帶旋轉撓性太陽帆板衛星自適應控制
2014-08-09 22:11:48陸棟寧劉一武
航天控制 2014年1期
關鍵詞:系統
陸棟寧 劉一武
1. 北京控制工程研究所,北京 100190 2. 空間智能控制技術重點實驗室,北京 100190
?
帶旋轉撓性太陽帆板衛星自適應控制
陸棟寧1,2劉一武1
1. 北京控制工程研究所,北京 100190 2. 空間智能控制技術重點實驗室,北京 100190
為了應對航天器質量分布變化對姿態控制系統性能產生的影響,本文研究了帶旋轉撓性太陽帆板衛星的自適應姿態控制問題,其中對衛星本體轉動慣量陣設計了參數自適應律,而慣量參數的不確定性是通過線性參數化方法表達的。基于類Lyapunov分析方法,這一時變系統的閉環穩定性和估計誤差的有界性得到了證明。與PD控制的仿真對比表明,自適應控制對于衛星姿態和帆板驅動具有更好的性能。
對日定向太陽帆板;模態恒等式;自適應控制;參數估計
航天器的質量分布可能因為種種因素而發生很大變化,如燃料的消耗或意外泄漏,附件或內部元件的運動等等,這些因素將對姿控性能產生不利影響,而如果質量參數的變化過于激烈,甚至可能使系統失穩。為了應對這種情況,魯棒控制和自適應控制是兩類主要的解決方案。相比試圖尋找不變的控制器以應對各種變化狀況的魯棒控制策略,自適應控制的基本思想是通過調節控制器來適應對象模型的變化,以較小的代價達到較高的系統性能。在航天器姿態自適應控制中,J. Ahmed 等人給出了適用于剛性航天器的自適應姿態跟蹤控制律,其關鍵技巧是對星體轉動慣量參數化以設計參數自適應律。通過周期指令對系統的激勵,Ahmed 給出的自適應控制系統還能夠辨識星體轉動慣量[1]。此后,自適應控制技術被推廣到了帶有固定撓性附件的衛星姿態控制系統,并與其它一些先進控制策略巧妙地結合起來[2-3],以獲得更為優異的系統性能。
相比于具有固定撓性太陽帆板的衛星系統,本文研究了具有撓性旋轉太陽帆板的衛星姿態跟蹤問題,其中太陽帆板在驅動裝置的作用下實現對日定向,使得電能獲取效率最大化。由于太陽帆板的運動,系統動力學變得更復雜,此時航天器的轉動慣量,以及航天器姿態運動與附件撓性振動之間的耦合系數陣都是連續時變的。一個早期的控制方案是針對某個特定太陽帆板位置,如45°下的衛星系統構型,設計魯棒H∞控制器[4]。另外一些方法則是將系統動力學方程從本體坐標系投影到太陽帆板局部坐標系下,以實現多輸入多輸出耦合系統解耦為3個單輸入單輸出系統,在此基礎上再設計LQG或H∞控制器[5]。直到近年來,伴隨星載計算技術的進步,增益調度等自適應控制算法開始應用到這類復雜衛星之中[6]。
本文的主要目標是將自適應控制策略從附件固定的衛星系統推廣到附件運動的系統中。與以往的結果不同的是,并不致力于針對由于太陽帆板轉動引起的系統轉動慣量陣變化設計自適應控制系統,因為通過對系統動力學的研究可以發現,太陽帆板旋轉引起的轉動慣量的變化是能夠比較精確地計算出來的。而另一方面,如果考慮整個系統的參數變化問題,那么不可避免地要對撓性耦合系數陣的時變特性一起考慮,而撓性耦合系數陣規模巨大,這在目前的條件下設計自適應算法仍然存在困難。因此,轉而致力于考慮航天器中心體轉動慣量陣的不確定性,利用線性參數化技術設計了自適應姿態跟蹤控制算法。利用類Lyapunov函數證明了閉環系統的穩定性,并討論了慣量矩陣的估計誤差。最后通過數值仿真,將本文的理論結果與經典PD控制進行對比,證實本文設計的控制器具有更好的性能。
1 數學模型
不失一般性,考慮如圖1所示的具有單翼旋轉撓性太陽帆板衛星模型。設ω= [ωxωyωz]T為衛星三軸姿態角速度,Ω為帆板轉速,η=[η1η2…ηN]T為N階撓性模態坐標,那么帶有可控旋轉撓性太陽帆板衛星動力學模型為[7]
(1)
(2)

(3)
Cbs是向量從帆板固連坐標系到本體坐標系的坐標轉換矩陣:
(4)
其中,α∈[0, 2π)是帆板沿俯仰軸的轉角。Jbs是帆板轉動對衛星姿態運動的剛性耦合系數陣,其表達式為
(5)
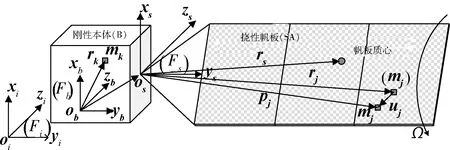
圖1 帶旋轉撓性帆板衛星模型
與之相對,Hs和Hbs是撓性耦合系數陣,其中Hs是帆板振動對其自身轉動的耦合系數陣,Hbs是帆板振動對衛星姿態運動的耦合系數陣,且
(6)
式中,Ps是帆板振動對其自身平動的耦合系數陣。顯然,Hs和Ps是恒值矩陣,而Hbs和Jbs是周期時變矩陣,它們取決于帆板轉角位置。這些矩陣具有如下一些重要性質,即
(7)
這些關系式稱為模態恒等式[8-9],它們在后續章節的控制器設計中具有重要作用。
具有受控帆板衛星的一個基本控制問題是衛星本體姿態對地定向,而帆板對日定向。定義本體姿態相對軌道坐標系的3個歐拉角為滾動角(ψ),俯仰角(θ),偏航角(φ),那么在小角度假設下的姿態誤差運動學方程可以表達為
(8)
其中Θ=[ψθφ]T,而
(9)
ωd=[0 -ωo0]T是期望的姿態角速度,而ωo是衛星軌道角速度。另一方面,帆板需對日定向,其跟蹤誤差方程為
(10)
式中,Δα=α-Ωdt且Ωd=ωo。因此,控制問題可以歸結為:根據可測量輸出Θ,ω,α和Ω設計自適應控制器T和τ使得

(11)
2 自適應控制系統設計
為了設計自適應控制器,設k1>0,k2>0并定義下述新變量
(12)

(13)
(14)
注意到J=Jb+Js,而Js和Jbs可由式(2)和(5)精確計算得到。假設本體轉動慣量陣由于燃料消耗存在不確定性。為了對其進行估計,取
(15)
式中χ=[JbxxJbyyJbzzJbxyJbxzJbyz]T是本轉動陣Jb的各分量,而算子
(16)
(17)
類似地,對于式(1)的第2個方程,有
TIs
τ-TIs
(18)
對于第3個方程,注意到式(13)可得
(19)
取k3>0,k4>0,考慮自適應控制器
(20)
其參數自適應律為
(21)
定理1 設中心剛體轉動慣量陣緩慢變化或兩次質量分布發生變化之間保持恒定。存在充分大ki>0 (i=1, … , 4),自適應控制器(20)和(21)作用下的系統(1)、(8)和(10)是漸近穩定的,而對轉動慣量陣Jb的估計誤差有界。
證明 考慮如下類 Lyapunov 函數

(22)

(23)
式中1是N×N單位陣。顯然V的正定性取決于矩陣M。利用模態恒等式
(24)
其中,所有零矩陣都有適當的維數。那么,矩陣M的特征值就是本體轉動慣量陣的特征值以及0, 1, …, 1, 且均為非負數。因此V≥ 0,即V有下確界。
考慮閉環系統(17)、(18)和(19),對函數V求時間導數可得

(25)

(26)
其中,λm是阻尼陣D的最小特征值。存在如下不等式
(27)
其中ε>0,有

(28)
式中
(29)

(30)

(31)
其中‖‖2是L2范數。因為V(t)≥0,進一步可以得到
(32)
(33)

(34)
因此,由動力學關系可知,系統(1),(8)和(10)在自適應控制律(20)和(21)是漸近穩定的。但是,根據參數自適應律(21),對本轉動慣量陣Jb的估計伴隨狀態的收斂而收斂,但不一定是真值。因此其估計誤差是有界的。證畢。
3 仿真研究
利用美國 GOES-8號氣象衛星參數[7],對自適應控制系統進行數值仿真,并與PD控制作對比。控制器增益設為k1=2,k2=0.5,k3=100,k4=80,參數估計增益矩陣為 Г = 5 × 105× 16×6,衛星姿態歐拉角以及帆板轉角初值設為0。模態坐標初值設為 0.005×[1 1 1 1 1]T,而慣量估計初值為[1000 1000 1000 -10 -10 -20]Tkg·m2。其余狀態變量初始值均為0。設本體主慣量在10s時發生大約20%的變化。
在上述條件下對閉環系統的自適應控制和 PD 控制利用 ode23 解算器進行了 25s仿真,其輸入及輸出響應如圖2~7所示。仿真結果表明,兩類控制器均達到了控制目標,且控制力矩都在合理范圍內。由圖6可知,轉動慣量的自適應辨識在系統穩定后即停止,由于缺乏持續激勵條件,并沒有收斂到真值。但是相比 PD 控制,自適應控制下的狀態變量經歷更短的動態過程,姿態跟蹤誤差和振動抑制效果更好。
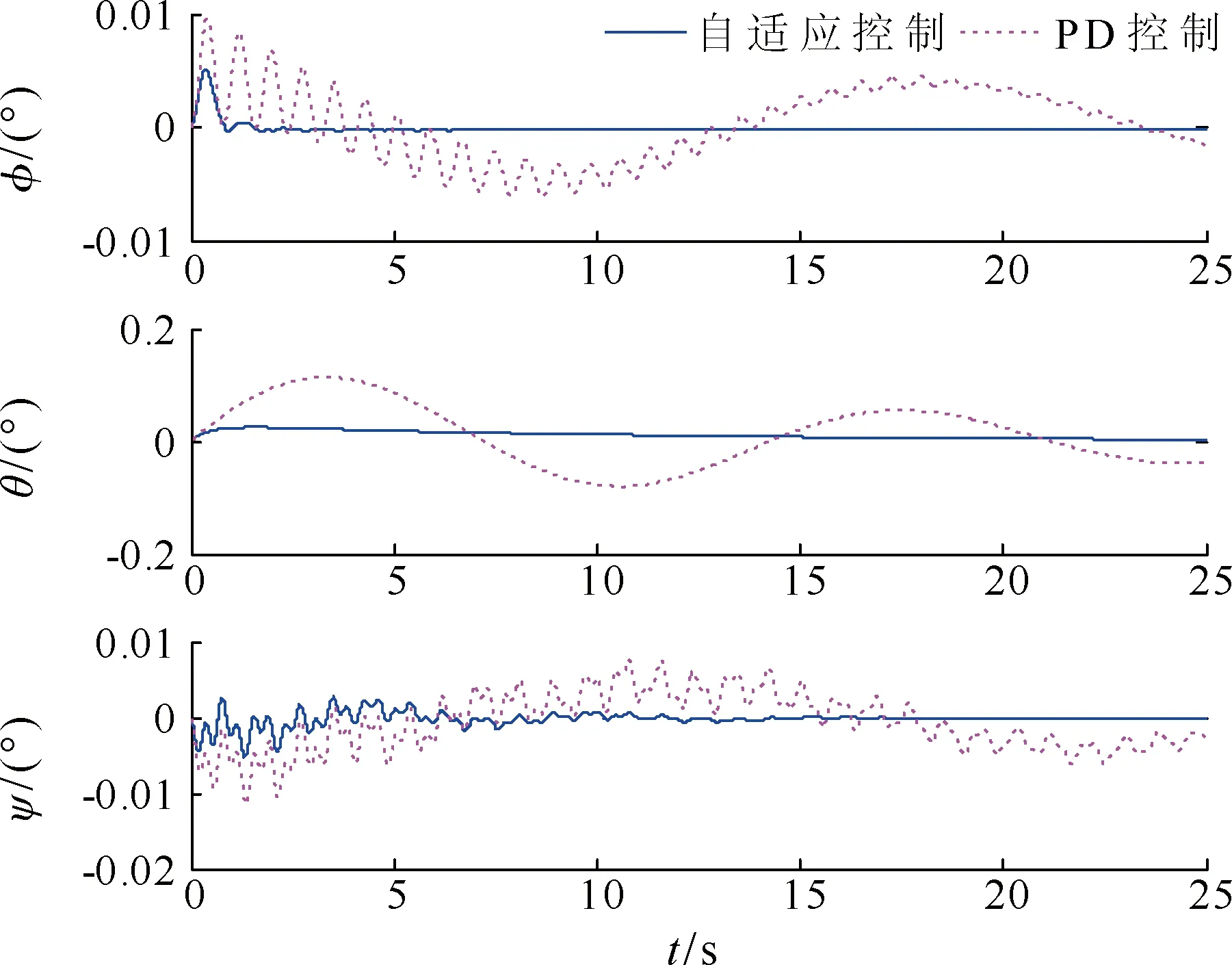
圖2 衛星姿態歐拉角
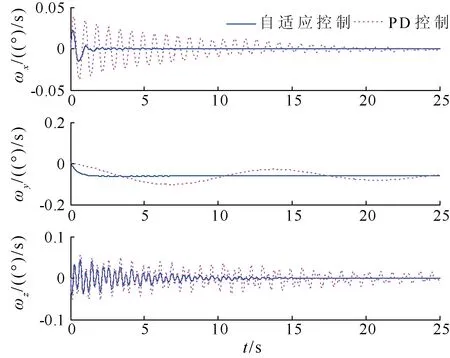
圖3 衛星姿態角速度
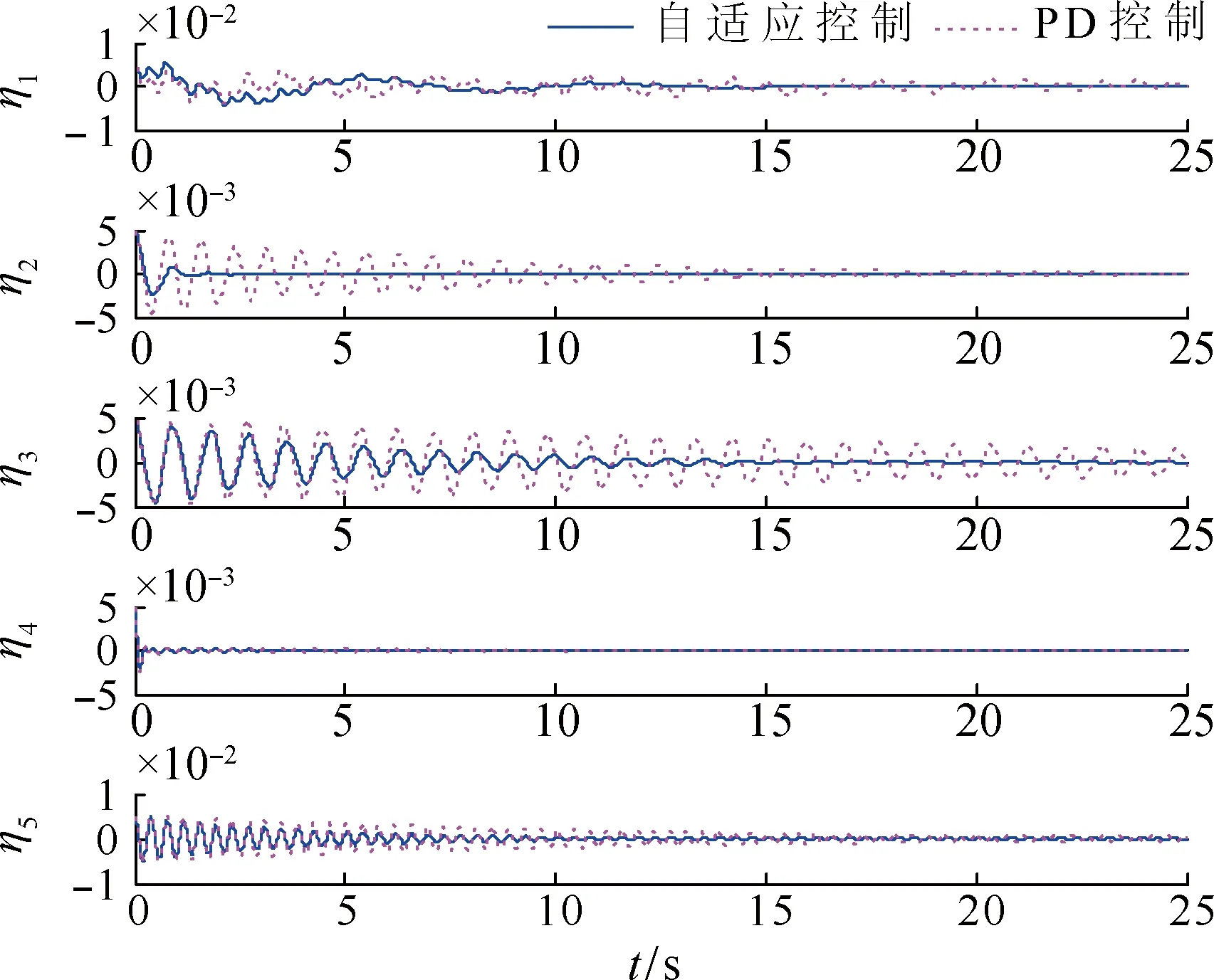
圖4 帆板撓性振動模態坐標
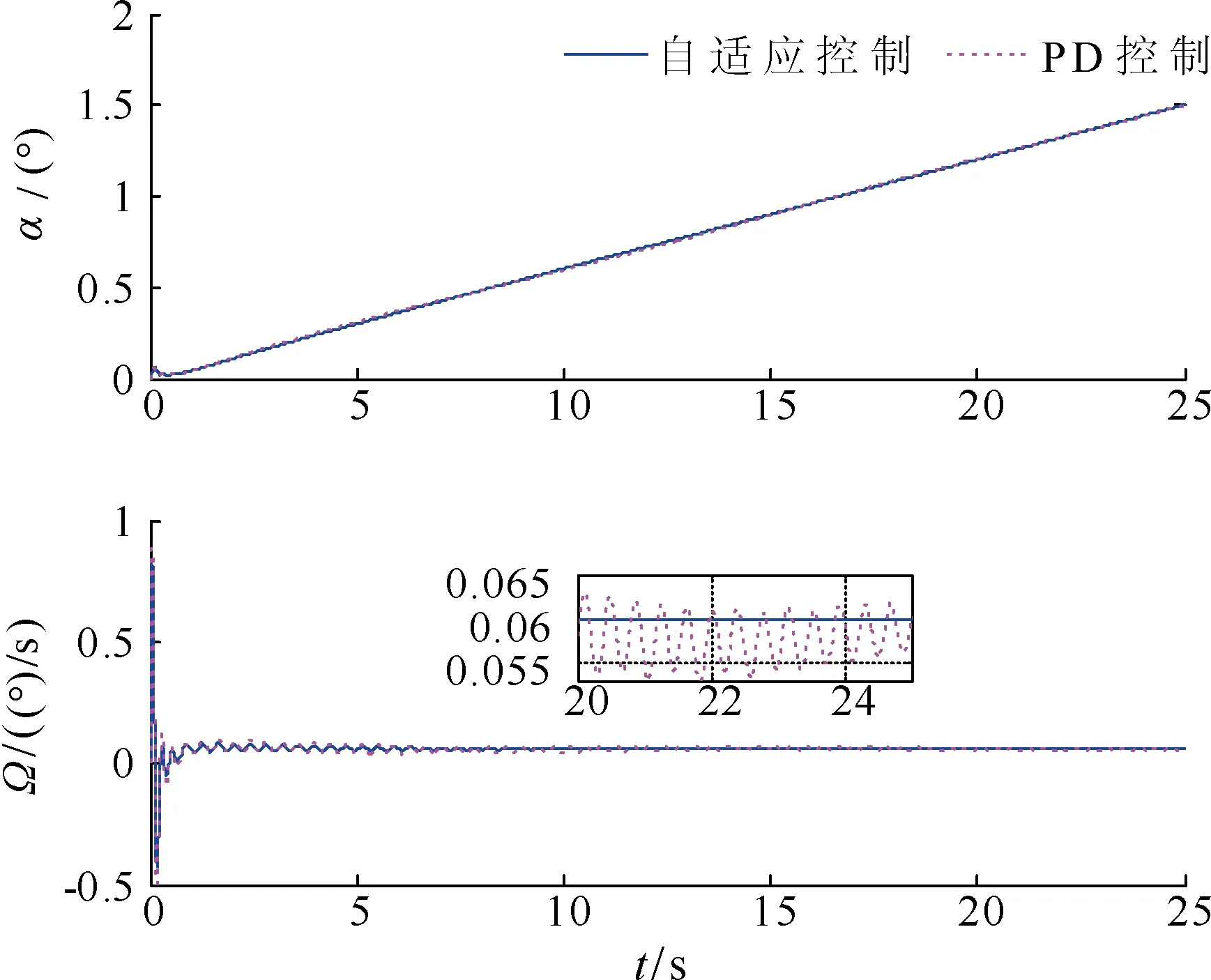
圖5 帆板轉速和轉角
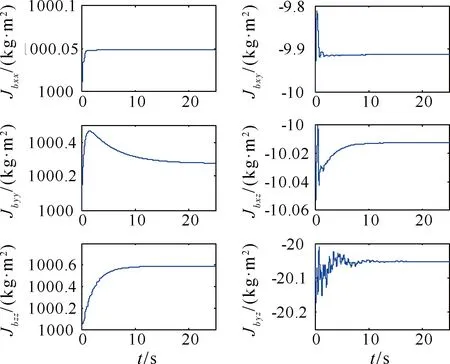
圖6 衛星本體慣量參數估計
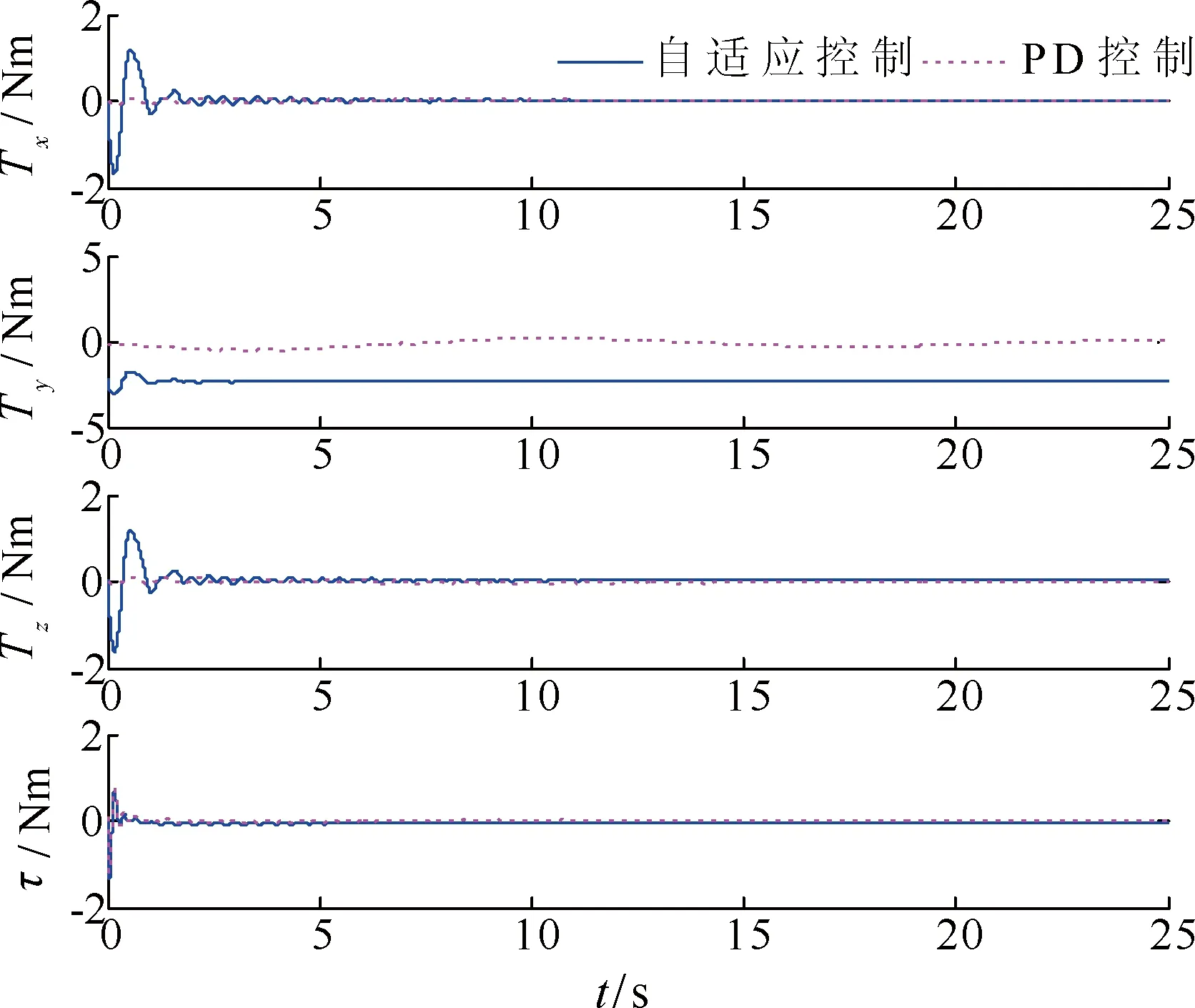
圖7 姿態控制力矩和帆板轉矩
4 結論
本文考慮了本體轉動慣量陣在參數發生變化時的自適應控制問題,將線性參數化方法推廣到了帶有旋轉撓性太陽帆板衛星的姿態控制中,基于 Lyapunov 理論對系統穩定性進行了數學證明,通過數值仿真驗證了控制器的性能。但是,如果將這類參數化方法進一步推廣到對整星質量參數作自適應控制時,由于需要辨識的參數過多,仍然存在很大困難,值得進一步研究。
[1] Ahmed J. Adaptive Asymptotic Tracking of Spacecraft Attitude Motion with Inertia Matrix Identification [J]. Journal of Guidance, Control, and Dynamics, 1998, 21(5): 684-691.
[2] 胡慶雷, 馬廣富, 姜野.控制受限的撓性航天器姿態機動自適應變結構輸出反饋控制[J].宇航學報,2007, 28(4): 875-879. (Hu Q L, Ma G F, Jiang Y. Adaptive Variable Structure Output Feedback Maneuvering Control for Flexible Spacecraft with Input Constraints [J]. Journal of Astronautics, 2007, 28(4): 875-879.)
[3] 馬廣富, 周稼康, 胡慶雷, 等.衛星編隊飛行輸出反饋姿態協同跟蹤控制[J].宇航學報, 2011, 32(10): 2133-2139. (Ma G F, Zhou J K, Hu Q L, et al. Output Feedback Attitude Synchronization Tracking Control for Formation Flying Satellite [J]. Journal of Astronautics, 2011, 32(10): 2133-2139. )
[4] Valentin-Charbonnel C, Duc G, Ballois S L. Low-order Robust Attitude Control of an Earth Observation Satellite [J]. Control Engineering Practice, 1999, 7: 493-506.
[5] Kida T, Yamaguchi I, Chida Y, et al. On-Orbit Robust Control Experiment of Flexible Spacecraft ETS-VI [J]. Journal of Guidance, Control, and Dynamics, 1997, 20(5): 865-872.
[6] Hamada Y, Ohtani T, Kida T, et al. Synthesis of A Linearly Interpolated Gain Scheduling Controller for Large Flexible Spacecraft ETS-VIII [J]. Control Engineering Practice, 2011, 19: 611-625.
[7] Tadikonda S S K. Articulated, Flexible Multibody Dynamics Modeling: Geostationary Operational Environmental Satellite-8 Case Study [J]. Journal of Guidance, Control, and Dynamics, 1997, 20(2): 276-283.
[8] Hughes P C, Skelton R E. Modal Truncation for Flexible Spacecraft [J]. Journal of Guidance and Control, 1981, 4(3): 291-297.
[9] Hablani H B. Modal Identities for Multibody Elastic Spacecraft [J]. Journal of Guidance, 1991,14(2): 294-303.
[10] Slotine J-J E, Li W. Applied Nonlinear Control [M]. Beijing, China Machine Press, 1991.
Adaptive Control of the Spacecraft with a Rotating Flexible Solar Array
LU Dongning1,2LIU Yiwu1
1. Beijing Institute of Control Engineering, Beijing 100190, China 2. Science and Technology on Space Intelligent Control Laboratory, Beijing 100190, China
Inordertoattenuatetheinfluencecausedbythevariationofthemassdistributionofsatellitestotheattitudecontrolsystem,thispaperisconcernedwiththeadaptiveattitudecontrolproblemofasatellitewitharotatingflexiblesolararray.Anadaptivecontrolschemeisdesignedtoadjustthevariationsofthemassdistributionsofthespacecraftcentralbody.Theuncertaininertiaparametersareisolatedbylinearparameterizationmethod.BasedontheLyapunov-likeanalysis,closed-loopstabilityandboundednessofidentificationerrorsofthistime-varyingsystemareensured.NumericalsimulationscomparedwithPDcontrolareperformedtoshowthattheadaptivecontrolforthespacecraftandthesolararrayhasbetterperformances.
Sun-trackingsolararray;Modalidentity;Adaptivecontrol;Parameterestimation
2013-03-12
陸棟寧(1982-),男,廣東人,博士研究生,主要研究方向為復雜航天器姿態動力學與控制;劉一武(1968-),男,湖南人,研究員,主要從事航天器導航、制導與控制研究。
TP316.2
A
1006-3242(2014)01-0049-06
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
