TBC進(jìn)行觀測(cè)數(shù)據(jù)基線解算,然后利用Cosa GPS 6.0平差軟件進(jìn)行無(wú)約束平差、約束平差、精度分析及成果輸出工作,數(shù)據(jù)處理流程圖如圖3所示。
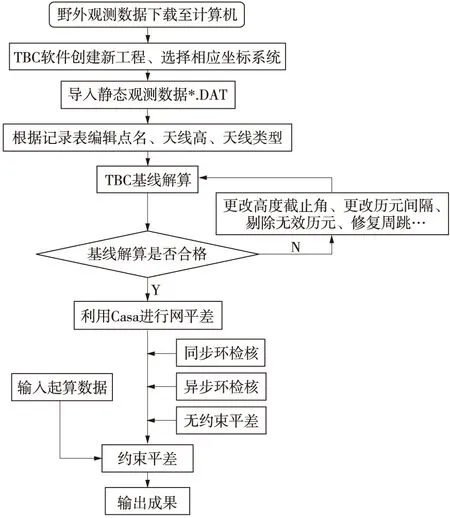
圖3 GPS數(shù)據(jù)處理流程
在鐵路GPS控制網(wǎng)布設(shè)過(guò)程中,由于線路的走向原因GPS控制網(wǎng)必為帶狀圖形,且在長(zhǎng)大隧道控制網(wǎng)方面施工工點(diǎn)位置GPS點(diǎn)布設(shè)相對(duì)較密,這樣就容易造成GPS控制網(wǎng)中控制點(diǎn)間部分邊長(zhǎng)長(zhǎng)度過(guò)于懸殊,在數(shù)據(jù)處理、同步環(huán)檢核過(guò)程中,由于長(zhǎng)邊的系統(tǒng)誤差比短邊系統(tǒng)誤差要大許多,從而導(dǎo)致長(zhǎng)邊絕對(duì)精度要比短邊低很多,這樣在整個(gè)控制網(wǎng)平差過(guò)程中將影響控制網(wǎng)的整體精度。由于所有點(diǎn)同時(shí)觀測(cè),導(dǎo)致采集的數(shù)據(jù)全、檢核條件多。為提高控制網(wǎng)的整體精度,數(shù)據(jù)處理時(shí),采用刪減長(zhǎng)基線的方法來(lái)消弱長(zhǎng)邊對(duì)于控制網(wǎng)精度的影響,如圖4、圖5所示。
(2)數(shù)據(jù)質(zhì)量分析
天坪隧道GPS控制網(wǎng)共12個(gè)GPS點(diǎn),其中4個(gè)CPI起算點(diǎn)。基線解算采用天寶TBC軟件按靜態(tài)相對(duì)定位模式進(jìn)行,采用廣播星歷,多基線向量的雙差固定解求解模式。刪除工作狀態(tài)不佳的衛(wèi)星數(shù)據(jù),刪除殘差過(guò)大且有明顯系統(tǒng)誤差的時(shí)間段,不讓其參與平差,同一時(shí)段觀測(cè)值的數(shù)據(jù)剔除率小于10%。具體要求如下。

圖5 GPS控制網(wǎng)長(zhǎng)基線刪除后
①基線向量環(huán)閉合差
在解算出每一時(shí)段的基線向量后,以三角形作為構(gòu)環(huán)圖形,并計(jì)算閉合環(huán)坐標(biāo)分量閉合差,網(wǎng)閉合環(huán)精度指標(biāo)見(jiàn)表2。各坐標(biāo)分量及全長(zhǎng)閉合差應(yīng)符合下式規(guī)定:

式中:n為閉合環(huán)邊數(shù)(n=3),δ為GPS基線向量弦長(zhǎng)中誤差/mm。
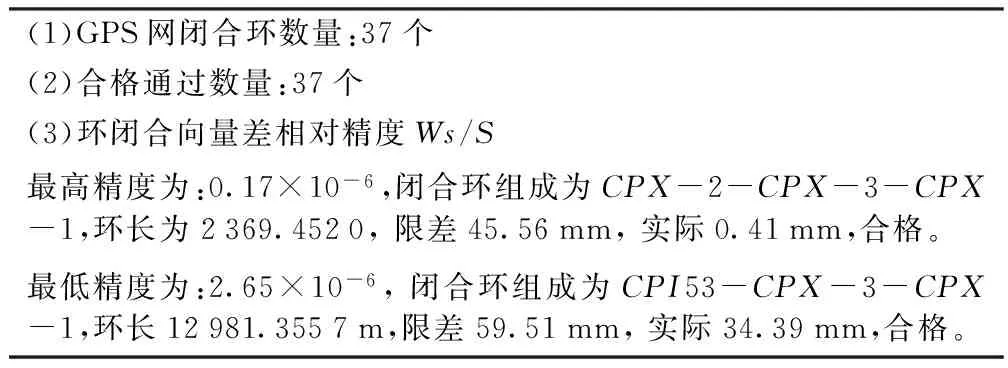
表2 網(wǎng)閉合環(huán)精度統(tǒng)計(jì)
②重復(fù)基線較差


表3 重復(fù)基線統(tǒng)計(jì)
3 GPS網(wǎng)數(shù)據(jù)平差處理
3.1 約束點(diǎn)穩(wěn)定性分析
網(wǎng)平差處理前,采用一點(diǎn)一方向計(jì)算法進(jìn)行約束點(diǎn)的穩(wěn)定性分析(見(jiàn)表4)。
從表4看出,約束點(diǎn)間相對(duì)精度均高于1/25萬(wàn),可以作為約束點(diǎn)對(duì)GPS網(wǎng)進(jìn)行平差。

表4 約束起算點(diǎn)穩(wěn)定性分析 m
3.2 平差處理
(1)三維無(wú)約束平差

三維無(wú)約束平差最弱點(diǎn)、邊精度統(tǒng)計(jì)如表5、表6(單位權(quán)中誤差=1.220 cm)。

表5 最弱點(diǎn)精度統(tǒng)計(jì) cm

表6 最弱邊精度統(tǒng)計(jì)
(2)二維約束平差
約束平差前,先進(jìn)行起算點(diǎn)的穩(wěn)定性檢驗(yàn),約束點(diǎn)間的邊長(zhǎng)滿足相對(duì)中誤差<1/250 000的要求時(shí),可以作為約束平差的起算基準(zhǔn)。約束平差采用的起算點(diǎn)應(yīng)分布在網(wǎng)的兩端均勻分布。
約束平差中基線向量各分量改正數(shù)與無(wú)約束平差同一基線改正數(shù)較差的絕對(duì)值應(yīng)滿足下式要求:dVΔx≤2σ,dVΔy≤2σ,dVΔz≤2σ,約束平差后GPS控制網(wǎng)的精度指標(biāo)應(yīng)滿足基線邊方向中誤差≤1.3″,最弱邊相對(duì)中誤差≤1/180 000的要求。
二維約束平差最弱點(diǎn)、邊精度統(tǒng)計(jì)如表7、表8(單位權(quán)中誤差=0.375 cm)。

表7 最弱點(diǎn)精度統(tǒng) cm

表8 最弱邊精度統(tǒng)計(jì)
從表7、表8中的精度統(tǒng)計(jì)看,最弱點(diǎn)的點(diǎn)位精度、最弱邊距離相對(duì)中誤差完全滿足規(guī)范精度要求,且全網(wǎng)各邊的方位角中誤差均小于±0.6″,利于隧道橫向貫通誤差的控制。
3.3 平差后成果數(shù)據(jù)檢核
按照常規(guī)測(cè)量方式,采用標(biāo)稱精度為0.5″,±(0.6+1×10-6D) mm的徠卡TM30全站儀,對(duì)各洞口主要GPS點(diǎn)位進(jìn)行角度與邊長(zhǎng)觀測(cè),通過(guò)全站儀觀測(cè)數(shù)據(jù)與GPS數(shù)據(jù)處理平差坐標(biāo)反算值進(jìn)行對(duì)比檢核。以斜井GPS點(diǎn)為例,檢核數(shù)據(jù)見(jiàn)表9。

表9 距離、角度對(duì)比
由表9可以看出,全站儀測(cè)量數(shù)據(jù)與GPS坐標(biāo)反算數(shù)據(jù)相吻合,該GPS控制網(wǎng)平差合理。
4 GPS隧道控制網(wǎng)橫向貫通誤差計(jì)算
4.1 GPS控制網(wǎng)對(duì)隧道橫向貫通的影響因素
隧道洞內(nèi)測(cè)量采用導(dǎo)線控制測(cè)量,使得洞外控制點(diǎn)的精度通過(guò)導(dǎo)線測(cè)量的方式傳遞至貫通面,洞外GPS控制網(wǎng)對(duì)隧道橫向貫通的影響因素主要通過(guò)以下兩方面體現(xiàn):
①進(jìn)、出洞控制點(diǎn)點(diǎn)位誤差。GPS定位技術(shù)能直接測(cè)定兩點(diǎn)間的相對(duì)位置,區(qū)別于傳統(tǒng)的角度與邊長(zhǎng)的測(cè)量方式,GPS隧道貫通誤差的因素主要是由進(jìn)、出口控制點(diǎn)的點(diǎn)位誤差引起。由圖4可知,進(jìn)洞點(diǎn)分別為J2-1、CPX-3、CK1,其點(diǎn)位誤差分別記為MJ、MX、MC。
②進(jìn)、出洞口定向邊長(zhǎng)和方位角。進(jìn)口、斜井、出口進(jìn)洞后視點(diǎn)分別為CPI54、CPX-2、CPI56,后視定向邊的邊長(zhǎng)及方位角分別為SJ、SX、SC和αJ、αX、αC,后視定向邊和方位角誤差分別為MSJ、MSX、MSC和MαJ、MαX、MαC。
GPS控制網(wǎng)對(duì)貫通面處的橫向貫通誤差影響值為(設(shè)P為貫通面)
(1)
4.2 天坪隧道GPS網(wǎng)橫向貫通誤差估算
天坪隧道進(jìn)口與斜井、斜井與出口共兩個(gè)貫通面,對(duì)于進(jìn)口至斜井貫通面:



式中MαJ1-J2、MαX1-X2為進(jìn)口與斜井后視邊的方位角中誤差,MJ2、MX2為用于后視點(diǎn)的點(diǎn)位中誤差,SJ1-J2、SX1-X2為進(jìn)口與斜井定向邊邊長(zhǎng),SJ1-P、SX1-P為進(jìn)洞控制點(diǎn)到貫通面P的垂直距離。
表10、表11為天坪隧道進(jìn)洞控制點(diǎn)精度統(tǒng)計(jì)。

表10 進(jìn)洞點(diǎn)點(diǎn)位中誤差統(tǒng)計(jì) mm
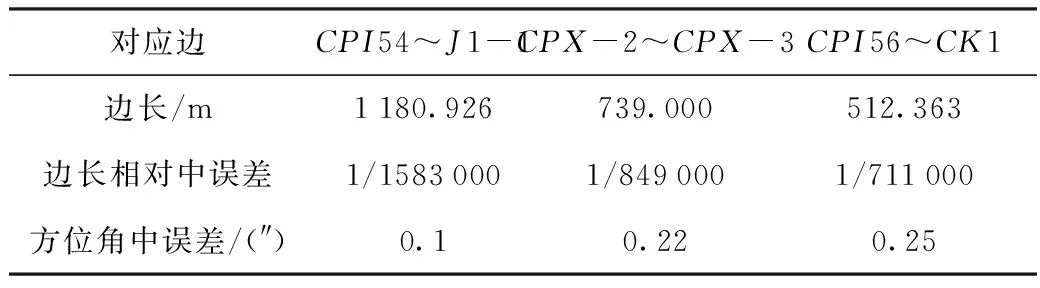
表11 進(jìn)洞定向邊精度統(tǒng)計(jì)
按規(guī)范[1]規(guī)定,洞外兩貫通面允許的橫向貫通中誤差限差均為±40 mm,利用公式(1)估算出進(jìn)口與斜井、斜井與出口的最大橫向貫通理論中誤差分別為±2.8 mm與±8.3 mm,從以上的最大橫向貫通中誤差估算結(jié)果可以看出,由天坪隧道GPS控制網(wǎng)引起的進(jìn)口與斜井、斜井與出口隧道橫向最大貫通誤差均優(yōu)于規(guī)范限差。本次建立的GPS隧道控制網(wǎng)精度較高,完全滿足該隧道施工要求。
5 結(jié)論
天坪隧道GPS建網(wǎng)在外業(yè)控制網(wǎng)的布設(shè)、測(cè)量方案的選取、內(nèi)業(yè)數(shù)據(jù)處理等各個(gè)方面精細(xì)控制,把控每一步細(xì)節(jié)來(lái)提高控制網(wǎng)精度,合理建網(wǎng),保障隧道施工。
高相對(duì)精度的GPS控制網(wǎng)保障了隧道洞外橫向貫通誤差,較小的洞外橫向貫通誤差給洞內(nèi)橫向貫通誤差預(yù)留了較大空間,為隧道的順利貫通打好了基礎(chǔ)。
[1] TB10601—2009高速鐵路工程測(cè)量規(guī)范[S]
[2] 國(guó)家測(cè)繪局.GB/T18314—2009全球定位系統(tǒng)(GPS)測(cè)量規(guī)范[S].北京:中國(guó)標(biāo)準(zhǔn)出版社,2009.
[3] 陳新煥.鐵路隧道GPS施工控制網(wǎng)的建立[J].鐵道勘察,1995(2)
[4] 王兵海.長(zhǎng)大曲線隧道GPS平面控制測(cè)量方法[J].鐵道勘察,2009(5):24-26
[5] 劉仁釗,劉延明.精密工程測(cè)量控制網(wǎng)的建立方法[J].科技創(chuàng)新導(dǎo)報(bào),2007(6)
[6] 楊友濤,劉成龍.北天山隧道施工GPS控制網(wǎng)的建立及其貫通誤差預(yù)計(jì)[J].四川測(cè)繪,2006(9)
[7] 李征航.實(shí)用GPS數(shù)據(jù)處理教程[M].武漢:武漢大學(xué)出版社,2009
[8] 魏二虎,黃勁松.GPS測(cè)量操作與數(shù)據(jù)處理[M].武漢:武漢大學(xué)出版社,2004
[9] 劉大杰,施一民,過(guò)靜珺.全球定位系統(tǒng)的原理與數(shù)據(jù)處理[M].上海:同濟(jì)大學(xué)出版社,2001
TheestablishofGPScontrolnetworkandtheestimateoftransfixionerrorfortheTianpingtunnelrailwayproject
LIU bin LV Hong-quan
2014-08-05
劉 斌(1987—),男,2010年畢業(yè)于長(zhǎng)安大學(xué)測(cè)繪工程專業(yè),助理工程師。
1672-7479(2014)05-0019-04
P228
: B
猜你喜歡
心理學(xué)報(bào)(2022年4期)2022-04-12 07:38:02
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
當(dāng)代化工研究(2016年9期)2016-03-20 16:22:13
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
西華師范大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年3期)2015-02-27 15:31:22
測(cè)繪科學(xué)與工程(2013年3期)2013-03-11 15:07:36
