RLV末端能量管理段混合制導方案
2014-08-09 22:11:48司馬駿黃一敏
航天控制 2014年1期
關鍵詞:控制策略
司馬駿 黃一敏
南京航空航天大學,南京 210000
?
RLV末端能量管理段混合制導方案
司馬駿 黃一敏
南京航空航天大學,南京 210000
提出了一種重復使用運載器(RLV)末端能量管理段的混合制導方案,以解決傳統制導方案實現過于復雜的問題。在超音速飛行階段,RLV飛行包線大,混合制導方案采用動壓控制策略代替傳統制導方案的高度控制策略,使得制導對軌跡剖面要求更少,軌跡參數計算量更小,控制結構也更加簡單,從而大大簡化了能量管理段的制導;在亞音速飛行階段,RLV飛行包線小,混合制導方案采用與傳統制導方案一致的高度/速度控制策略,其控制效果好,同時滿足亞音速飛行階段對飛行器高度、空速精確控制的要求。仿真結果表明,混合制導方案是可行的。
重復使用運載器;能量管理;混合制導;動壓控制策略
重復使用運載器[1](Reusable Launch Vehicle, 簡稱RLV)末端能量管理段(Terminal Area Energy Management,簡稱TAEM)的任務是管理其初期再入段結束時的能量(馬赫數約為2.5,高度約為25km),引導飛行器進入自動著陸段窗口(馬赫數約為0.5,高度約為3km)。
RLV能量管理段傳統的制導方案為高度/速度控制方案[2-3],文獻[2-3]指出高度控制通過法向過載控制實現,而速度控制通過減速板控制(Speedbrake,簡稱SB)實現。在TAEM超音速飛行階段,由于減速板強度限制,減速板不能用于控制,制導僅通過法向過載控制來跟蹤高度、約束動壓與總能量,其實現復雜,對軌跡剖面參數要求多,控制參數計算量大。進入亞音速飛行階段,傳統方案采用分別控制RLV高度與速度的策略,實現對總能量的控制,并保證飛行器高度、速度、軌跡傾斜角等滿足著陸段窗口要求。
為了簡化TAEM制導方案,同時保證制導性能要求,本文提出了一種混合制導方案,在超音速飛行階段采用動壓控制策略[4]代替傳統的高度控制策略[3],通過法向過載控制來控制動壓,并通過調整動壓約束總能量,動壓控制結構簡單,對軌跡剖面參數要求更少,控制參數計算量更小。進入亞音速飛行階段,混合制導保持傳統方案的高度/速度控制策略[3],以滿足亞音速飛行范圍對飛行器高度、速度等狀態的精確控制要求。
1 TAEM制導概述
TAEM飛行地軌跡如圖1所示。
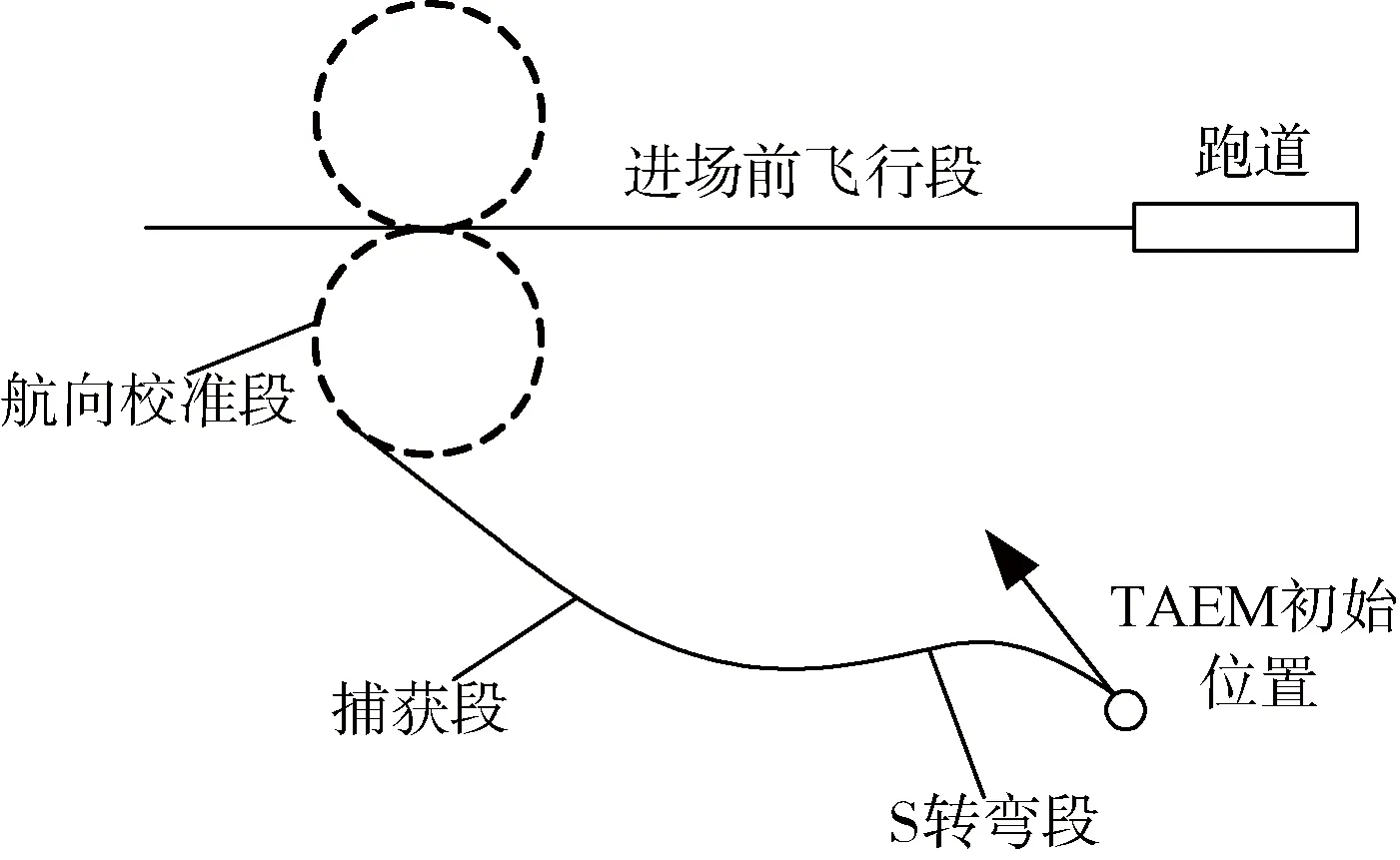
圖1 TAEM飛行地軌跡
RLV進入末端能量管理段后,首先捕獲安置在跑道一側的圓柱切向飛行,直至接近圓柱并跟蹤圓弧航跡飛行進入跑道,最終跟蹤跑道中心線下滑,進入著陸段。根據飛行地軌跡可將TAEM分為4個階段:S轉彎段、捕獲段、航向校準段和進場前飛行段。
TAEM制導可分為橫側向制導與縱向制導。橫側向制導目的是通過控制滾轉角跟蹤預定的地軌跡飛行,而縱向制導則通過控制能量跟蹤下滑軌跡剖面。本文重點在于分析TAEM縱向制導方案,即對能量的控制策略。
RLV能量管理段無動力下滑時能量由勢能和動能兩部分組成,其總能量E為:

其中,V為RLV慣性速度,H為高度,m為飛行器質量,g為重力加速度。假設RLV的重量為W=mg,定義能量重量比E/W為:

TAEM制導中能量控制的目標在于控制下滑飛行過程中的能量消耗,以跟蹤預定的軌跡剖面飛行,并最終捕獲下滑軌跡剖面,使得飛行器末端高度、速度等狀態滿足著陸段窗口要求[1]。能量控制主要是通過法向過載(與迎角直接相關)控制和減速板控制實現,但在超音速飛行階段,由于減速板強度限制,不能使用減速板,制導僅使用法向過載作為控制量,其制導控制效率較低,無法精確控制能量、高度與速度。進入亞音速飛行階段,制導可同時使用法向過載與減速板作為控制量,大大增加了制導控制效率,從而可精確控制飛行器高度、速度等狀態。
文獻[2-3]指出傳統制導方案應用于航天飛機的能量管理段,具有良好的控制效果。但在超音速飛行階段,傳統制導方案的高度控制策略過于復雜,主要體現為以下2點:
1) 傳統方案要求制導提供動壓剖面、高度剖面、能量剖面以及能量約束上下邊界,其需要的軌跡剖面多,軌跡參數計算量大;
2) 傳統方案通過法向過載控制來控制高度,跟蹤高度剖面,同時法向過載控制還用于約束能量與動壓在安全飛行范圍內。制導需分別設計高度控制器、能量約束控制器[3]與動壓約束控制器[3],其制導控制結構復雜,控制參數計算多。
而TAEM亞音速飛行馬赫數變化范圍約為0.8至0.5,RLV飛行包線小,涉及軌跡剖面參數少,傳統制導方案采用高度/速度控制策略,通過分別控制飛行器高度(能量勢能部分)與空速(能量動能部分),間接實現對總能量的控制,同時也適應著陸段窗口對飛行器高度、空速的嚴格約束。此外,通過法向過載控制來控制高度,以及減速板控制來控制飛行器空速(或動壓),都被證明有良好的控制效果。
2 混合制導方案
混合制導方案在超音速飛行階段采用動壓控制策略,通過法向過載控制來控制動壓,跟蹤動壓剖面,并通過調整動壓控制指令來約束總能量。進入亞音速飛行階段,混合制導方案保持傳統的高度/速度控制策略,通過法向過載控制RLV飛行高度,跟蹤高度剖面,而減速板用于控制RLV動壓(等效于控制空速)跟蹤動壓剖面。
2.1 動壓控制策略
當沒有風影響時,飛行器空速等于慣性速度,此時根據空速與動壓的關系,可推導有:
由上式可知,能量可分為動壓與高度兩部分。在超音速飛行階段,制導僅使用法向過載作為控制量,目標在于初步調整能量,約束能量、動壓、高度與空速在合理范圍內。動壓控制策略即控制能量的動壓部分,動壓與RLV空速、高度同時相關,控制動壓可以實現初步調整能量的制導要求。
超音速飛行范圍內,RLV高度從約25km下降至約12km,而馬赫數從約2.5減至0.8,其高度與速度變化范圍大。而動壓同時與RLV高度、速度相關,隨著高度的降低,飛行速度減小,而大氣密度增大,使得動壓的變化變慢,且動壓變化范圍小。圖2給出了典型的動壓剖面。
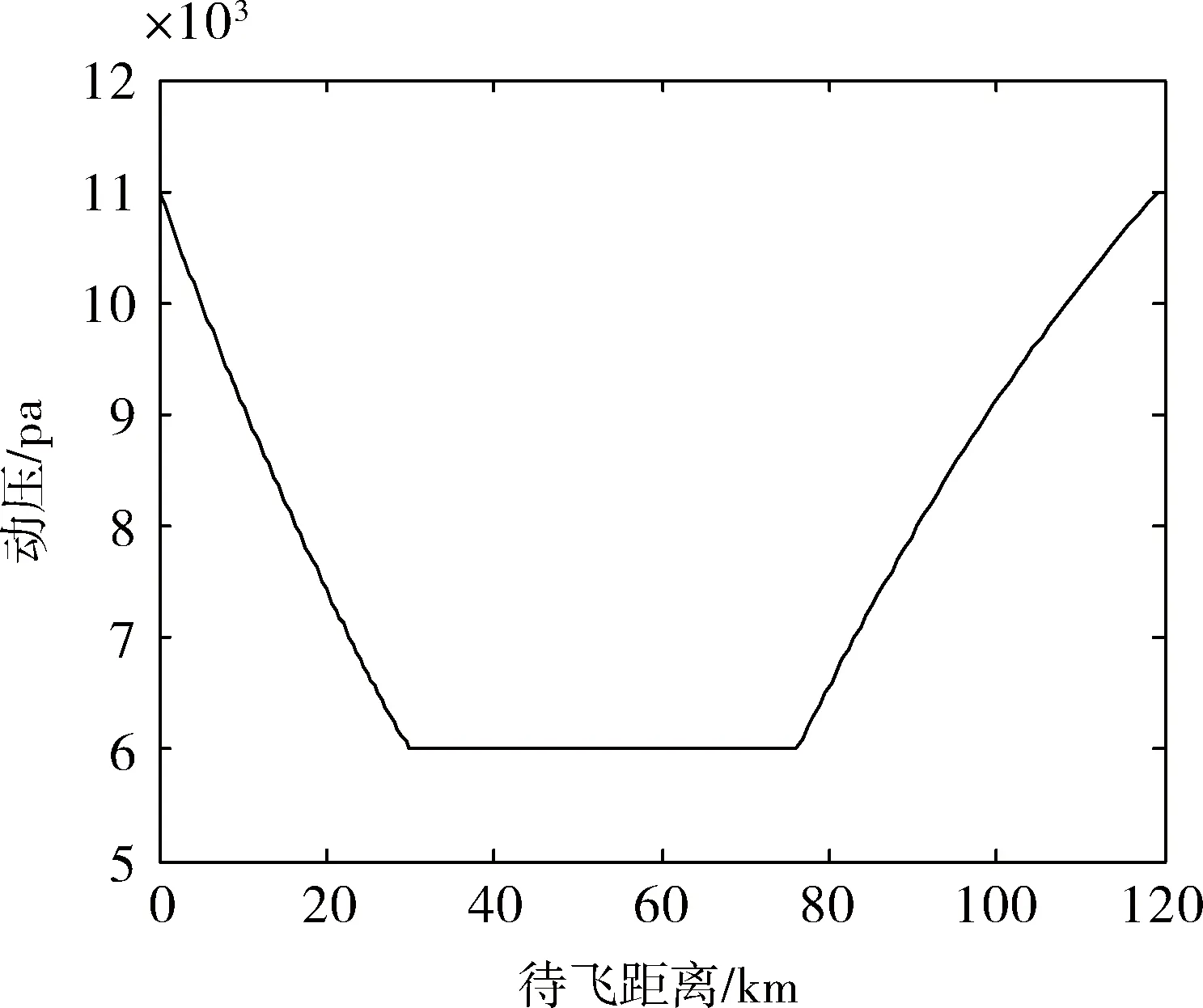
圖2 典型動壓剖面
圖2所示動壓剖面中待飛距離定義為TAEM下滑飛行剩余的地軌跡長度,動壓隨待飛距離變化呈近似線性變化。所以,在超音速飛行階段,控制動壓跟蹤動壓剖面實現簡單。
根據質點動力學,動壓的變化率滿足下式:
而在平衡狀態時可證明動壓滿足:

由上式可知,動壓變化率與飛行器空速、大氣密度相關,所以,動壓是一個緩慢的變化量,動壓控制回路可以增加飛行器長周期阻尼,并且可以使拐彎時航跡控制效果更好。

其中,V為RLV慣性速度,γ為航跡傾斜角,dR為單位時間內飛行距離。根據飛行器質點動力學方程,可有:

由上式可知,若TAEM飛行過程中動壓越大,則阻力越大,并使下滑軌跡更陡(γ負的越大),從而使能量梯度越大。調整動壓高于或低于標稱動壓,使能量消耗變快或變慢,從而約束總能量在合理偏差范圍內。動壓是一個緩慢變化量,調整動壓無法精確控制能量,但可以消除較大的能量偏差,符合TAEM超音速飛行階段的制導要求。
動壓控制是通過法向過載控制實現,動壓控制回路如圖3所示。
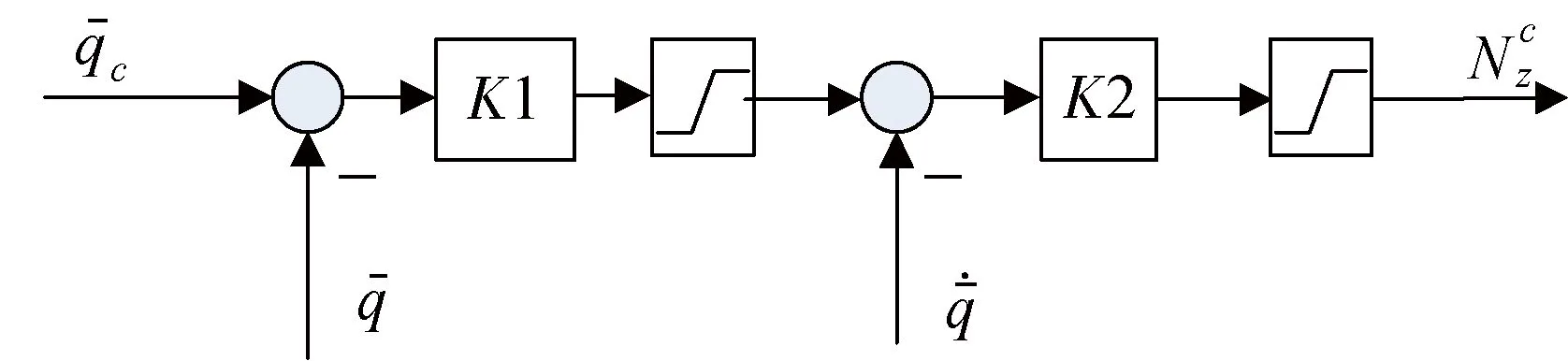
圖3 動壓控制回路
為了約束飛行器總能量,動壓指令計算為:
|E/Wc-E/W|>1000m:
|E/Wc-E/W|≤1000m:
2.2 高度/速度控制策略
進入亞音速飛行范圍,制導目標在于捕獲下滑軌跡剖面,精確控制飛行器高度、空速(或動壓)等狀態,以滿足著陸段窗口要求。文獻[1-4]中均指出高度/速度控制策略被證明有良好控制效果。
高度控制通過法向過載控制實現,其控制回路如圖4所示。
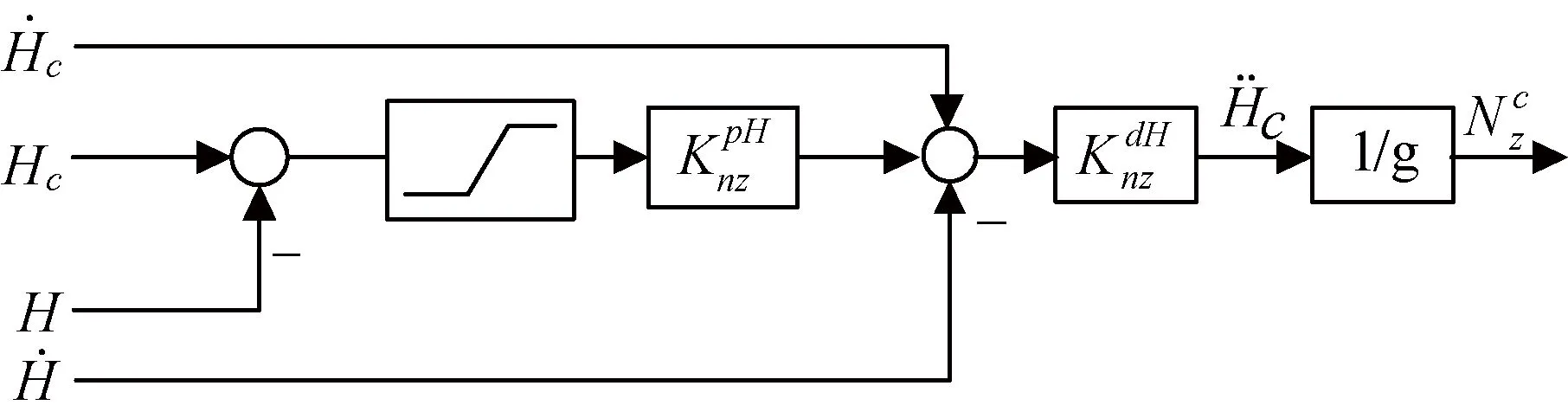
圖4 高度控制回路
高度控制制導律為:


3 混合制導仿真
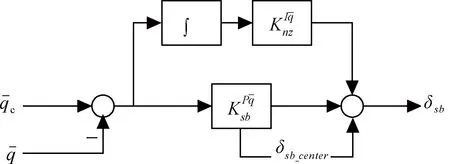
圖5 減速板控制動壓結構圖
TAEM制導目標是跟蹤標稱軌跡飛行,最終捕獲下滑軌跡剖面,安全進入跑道著陸范圍。評價TAEM制導性能主要考慮RLV飛行能力與TAEM安全飛行范圍。TAEM初始位置、航向的不確定性以及縱向風(順風或逆風)是影響制導性能的2個重要因素,即在TAEM初始狀態存在很大不確定性及可能遭遇縱向風影響情況下,制導系統是否能引導飛行器安全進入著陸段。針對本文提出的混合制導方案,在考慮初始位置、航向的不確定性與風的影響情況下進行TAEM制導仿真驗證。
表1給出了考慮不同航向、位置與縱向風影響下的仿真初始條件。其中,Ψ為航向角,X為RLV相對跑道縱向距離,Y為相對跑道側向距離,Vw為縱向風速,TW代表順風飛行,HW代表逆風飛行。
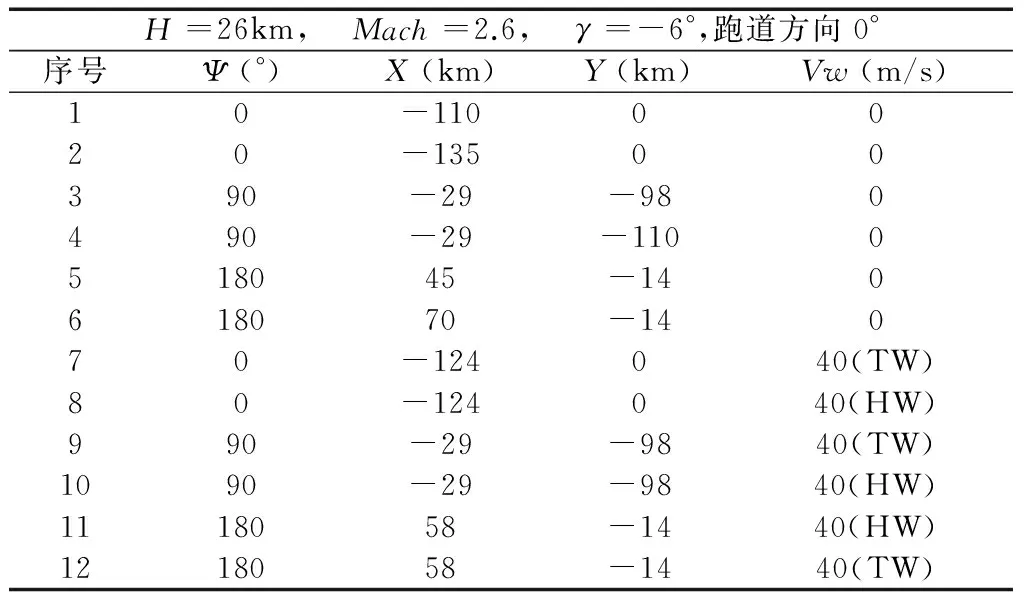
表1 制導仿真初始條件
表2給出了超音速飛行階段制導末端狀態與理想軌跡狀態的仿真誤差。
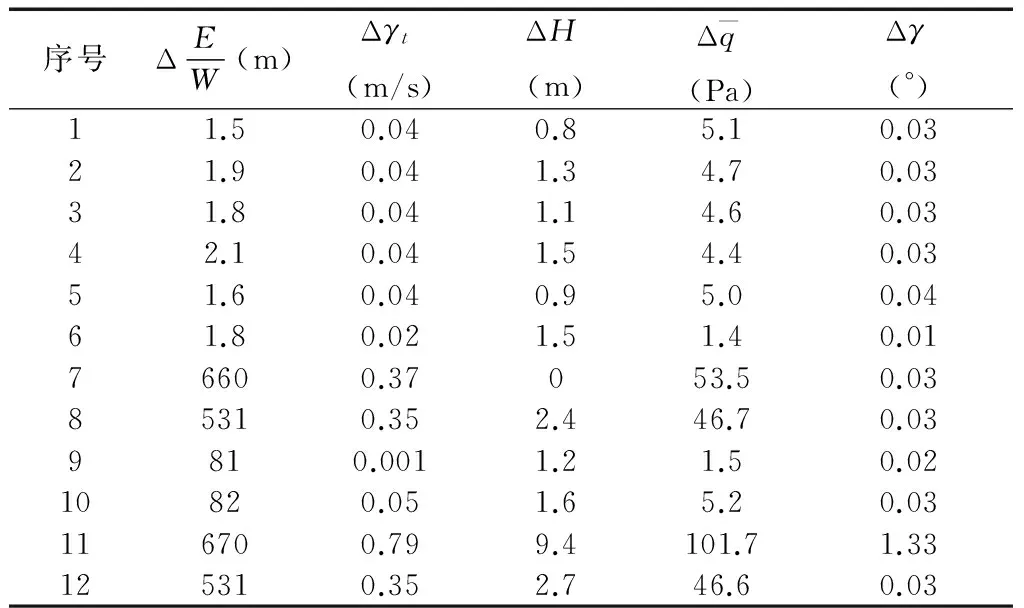
表2 制導仿真誤差

序號1~6的仿真沒有考慮風的影響,此時飛行器各個狀態量與標稱狀態量誤差很小,滿足制導性能要求。序號7~10的仿真考慮了風的影響,此時飛行器高度、空速與動壓誤差很小,而能量誤差較大,這是因為能量與慣性速度相關而不是空速,當有風時,空速與慣性速度不相等,制導系統為了控制空速,必須損失慣性速度來補償風的影響,即損失動能,這也使能量存在一定偏差,所以仿真結果同樣滿足制導性能要求。
圖6給出了動壓、高度、空速與能量的隨飛行距離變化仿真曲線,圖7給出了迎角變化曲線。
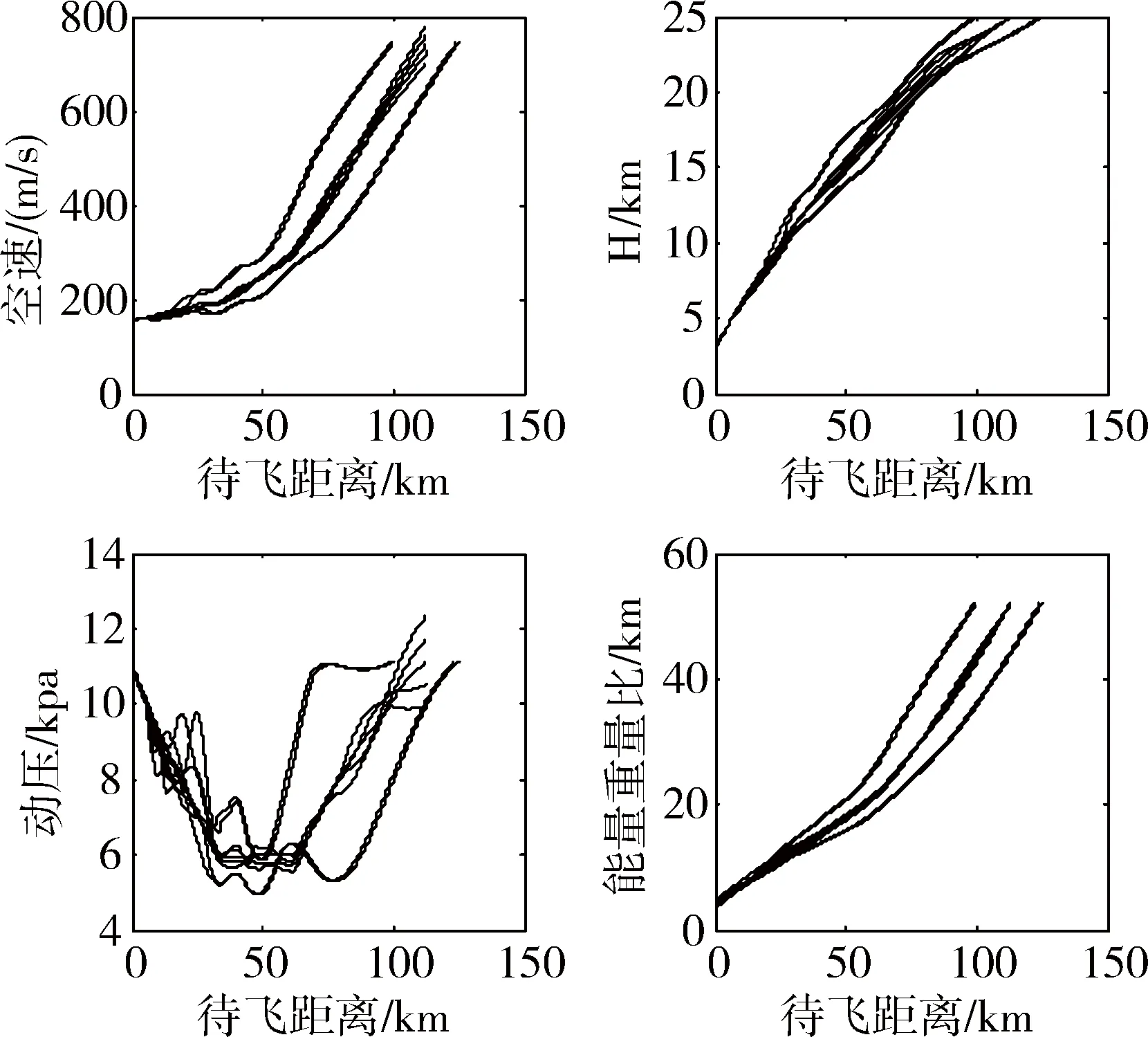
圖6 仿真狀態變化曲線
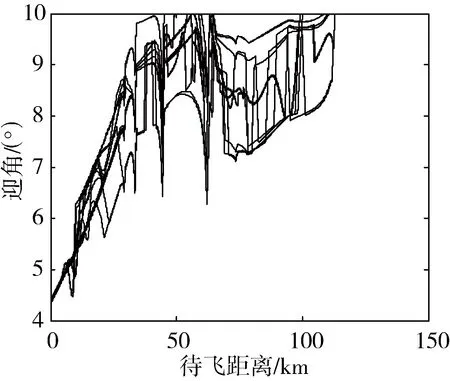
圖7 迎角變化曲線
從上述仿真曲線可知,TAEM飛行過程中RLV的能量、動壓、高度等狀態變化均在安全范圍內,且高度、空速、軌跡傾斜角末端狀態均滿足TAEM末端窗口要求。
圖8給出了一組典型的軌跡跟蹤曲線,包括空速、高度、動壓與能量,圖9給出了相應的迎角變化曲線。其中,實線為實際狀態隨時間變化,虛線為軌跡狀態隨時間變化。
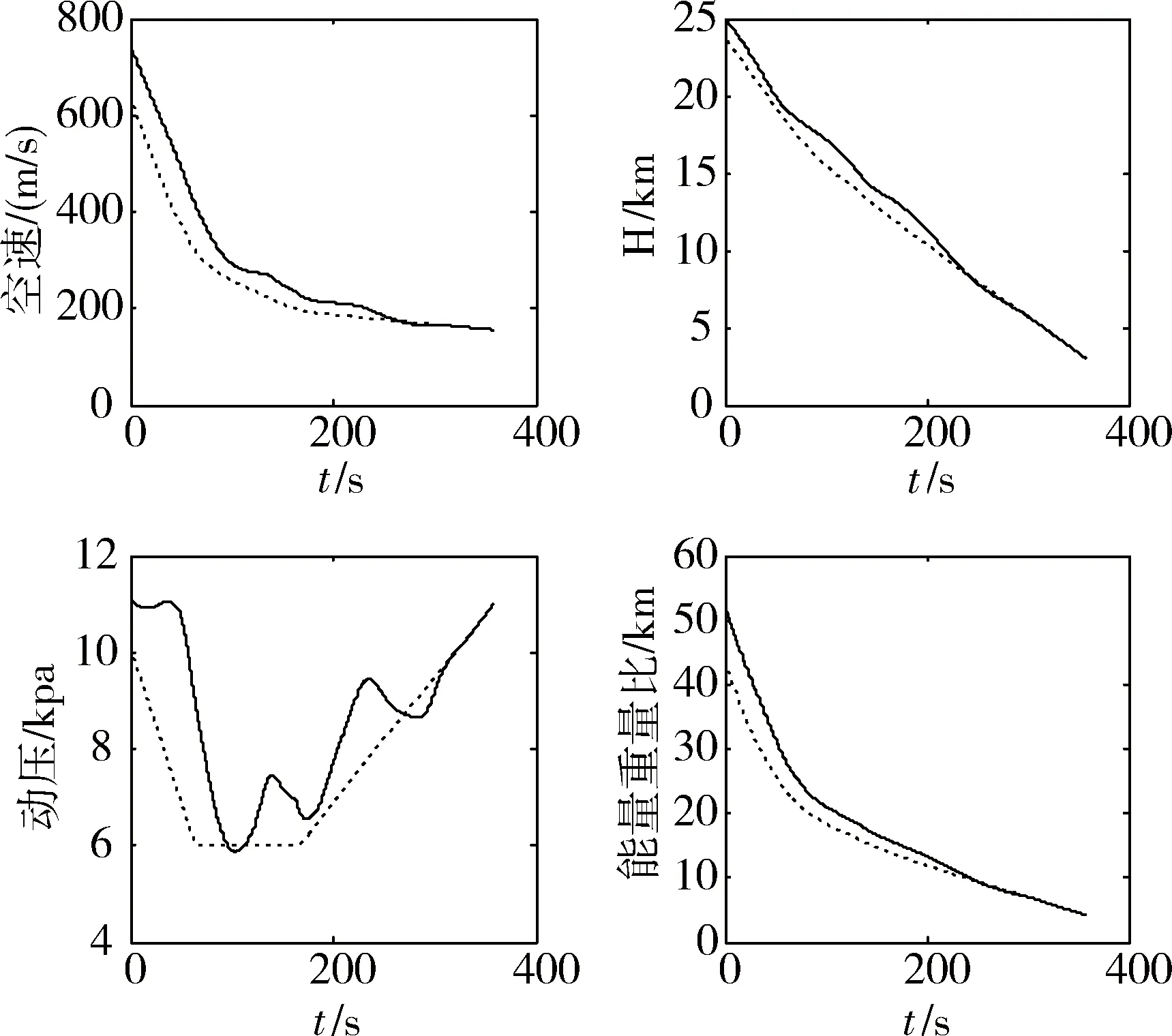
圖8 典型跟蹤曲線
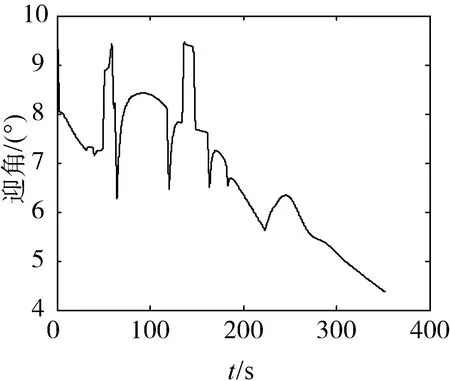
圖9 迎角變化曲線
上述仿真跟蹤曲線表明在初始能量、動壓、高度與速度存在較大偏差情況下,超音速階段能量、動壓、高度與速度狀態被控制在較小偏差范圍內,進入了亞音速飛行階段,各個狀態快速跟蹤上軌跡剖面。
以上仿真與分析結果證明了TAEM混合制導方案是可行的。在超音速飛行階段,相比傳統的高度控制策略,混合制導采用的動壓控制策略更加簡單,具體體現為:
1) 超音速階段RLV飛行包線大,涉及軌跡參數多,動壓控制策略要求更少的軌跡剖面,只需制導提供動壓剖面與能量剖面,其軌跡參數計算量也更小,從而大大簡化了制導對軌跡的要求;
2) 超音速飛行范圍制導僅使用法向過載作為控制量,控制能力小。法向過載直接應用于控制動壓,通過動壓指令限幅可直接實現對動壓的約束,也即約束舵面鉸鏈力矩,而能量約束則只需通過調整動壓指令實現,其制導結構更加簡單。
在亞音速飛行階段,RLV飛行包線小,涉及軌跡參數少,且制導控制能力強,可同時控制飛行器高度與動壓(或空速),此時混合制導采用傳統的高度/速度控制策略的控制效果好,同時可保證飛行器高度、空速滿足著陸段窗口要求。
4 結論
兼顧TAEM制導簡單性與制導性能要求,提出了一種混合制導方案,即超音速飛行階段采用動壓控制策略替代傳統方案的高度控制策略,制導實現更簡單,大大簡化了TAEM制導。而亞音速飛行階段保持傳統方案的高度/速度控制策略,控制效果好,可同時實現對總能量的控制并且保證著陸段窗口對飛行器高度、空速等狀態的嚴格約束。并通過制導仿真驗證了混合制導方案的可行性。
在后續研究工作中,需進一步完善混合制導方案的動壓控制策略,文獻[2-3]指出法向過載并不是一個好的控制量,如何選取一個與動壓聯系更緊密的控制量是關鍵。
[1] 孫春貞.重復使用運載器末端區域能量管理與無動力自動著陸技術研究[D].南京:南京航空航天大學,2008.
[2] 楊一棟.空間再入返回制導與控制[M].北京:國防工業出版社,2006:161-197.
[3] Thomas E Moore.Space Shuttle Entry Terminal Area Energy Management [M].Houston:NASA Johnson Space Center,1991.
[4] Ehlers H L, Kraemer J W.Shuttle Orbiter Guidance Systerm for the Terminal Flight Phase [J].Automatic,1997:11-21.
[5] Garman Golbert L,Montez Moises N.Shuttle TAEM Guidance and Flight Control [M].Houston:NASA,1991.
[6] Grubler A C.New Methodologies for Onboard Generation of Terminal Area Energy Management Trrajectories for Autonomous Reusable Launch Vehiclesm[D].Massachusetls:MIT, 2001.
A Mixed Guidance Method for Terminal Area Energy Management of RLV
SIMA Jun HUANG Yimin
Nanjing University of Aeronautics and Astronautics, Nanjing 210000, China
Amixedguidancemethodforterminalareaenergymanagement(TAEM)ofreusablelaunchvehicle(RLV)tosimplifythetraditionaryguidancemethod.DuringtheTAEMsupersonicflightphase,withwideflightenvelop,themixedguidancemethodadoptsdynamicpressurecontrolinsteadofthetraditionaryattitudecontrol.ThedynamicpressurecontrolmethodnotonlyrequireslessTAEMtrajectoriesandparametercalculation,butalsomakestheguidanceloopsimpler,whichgreatlysimplifiestheguidancesystemforTAEM.Duringthesubsonicflightphase,withnarrowflightenvelop,themixedguidancemethodadoptsthesameattitude/speedcontrolwithtraditionaryguidancemethod,whilethetraditionarymethodisdemonstratedtoproducegoodperformanceandmeetthestrictrequirementsofattitudeandairspeedinsubsonicflightphase.Furthermore,themixedguidancemethodisproventobeusefulbytestingwithcomputersimulation.
RLV;Energymanagement;Mixedguidance;Dynamicpressurecontrol
2013-08-16
司馬駿(1990-),男,安徽宿松人,碩士研究生,主要研究方向為無人飛行器控制技術;黃一敏(1969-),男,南京人,研究員,主要研究方向為無人機飛行控制技術、直升機飛行控制技術等。
V448.2
A
1006-3242(2014)01-0030-05
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
