壓電驅動撞針式微噴系統的鍵合圖建模
2014-08-07 12:16:58路士州劉亞欣姚玉峰孫立寧
西安交通大學學報 2014年1期
路士州,劉亞欣,2,姚玉峰,孫立寧
(1. 哈爾濱工業大學機器人技術與系統國家重點實驗室, 150001, 哈爾濱;2. 西安交通大學機械制造系統工程國家重點實驗室, 710049, 西安)
壓電驅動撞針式微噴系統的鍵合圖建模
路士州1,劉亞欣1,2,姚玉峰1,孫立寧1
(1. 哈爾濱工業大學機器人技術與系統國家重點實驗室, 150001, 哈爾濱;2. 西安交通大學機械制造系統工程國家重點實驗室, 710049, 西安)
為了快速、精確地分配微量高黏性液體,以及研究系統參數對分配過程的影響,設計了一種壓電驅動撞針式微噴系統,并構建了該系統的鍵合圖模型。將壓電致動器與撞針式微噴閥相結合,利用壓電致動器高頻振動來帶動撞針運動,以此對微量液體的高速、精確分配進行操作。通過耦合各能域變量及不同液路通道的鍵合圖圖元參數,以及整合機電模塊、液氣模塊的子鍵合圖模型,得到微噴系統的整體鍵合圖模型。仿真結果表明:液體噴射速度幅值與電壓信號幅值和頻率成正比例關系,噴射體積隨儲液筒上部氣壓升高而線性增加;液體流速與撞針振動速度成線性關系,這在難以直接測量流速的場合,可通過測量撞針振動速度來間接監測液體流速。實驗驗證了微噴系統鍵合圖模型及關鍵結論的正確性,研究成果能夠為微噴系統的結構設計、控制參數的優化提供理論指導。
高黏性;微噴;撞針式;鍵合圖;壓電致動器
在生命科學、電子封裝、快速制造等領域,經常需要快速、精確地分配轉移各類液體材料[1-3],尤其近幾年來,隨著各領域研究水平的提高,一些高黏性難分配的液體材料不斷成為實驗研究對象,使用的液體體積不斷減小到10×10-9L甚至10×10-12L級別,要求的分配速度越來越高[4-6]。這些都對微量液體的分配操作提出了更快速、精確、微量、適用性廣的要求。
撞針式微噴閥依靠撞針振動驅動液體噴射,具有驅動力大的特點,適合分配高黏度的液體材料[7]。目前,已商品化的撞針式微噴閥均依靠脈沖式空氣驅動撞針振動,由于空氣的壓縮性、換向閥門的遲滯性等嚴重限制了撞針運動精度和振動頻率的提高,因此也使液體分配精度和速度很難得到進一步提高[7-8]。
針對高黏性液體材料要求快速、精確、微量分配的需求,以及空氣脈沖驅動撞針式分配閥分配效率難以提高、液滴尺寸操控能力有限的問題,本文充分利用壓電致動器振動頻率高、輸出位移精確的特點,提出了一種壓電驅動撞針式微噴系統。該系統利用電信號激勵壓電致動器高頻振動,當撞針跟隨振動時通過端部擠壓以及外部氣壓的復合驅動,驅使部分黏性液體從噴嘴內高速噴出。
鍵合圖理論借助一整套二元符號和概念體系,能夠將各能域系統的理論、概念統一起來,并且具有直觀性好、信息含量豐富、數學關系嚴格的特點[9-10],因此非常適合對微噴系統的建模分析。在分析壓電驅動撞針式微噴系統的構成及工作原理的基礎上,本文先構建了液體在不同通道內的鍵合圖模型,并通過耦合各能域變量,來獲取整體鍵合圖模型及狀態方程;然后仿真研究了系統參數對噴射速度和液滴體積等分配指標的影響;最后,通過實驗驗證了微噴系統鍵合圖模型及關鍵結論的正確性。
1 壓電驅動撞針式微噴系統原理
如圖1a所示,壓電驅動撞針式微噴系統主要由壓電致動器、菱形放大機構、撞針、噴嘴和儲液筒組成。在電信號激勵下,壓電致動器沿橫向輸出相應的位移,菱形放大機構對位移量放大后帶動撞針沿豎直方向振動。儲液筒上部連接高壓氣源裝置,在高壓空氣驅動下,液體沿供液管道不斷擠入閥體液流通道內。
如圖1b所示,當撞針快速向下運動時,將擠壓基座區內的液體,驅使部分液體沿噴嘴高速噴出;當撞針向上運動時,將導致基座區壓力減小,促使噴嘴內液體與噴出液體斷流后回流到基座區,已噴出液體便以液滴形式分配到基板上;同時,回流區及上部液體在Ps作用下,將及時填充基座區空間。在具體分配操作中,電信號、氣壓、撞針運動、腔體結構等系統參數均會影響液體的噴射效果。
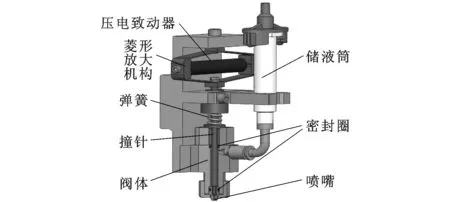
(a)微噴系統構成
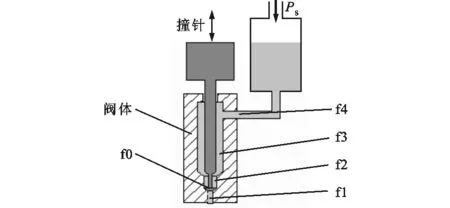
(b)液流通道示意圖f0:基座區;f1:噴嘴區;f2:回流區;f3:噴腔區;f4:供液管道;Ps:儲液筒上部氣壓
2 微噴系統的鍵合圖建模
由圖1b可知,f0、f1、f4相當于圓形通道,f2、f3相當于環形通道,在不同通道內,液流狀態差別很大,因此有必要研究不同通道內的液流鍵合圖模型。
2.1 不同通道內液體流動的鍵合圖模型
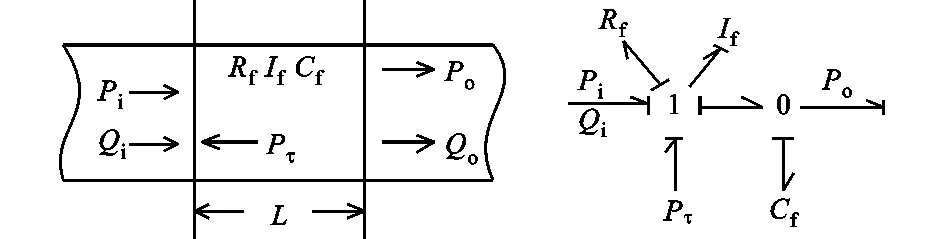
(a)結構示意圖 (b)鍵合圖模型Pi、Qi:入口處的壓力和流量;Po、Qo:出口處的壓力和流量;L:圓形通道的長度;Pτ:克服流體屈服應力而損失的壓力;Rf、If、Cf:液阻、液感、液容
如圖2所示,在壓力的作用下,液體沿圓形通道的流動過程受到黏滯力、壓縮性及自身慣性的作用,實際應用中,大部分液體材料都是非牛頓流體,而Bingham流體在表示非牛頓流體特性方面,應用最為廣泛[11]。液體在圓形通道內流動的鍵合圖模型如圖2b所示。鍵合圖模型的液阻、液容、液感表達式如下
(1)
Bingham流體的剪切力為
(2)
液體在通道內流動時克服Bingham流體屈服應力而損失的壓力為
Pτ=-8Lτy/3r
(3)

在f2、f3中,液流區域相當于環形通道(見圖3a),液體在環形通道內流動的鍵合圖模型如圖3b所示。流阻、流容、流感參數為
(4)
當液體流動時,為克服流體屈服應力,撞針運動與液體摩擦而損失的壓力為
(5)
式中:rn、ra分別為撞針半徑和通道半徑;Aa為環形通道的截面積;vn為撞針運動速度;C為阻尼系數,取值在2.0~3.07之間[7]。
(a)結構示意圖 (b)鍵合圖模型Pia、Qia:環形通道入口處壓力和流量;Poa、Qoa:環形通道出口處壓力和流量;La:環形通道的長度
2.2 微噴系統的鍵合圖模型
壓電驅動撞針式微噴系統是集機、電、液、氣于一體的多能域耦合系統,并且液流區域包含多段圓形和環形通道,鍵合圖按一定的規則將各能域變量耦合統一起來,構建的整體模型如圖4所示。
在圖4中,比例系數K1、K2和K3分別為
(6)
式中:Kp為壓電致動器剛度;xp為壓電系數;Lf2、Lf3分別為f2、f3的通道長度;rf2、rf3分別為f2、f3的通道半徑。在鍵合圖模型中,規定液體噴出方向為正方向,則電信號激勵壓電致動器橫向伸長并帶動撞針沿負方向運動。
由圖1可知,微噴系統利用菱形放大機構對壓電致動器位移進行放大,其放大倍數為[12]
β=1/tanθ
(7)
式中:θ為菱形放大機構斜壁梁與水平方向的夾角。
2.3 狀態方程的建立
選取具有積分因果關系的慣性和容性元件的廣義動量p13、p20、p22、p30、p38和廣義位移q2、q9、q15、q27、q34為狀態變量,選取V、Fn、Pτ1、Pτ2、Pτ3、Pτ4和Ps為輸入變量。具有積分因果關系的廣義矩陣為
X=[q2,q7,p13,q15,p22,q27,p30,q34,p38]T
設輸入矩陣
U=[V,Fn,Pτ1,Pτ2,Pτ3,Pτ4,Ps]T
則由因果關系和功率流方向可以列寫出相應的流方程和勢方程
(8)
(9)
(10)

(11)

(12)

(13)
(14)

(15)
(16)

V:激勵電信號;FV:壓電致動器受到的力;Rp、Rn:壓電致動器、撞針的阻尼系數;Me:壓電致動器等效質量,為實際質量的1/3;Mn:撞針的質量;Kp、Ks:壓電致動器、彈簧剛度系數;Fn:彈簧預壓力;An:撞針端部截面積;Rfi:通道的液阻,i=1~4;Ifi:通道的液感,i=0~4;Cfi:通道的液容,i=0,2,3;Pτi:克服Bingham流體屈服應力損失的壓力,i=1~4;Pv2、Pv3:通道f2、f3區克服撞針運動損失的壓力;1~39:功率鍵
(17)
在式(10)中,系數
(18)
式(8)~式(17)的矩陣形式為

(19)
式(19)即為微噴系統的狀態方程。
3 模型仿真分析研究
液體噴射速度和液滴體積是應用中最為關注的指標。本文基于系統狀態方程,在Matlab仿真環境下,研究了系統參數對分配速度和液滴體積的影響。用于仿真的模型參數如表1、表2所示。
表1 微噴系統的相關部件參數

表2 液流通道參數 mm
在微量液體應用領域,往往需要系統噴射一系列體積的液滴,圖5為從噴嘴端部噴出的液體體積Vd隨時間的變化情況。在條件①下,Ps=0 MPa,V=75+75sin(400πt-π/2),t為液體噴射時間;在條件②下,Ps=0.15 MPa,V=0;在條件③下,Ps=0.15 MPa,V=75+75sin(400πt-π/2)。
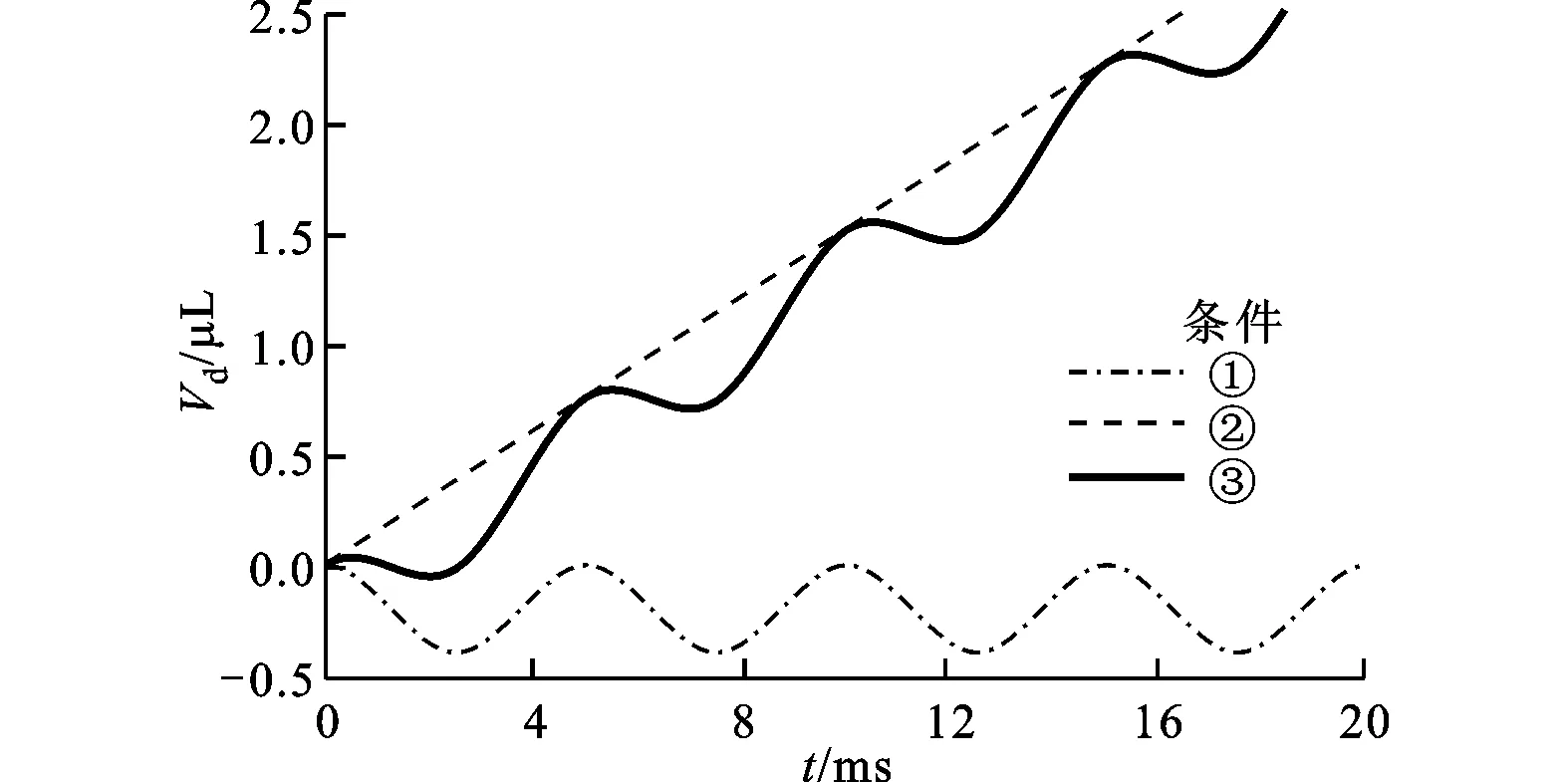
圖5 不同條件下的液體噴射體積
由圖5可知:在條件①下,單位周期內流入、流出基座區的液體體積相同,導致從噴嘴端部實際噴出的體積為0;在條件②下,從噴嘴端部噴出的液體體積隨時間線性增加,但單位周期內的體積增量與條件③時相同;在條件③下,流入噴嘴的體積大于回流體積,其體積差即為實際噴出的液滴體積。由以上現象可知,在系統尺寸確定的情況下,通過調控V、Ps可以調整液體流入和流出基座區的液體體積,而在單位周期內從噴嘴端部噴出的液體體積與在Ps驅動下的射流體積相同。
當僅在Ps驅動下時,噴嘴處的流量為

(20)
在一個噴射周期T內噴出的液體體積為

(21)
式(21)即為壓電驅動撞針式微噴系統噴射的液滴體積公式。液體噴射速度v對液滴的形成和脫離過程影響很大,只有在合適的噴射和回流速度范圍內,才能形成液滴噴射[13-15]。
圖6為在V=75+75sin(400πt-π/2)和不同Ps條件下液體噴射速度隨時間的變化情況。在圖6中,當流速小于0時,為回流速度,反之為噴射速度。由圖6可知,當氣壓為0時,液體回流速度幅值和噴射速度幅值相同,導致單位周期內實際噴射體積為0。隨著Ps的增大,液體回流速度不斷減小,噴射速度相應增大,因此氣壓Ps是調控速度偏移程度的重要參數。

Δv1、Δv2:偏移速度
噴射速度均值的偏移量
Δv=Q/Af1
(22)
式中:Af1為噴嘴截面積。當Ps=0 MPa時,不同電信號的幅值、頻率對撞針振動速度、液體流速幅值的影響見表3。由表3可知,流速幅值vb與電信號幅值、頻率成正比例關系,液體流速與撞針振動速度va成線性關系。
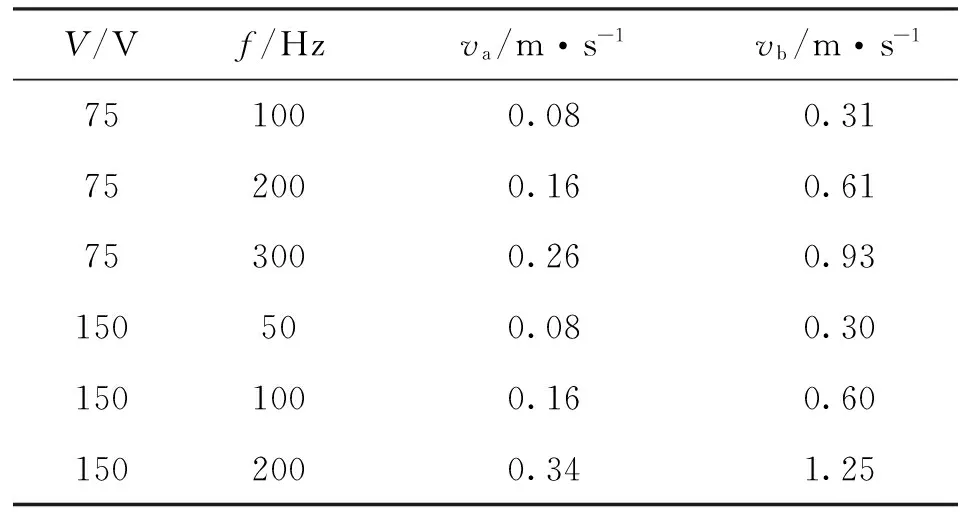
表3 電信號對分配過程的影響
4 實驗驗證
利用已搭建的壓電驅動撞針式微噴系統進行微量液體分配實驗,實驗中用精密天平秤提取噴出的液體質量,并根據密度轉換為液滴體積。圖7的實驗條件為:V=50+50sin(40πt-π/2),Ps=0.012 MPa,其他參數按表1、表2設置。可見,仿真與實驗結果的一致性較好,表明微噴系統鍵合圖模型能夠對液體噴射過程進行較為準確的模擬。

圖7 噴出液體體積隨時間變化的仿真和實驗結果
由式(20)、式(21)可知,液體質量與氣壓呈正比例關系。圖8的實驗條件為:V=50+50sin(40πt-π/2),其他參數按表1、表2設置。由圖8可知,實際噴射液體質量隨著Ps的升高而呈線性增大,與仿真結果相符。

圖8 液體體積隨Ps變化的仿真和實驗結果
5 結 論
本文將壓電致動器與傳統撞針式微噴閥相結合,并利用菱形放大機構對壓電致動器振幅進行放大,設計了一種具有高速、精確、微量分配特點的壓電驅動撞針式微噴系統。根據鍵合圖理論,通過耦合不同液路通道的圖元參數,以及整合機電模塊、液氣模塊的子鍵合圖模型,得到了微噴系統整體鍵合圖模型。利用該模型和搭建的微噴系統實驗平臺進行仿真和實驗研究,結果表明:本文建立的模型正確,能夠用于模擬微噴過程;液體噴射速度幅值與電信號幅值、頻率成正比例關系,噴射體積隨儲液筒上部氣壓升高而線性增加;液體流速與撞針振動速度成線性關系,在不能直接測量流速的場合,為通過間接手段監測流速提供了途徑。
[1] MACARRON R, HERTZBERG R P. Design and implementation of high throughput screening assays [J]. Molecular Biotechnology, 2011, 47(3): 170-285.
[2] KONG Fanwei, YUAN Liang, ZHENG Y F, et al. Automatic liquid handling for life sciences: a critical review of the current state-of-the-art [C]∥IEEE International Conference on Robotics and Biomimetics. Piscataway, NJ, USA: IEEE, 2009: 480-486.
[3] CALVACHE L C P, MORA F A R, DIANA N, et al. Manufacture and characterization of a mixture of bone power and bioceramic: a 3D-printing method process [J]. Universidad Del Norte, 2009, 26: 22-36.
[4] LIU Yaxin, YAO Yufeng, CHEN Liguo. Robotic liquid handling system for microdispensing of highly viscous reagent [C]∥Third International Conference on Measuring Technology and Mechatronics Automation. Piscataway, NJ, USA: IEEE, 2011: 171-174.
[5] MASAMI U, TOMOMI S, TOSHISHIGE S, et al. Novel packaging technology for microelectromechanical-system devices [J]. Japanese Journal of Applied Physics: Part 1 Regular Papers and Short Notes and Review Papers, 2005, 44(11): 8177-8181.
[6] KAZUYA K, OHMI F. A development of dispenser for high-viscosity liquid and pick and place of micro objects using capillary force [J]. Key Engineering Materials, 2012, 516: 48-53.
[7] NGUYEN Q H, CHOI S B. Performance evaluation of a high-speed jetting dispenser actuated by a ring-typed piezostack [J]. Proceedings of the Institution of Mechanical Engineers: Part C Journal of Mechanical Engineering Science, 2009, 223(6): 1401-1413.
[8] NGUON B, JOUANEH M. Design and characterization of a precision fluid dispensing valve [J]. International Journal of Advanced Manufacturing Technology, 2004, 24(1/2/3/4): 251-260.
[9] 劉旸, 江平宇, 劉崢. 基于微元件鍵合圖庫的微機電系統動態建模與仿真 [J]. 西安交通大學學報, 2005, 39(7): 744-748. LIU Yang, JIANG Pingyu, LIU Zheng. Dynamic system modeling and simulation using bond graph based micro components library for micro electro mechanical systems [J]. Journal of Xi’an Jiaotong University, 2005, 39(7): 744-748.
[10]王艾倫, 劉云. 復雜機電系統動力學相似分析的鍵合圖法 [J]. 機械工程學報, 2010, 46(1): 74-78. WANG Ailun, LIU Yun. Bong graph method for the dynamic similarity analysis of complex electromechanical system [J]. Journal of Mechanical Engineering, 2010, 46(1): 74-78.
[11]CHEN X B. Modeling and control of fluid dispensing processes: a state of the art review [J]. International Journal of Advanced Manufacturing Technology, 2009, 43(1/2/3/4): 276-286.
[12]徐志科, 鄢珂, 金龍. 一種正交型壓電位移放大機構的研究 [J]. 壓電與聲光, 2009, 31(2): 207-212. XU Zhike, YAN Ke, JIN Long. Research of orthogonal micro displacement amplifier with piezoelectric actuator [J]. Piezoelectrics and Acoustooptics, 2009, 31(2): 207-212.
[13]KOLTAY P, ZENGERLE R. Non-contact nanoliter and picoliter liquid dispensing [C]∥IEEE International Conference on Solid-State Sensors, Actuators and Microsystems. Piscataway, NJ, USA: IEEE, 2007: 165-170.
[14]李楊, 齊樂華, 羅俊, 等. 金屬熔滴氣動按需噴射特性試驗研究 [J]. 西安交通大學學報, 2011, 45(5): 69-73. LI Yang, QI Lehua, LUO Jun, et al. Experimental study on characteristics of molten metal pneumatic drop-on-demand ejection [J]. Journal of Xi’an Jiaotong University, 2011, 45(5): 69-73.
[15]YAO Yufeng, LU Shizhou, LIU Yaxin. Numerical simulation of droplet formation in contact micro-liquid dispensing [C]∥Third International Conference on Measuring Technology and Mechatronics Automation. Piscataway, NJ, USA: IEEE, 2011: 709-712.
(編輯 管詠梅)
BondGraphModelingofNeedleTypedJetDispensingSystemDrivenbyPiezoelectricActuator
LU Shizhou1,LIU Yaxin1,2,YAO Yufeng1,SUN Lining1
(1. Robot Research Institute, Harbin Institute of Technology, Harbin 150001, China; 2. State Key Laboratory for Manufacturing Systems Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
To dispense high viscosity micro-droplets accurately and speedily, and investigate the dispensing effects affected by system parameters, a kind of needle typed jet dispensing system driven by piezoelectric actuator is designed, whose bond graph model is also constructed. Combining piezoelectric actuator and needle typed jet dispenser, the system utilizes the piezoelectric actuator to vibrate the needle, which drives the droplets squirt from the nozzle. The system model validated experimentally is obtained by coupling variables from different energy fields, and sub-models of electrical and liquid-gas parts constructed following bond graph parameters in different dispensing channels. The simulations show that the jetting speed and volume depend on the drive voltage and gas-pressure linearly. And the dispensing speed also linearly relates to the needle vibration speed, and it means that the dispensing speed can be monitored indirectly by testing needle vibration.
high viscosity; jet dispensing; needle typed; bond graph; piezoelectric actuator
10.7652/xjtuxb201401023
2013-05-09。 作者簡介: 路士州(1986—),男,博士生;劉亞欣(通信作者),女,講師。 基金項目: 國家自然科學基金資助項目(51105116);西安交通大學機械制造系統工程國家重點實驗室資助項目(2011004)。
TP24;TP6
:A
:0253-987X(2014)01-0133-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19