超長跨海GPS三角高程傳遞
——以港珠澳大橋為例
2014-07-25 11:28:53閔陽
鐵道勘察 2014年2期
閔 陽
(中鐵第四勘察設計院集團有限公司,湖北武漢 430063)
超長跨海GPS三角高程傳遞
——以港珠澳大橋為例
閔 陽
(中鐵第四勘察設計院集團有限公司,湖北武漢 430063)
以港珠澳大橋高程控制網測設為例,介紹一種通過測量機器人實時記錄豎直角,以消除測量平臺不穩定性影響的GPS三角高程測量方法。
GPS 三角高程 跨海大橋 測量機器人
港珠澳大橋屬于G94珠三角環線高速的一部分,設計時速100~120 km,跨越珠江口伶仃洋海域,是連接香港、珠海及澳門的大型跨海通道,全長約50 km。主體工程“海中橋隧”長約36 km,成為世界最長的跨海大橋。港珠澳大橋首級控制網的測設是一個根據現場實際情況,結合已有測量理論和經驗,不斷自主創新和克服困難的過程。由于測量平臺的不穩定性,高程控制網的測設尤為困難。
1 GPS三角高程測量方法
GPS三角高程測量的基本思想是:根據GPS網的基線改平邊長和相應邊段上所觀測的豎直角,按三角公式計算各GPS點之間的高差,進而求得GPS點的高程。如果已知測段兩點間的水平距離D,顧及地球曲率和大氣折光的影響,則測段兩點間的單向觀測的高差計算為[1]
(1)
式中,k為大氣垂直折光系數;R為地球半徑;D為測段兩點間的水平距離。
2 測量實施
2.1 概況
港珠澳大橋橋梁工程前期完成三個試樁(K19、K27、K33)及K23埋置式承臺足尺模型工藝試驗后,將其改造為用于橋梁工程施工的測量平臺。四個測量平臺均位于橋軸線北側150 m處,其中K19、K27、K33三個測量平臺尺寸為 9.6 m×3.6 m,再加西島測量平臺,海上測量平臺共計5個。K19、K23、K27、K33及西島測量平臺上埋設強制對中觀測墩,與GNSS連續運行參考站系統(HZMB-CORS)的洋環站、野貍島站、虎山站、新小冷水形成控制網。具體分布如圖1所示。

圖1 港珠澳大橋測量平面示意
為了驗證基于GPS三角高程的超長跨海高程傳遞的可行性,本文以圖2所示控制網中的西島測量平臺至K19測量平臺為例,進行實測和論證。

圖2 測點編號示意
如圖2所示,本次測量的主要思路是通過GPS測出邊CE、CF、DE、DF的平面邊長后,通過測角精度為0.5″的測量機器人對豎直角進行對向觀測,結合同側C點至D點、E點至F點水準儀觀測高差,各組觀測數據的各項指標滿足規范[3]要求后,最終通過平差計算求得本測段的高差值。
2.2 水平距離測量
根據公式(1),水平距離D的觀測精度將直接影響最終高差成果的精度。為了保證水平距離D的觀測精度,本方案中前期已建立包含整個測區的4個連續運行參考站;另外各測量平臺上均澆筑一對便于GPS觀測和全站儀觀測的強制對中觀測立柱。GPS觀測按照《全球定位系統(GPS)測量規范》(GB/T18314—2009)中的B級要求執行,采用15臺GPS接收機和4個GNSS連續運行參考站系統同步觀測,基線處理采用Bernese 5.0進行,并使用精密星歷。網平差后最弱點平面點位中誤差優于1.8 mm,最弱邊邊長中誤差優于1.5 mm。
獲得各相鄰測量平臺上觀測點之間GPS基線長S后,通過改算獲得其對應的平面距離D。其計算公式為
(2)
式(2)中h′為按下式計算的高差近似值,即
(3)
式中,ΔH為測段兩點間的大地高差,ΔNEGM2008為根據EGM2008重力場模型計算的測段兩點間的大地水準面差值之差。
2.3 角度測量
港珠澳大橋橋梁工程各測量平臺是前期完成的試樁和埋置式承臺足尺模型工藝試驗后改造而成,其埋深各不相等。受潮汐、海風等外力的影響,各測量平臺的不間歇振動無法消除,只有研究出特定的測量方案消除這種由于潮汐、海風等外力影響帶來的振動。根據振動理論,一個處于平衡狀態的彈性系統,當受到某種干擾,破壞原來的平衡狀態后就將發生振動。另外通過對波浪力作用下四樁平臺結構力學性能的有限元分析[4],測量平臺的位移時程曲線符合簡諧振動理論的特征。為了進一步驗證測量平臺受潮汐、海風等外力影響引起的振動具有這樣的規律性,本項目中通過對高精度傾角儀LE-30的RS232接口編程,實現其實時垂直傾角測量的記錄。以其中一測量平臺為例,連續觀測其垂直傾角并實時記錄,共記錄觀測值3 000個。所有觀測值的平均值為2.6×10-10″,幾乎完全接近于垂直,各觀測值大小的分布情況如圖3所示。
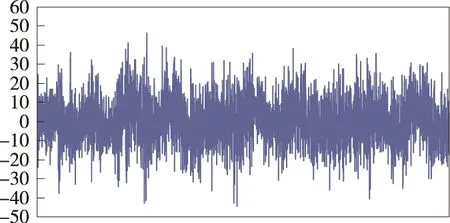
圖3 測量平臺豎直傾角變化(單位:″)
基于以上分析,為了滿足全站儀實時記錄垂直角的要求,本項目人員編制出基于串口連接電腦與全站儀,實現通過電腦程序控制全站儀測量的方式,實時測量并記錄垂直角觀測值,然后通過取平均消除潮汐、海浪、風力等造成測量平臺輕微擺動的影響,求得最終每組觀測數據的垂直角觀測值。
通過多次實測取證,在避免潮汐和潮流峰值的前提下,均選擇夜間平潮時段、風力微和時進行觀測,因此引起測量平臺晃動的主要原因為海浪。海浪是發生在海洋中的一種波動現象,其周期為0.5~25 s。每0.3 s記錄一個觀測值,每個角度半測回記錄觀測值150個,可以很好地消除測量平臺擺動對測量值的影響。
2.4 數據處理及驗證
本次外業共觀測68組,外業數據采集完成后,對所有觀測數據進行質量評估與分析,最終獲得48組合格觀測數據,其判定依據如下。
(1)單測回間跨海高差互差限差為
(4)
式中,MΔ為每千米水準測量偶然中誤差限值/mm;N為單測回的測回數;S為跨河視線長度/km。
(2)環閉合差限差為
(5)
式中,MW為每千米水準測量偶然中誤差限值/mm;S為跨河視線長度/km。
為了驗證本方法測量結果的正確性,監理方和施工方分別采用不同的測量方法,其中監理方采用GPS三角高程測量方法施測,施工方采用經緯儀傾角法施測。
根據規范要求,西島測量平臺至K19測量平臺需觀測48組雙測回數據,最終測量合格的48組雙測回的環閉合差值和各雙測回互差均滿足規范限差要求。并最終通過平差計算獲得圖2所示C→E和F→D的高差,其測量結果與經緯儀傾角法測量結果的較差如表1所示。由此可確認本文所述超長距離GPS三角高程測量方法切實可行,測量結果可靠。

表1 本文方法與經緯儀傾角法測量高差較差
3 結束語
在超長距離的跨海或跨河高程測量中,尋找一種可靠、快速、高精度的測量方法是必要的。本文通過理論和實例數據分析,以港珠澳大橋的超長跨河高程傳遞為例,通過采用連續觀測、自動記錄觀測數據的方法解決測量平臺受周期性外界因素的影響。通過GPS和高精度全站儀結合的方法實現了港珠澳大橋高程控制網的建立。此方法與海洋學潮位觀測法、經緯儀傾角法等方法相比,具有比較經濟、周期短、作業方便等優勢,不失為超長距離跨海或跨河高程測量一種有效可行的方法。
[1] 馮林剛,趙鵬全.GPS三角高程測量的方法及其應用[J].測繪通報,2006(4)
[2] 張艷.應用精密三角高程測量實現跨河水準的研究[J].合肥工業大學學報:自然科學版,2007(10):1345-1348
[3] GB/T12897—2006 國家一、二等水準測量規范[S]
[4] 居艮國,呂鳳梧.波浪力作用下四樁平臺結構力學性能的有限元分析[J].結構工程師,2012(2)
[5] 熊偉,吳迪軍.港珠澳大橋GNSS連續運行參考站系統的設計與建設[J].鐵道勘察,2013(3)
[6] 韓志國.計算機和全站儀數據通訊技術探討[J].軟件導刊,2008(3)
[7] 葛忠土.精密三角高程在大瑤山隧道二等水準測量中的應用[J].鐵道勘察,2009(1)
[8] 郭秉江,許提多.Leica TCA1800高精度超長跨海高程傳遞[J].鐵道勘察,2017(1)
[9] 韓菲,程傳錄,王小瑞.BERNESE 5.0軟件及其在高精度GPS數據處理中應用[J].測繪信息與工程,2011(4)
[10]譚長建.波浪效應下大跨度斜拉橋索橋耦合振動研究[D].成都:西南交通大學,2009
Very Long Cross-Sea Height Transmission Based on GPS Trigonometric Leveling——A Case Study of Hong Kong-Zhuhai-Macao Bridge Survey
MIN Yang
2014-01-22
閔 陽(1983—),男,2008年畢業于中國地質大學(武漢)大地測量學與測量工程專業,工學碩士,工程師。
1672-7479(2014)02-0028-03
P224.2;P228.4
: B
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
