大跨徑預(yù)應(yīng)力混凝土連續(xù)剛構(gòu)橋懸澆法線性控制
2014-08-11 14:26:25朱明星
山西建筑 2014年27期
朱 明 星
(貴州省交通建設(shè)工程檢測(cè)中心有限責(zé)任公司,貴州 貴陽(yáng) 550008)
大跨徑預(yù)應(yīng)力混凝土連續(xù)剛構(gòu)橋懸澆法線性控制
朱 明 星
(貴州省交通建設(shè)工程檢測(cè)中心有限責(zé)任公司,貴州 貴陽(yáng) 550008)
以松柏山大橋?yàn)槔捎肕IDAS軟件建立了計(jì)算模型,對(duì)大跨徑預(yù)應(yīng)力混凝土連續(xù)剛構(gòu)橋懸澆法線性控制進(jìn)行了計(jì)算分析,為橋梁的后期建設(shè)提供了理論的立模標(biāo)高數(shù)據(jù)。
連續(xù)剛構(gòu)橋,預(yù)應(yīng)力混凝土,懸澆段,計(jì)算
1 工程概況
松柏山大橋位于貴陽(yáng)市花溪區(qū)黨武至湖潮城市道路工程,全橋長(zhǎng)345 m,主橋左右線橋跨布置均為(65+110+65)m+3×35 m預(yù)應(yīng)力混凝土剛構(gòu)+預(yù)應(yīng)力混凝土梁。主跨采用單箱雙室變截面箱梁,控制斷面梁高:中間支點(diǎn)處7.0 m,邊跨直線段及主跨跨中處3.0 m,其高跨比分別為1∶15.7和1∶36.7。箱梁橫截面為單箱雙室直腹板,箱梁頂板寬度為19.0 m,底板寬度為12.6 m,翼板懸臂長(zhǎng)度為3.2 m。箱梁底板水平,通過腹板的高差,實(shí)現(xiàn)頂板單向1.5%橫坡,主橋墩為1.2 m×12.6 m的鋼筋混凝土雙肢薄壁墩。其主橋橋型立面布置見圖1。
該橋主墩“T”構(gòu)劃分為15個(gè)縱向?qū)ΨQ梁?jiǎn)卧吙绲默F(xiàn)澆段長(zhǎng)8.8 m,梁?jiǎn)卧膭澐譃?1 m(0號(hào)段),2.5 m(1號(hào)段),6×3 m,8×3.5 m,2 m(合龍段),累計(jì)懸臂總長(zhǎng)54 m。梁段采用掛籃懸臂澆筑施工,懸臂澆筑梁段最大控制重量225.2 t(2號(hào)梁段),掛籃設(shè)計(jì)自重1 125 kN(包括全部施工荷載)。全橋共有2×5個(gè)合龍段,合龍段長(zhǎng)度為2 m(采用型鋼桁架作合龍段勁性骨架)。
2 大跨徑預(yù)應(yīng)力混凝土連續(xù)剛構(gòu)橋懸澆法線性控制方法
2.1 線性監(jiān)控的作用

線性監(jiān)控的作用是讓橋梁成橋線性符合設(shè)計(jì)要求,但在實(shí)際的施工中會(huì)存在各種誤差影響目標(biāo)狀態(tài)的實(shí)現(xiàn),所以要根據(jù)實(shí)際情況分析出各種誤差產(chǎn)生的原因,預(yù)測(cè)和對(duì)下一施工階段的調(diào)整。保證成橋后橋梁線性、合龍段兩懸臂端標(biāo)高的相對(duì)偏差不大于規(guī)定值以及結(jié)構(gòu)內(nèi)力狀態(tài)符合設(shè)計(jì)要求。
線性監(jiān)控中產(chǎn)生誤差的因素有計(jì)算誤差、儀器誤差、環(huán)境誤差、人為誤差、系統(tǒng)誤差等。在施工實(shí)際情況中通過比較實(shí)測(cè)值與理論值進(jìn)行誤差的識(shí)別與修正,從而保證線性符合要求。
2.2 結(jié)構(gòu)分析與預(yù)拱度的計(jì)算
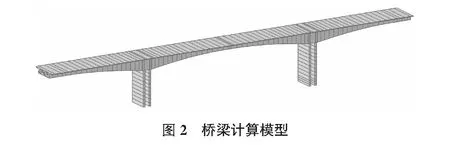
結(jié)構(gòu)分析是結(jié)構(gòu)施工控制的主要工作內(nèi)容之一,該項(xiàng)工作根據(jù)施工過程與成橋運(yùn)營(yíng)情況來完成各施工狀態(tài)及成橋后的內(nèi)力、應(yīng)力與位移計(jì)算,進(jìn)而確定出結(jié)構(gòu)各施工階段的應(yīng)力與位移理論值。計(jì)算考慮施工的進(jìn)程、時(shí)間、相應(yīng)狀態(tài)臨時(shí)荷載、環(huán)境溫度、截面的變化、結(jié)構(gòu)變化、混凝土的收縮與徐變、預(yù)加應(yīng)力等因素。根據(jù)計(jì)算分析可確定出橋梁的預(yù)拱度,預(yù)測(cè)下一施工狀態(tài)及施工成橋狀態(tài)的內(nèi)力與位移。該橋主橋的總體計(jì)算采用空間桿系有限元法,利用國(guó)內(nèi)外著名的橋梁結(jié)構(gòu)專業(yè)分析軟件MIDAS CIVIL進(jìn)行計(jì)算 。橋梁的計(jì)算模型和預(yù)拱度如圖2,圖3所示。

2.3 掛籃變形的計(jì)算
掛籃的變形分為兩部分:一為彈性變形,即在混凝土的荷載作用下產(chǎn)生變形;其二非彈性變形,即由于掛籃自身連接部位的松弛產(chǎn)生的變形。懸臂施工的掛籃為鋼結(jié)構(gòu),在混凝土澆筑后會(huì)產(chǎn)生下?lián)希斐上淞合聯(lián)希瑸榈玫綊旎@的彈性變形以及消除非彈性變形,所以掛籃安裝完成后要進(jìn)行掛籃預(yù)壓實(shí)驗(yàn),采用分級(jí)加載,最大加載噸位為最大控制重量225.2 t(2號(hào)梁段),根據(jù)測(cè)試結(jié)果繪制成荷載—撓度曲線表,所得到的掛籃彈性變形值fgli在表中內(nèi)插得到。
2.4 懸澆段立模標(biāo)高的計(jì)算
立模標(biāo)高通過下式給出:Hlmi=Hsji+∑fzr+fgli。其中,Hlmi為i節(jié)段立模標(biāo)高;Hsji為i節(jié)段設(shè)計(jì)標(biāo)高;∑fzr為后續(xù)所有節(jié)段和所有的工況變更對(duì)本梁段產(chǎn)生的撓度變形總和;fgli為i節(jié)段掛籃本身在混凝土重力作用下的彈性變形。∑fzr=∑f1i+∑f2i+f3i+f4i+f5i+f6i。其中,∑f1i為各梁段恒重在i節(jié)段所產(chǎn)生撓度總和;∑f2i為各階段預(yù)應(yīng)力張拉產(chǎn)生的梁體上撓量的總和;f3i為混凝土應(yīng)力收縮徐變?cè)趇節(jié)段所產(chǎn)生的變形;f4i為臨時(shí)荷載在i節(jié)段引起的變形;f5i為不同體系溫度差在i節(jié)段引起的變形;f6i為i節(jié)段預(yù)拋高值。其中,∑f1i,∑f2i,f3i,f4i,f5i是在計(jì)算模型中通過正裝分析和倒拆分析得到;f6i為后期預(yù)拱度值一般采用L/1 000~L/2 000。
2.5 懸澆段測(cè)點(diǎn)的布設(shè)及控制
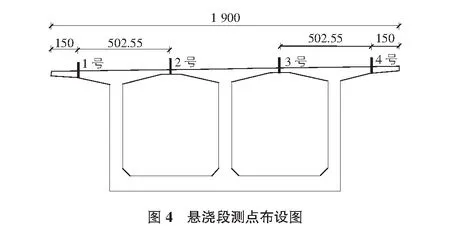
通過橋梁附近的導(dǎo)線控制網(wǎng),在各個(gè)橋墩墩頂部設(shè)基準(zhǔn)點(diǎn),基準(zhǔn)點(diǎn)采用圓鋼制作,并焊接在鋼筋籠上,頂部磨圓,露出混凝土面約20 mm,在其周邊做好保護(hù)措施和標(biāo)識(shí),并且每隔7 d進(jìn)行一次聯(lián)測(cè),同時(shí)觀測(cè)各個(gè)墩的變形。每節(jié)梁段前端設(shè)置4個(gè)測(cè)點(diǎn)(離階段前端20 cm處)用以觀測(cè)施工變形和箱梁有無(wú)扭轉(zhuǎn);測(cè)點(diǎn)采用圓鋼筋制作,并焊接鋼筋籠上,頂部磨圓露出混凝土面20 mm,周邊采用紅油漆標(biāo)記,如圖4所示。
每一個(gè)懸澆段要進(jìn)行6個(gè)工況的高程、撓度和軸線的觀測(cè),即掛籃就位及立模板后、澆筑混凝土前、澆筑混凝土后、張拉預(yù)應(yīng)力鋼束前、張拉完預(yù)應(yīng)力鋼束后、移動(dòng)掛籃前。對(duì)主梁的節(jié)段撓度進(jìn)行平行獨(dú)立測(cè)量,相互校核。橋梁截面形狀的測(cè)量主要包括:主梁上頂板與下底板的寬度、邊腹板與中腹板的厚度、上頂板和下底板的厚度、節(jié)段截面高度以及節(jié)段的長(zhǎng)度等。
3 結(jié)語(yǔ)
大跨度預(yù)應(yīng)力混凝土剛構(gòu)橋線性控制是保證懸臂澆筑施工順利合龍以及成橋后線性與設(shè)計(jì)線性相符的重要手段和方法。本文針對(duì)松柏山大橋建設(shè)的具體情況,進(jìn)行了剛構(gòu)橋懸臂施工的線性控制計(jì)算,為橋梁的后期建設(shè)提供了理論的立模標(biāo)高數(shù)據(jù)。結(jié)合后期施工的實(shí)際監(jiān)測(cè)數(shù)據(jù)進(jìn)行對(duì)比、比較和校正,能夠保證松柏山大橋順利建成通車。
[1] 姜 浩.懸臂澆注大跨度預(yù)應(yīng)力連續(xù)梁橋施工控制的研究[M].吉林:吉林大學(xué)出版社,2005.
[2] 雷俊卿.橋梁懸臂施工與設(shè)計(jì)[M].北京:人民交通出版社,2000.
[3] 葛耀君.分段施工橋梁分析與控制[M].北京:人民交通出版社,2003.
[4] 常永梅.高速鐵路支架現(xiàn)澆梁施工線性控制技術(shù)[J].山西建筑,2013,39(4):187-188.
[5] 王法武,石雪飛.大跨度預(yù)應(yīng)力混凝土梁橋長(zhǎng)期撓度控制分析[J].上海公路,2006(11):39-40.
[6] 向中富.橋梁施工控制技術(shù)[M].北京:人民交通出版社,2003.
The cantilever method linear control of largespan pre-stressed concrete continuous rigid frame bridge
ZHU Ming-xing
(GuizhouTrafficConstructionEngineeringTestingCenterLimitedLiabilityCompany,Guiyang550008,China)
Taking Songbai Mountain bridge as an example, this paper established the calculation model using MIDAS software, made calculation and analysis on cantilever method linear control of large span pre-stressed concrete continuous rigid frame bridge, provided theory vertical mold elevation data for post bridge construction.
continuous rigid frame bridge, pre-stressed concrete, cantilever, calculation
2014-07-14
朱明星(1988- ),男,助理工程師
1009-6825(2014)27-0189-03
U448.23
A
猜你喜歡
現(xiàn)代裝飾(2022年5期)2022-10-13 08:48:04
建材發(fā)展導(dǎo)向(2022年10期)2022-07-28 03:04:00
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
水利規(guī)劃與設(shè)計(jì)(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學(xué))(2019年3期)2019-06-17 11:57:44
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2019年4期)2019-04-22 03:28:24
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
