二級倒立擺的參數自校正模糊PI控制
2014-08-16 01:08:48鄧雄峰
網絡安全與數據管理 2014年12期
李 露,李 峰,鄧雄峰
(1.陜西科技大學 電氣與信息工程學院,陜西 西安710021;2.聚泰實業香港有限公司,廣東 深圳518000)
倒立擺系統廣泛地應用在非線性控制理論和研究方面。對于不同的倒立擺類型,控制方法比較多,主要有:雙 PID及自適應 PID控制[1]、LQR及自適應 LQR[2]、LQG控制[3]、模糊邏輯控制[5-6]、自適應滑模模糊控制[7]、模糊聚類[8]、神經控制[9]、遺傳算法[10]等,這些方法均能有效地控制倒立擺系統。但這些控制算法有其優缺點,同樣復雜的控制算法,實時控制效果不是很好,增加了實現的難度。PID控制器能夠有效地處理穩定狀態響應,但是,要想精確地調整PID控制器的增益是相當困難的;LQR算法在線性系統中能夠較好運用,而在非線性較強的系統中也存在一些不足之處;參考文獻[5-8]在模糊邏輯控制的基礎上采用不同的算法,能夠有效地控制非線性系統。模型建立好之后,非線性系統總是線性化在平衡點附近。忽略其他次要部分,這也會導致大的誤差;遺傳算法控制能夠在全局范圍內進行優化,具有更高的效率,但是也存在不足之處。其交叉和突變作用,不能夠確保個體具有較好的適應度,給目標函數的選取增加了困難。
本文在總結模糊控制和LQR算法基礎上,設計了一種參數自校正模糊PI控制器。運用LQR方法,設計了融合函數,對模糊控制器進行降階處理,實現參數在線自校正。通過仿真實驗結果顯示,這種模糊控制方法能有效控制二級倒立擺系統。
1 二級倒立擺物理模型
在忽略空氣阻力、各種接觸摩擦之后,將二級倒立擺系統等效為小車,勻質桿和質量塊組成的剛性系統如圖1所示,物理參數如表1所示。


圖1 二級倒立擺系統模型圖
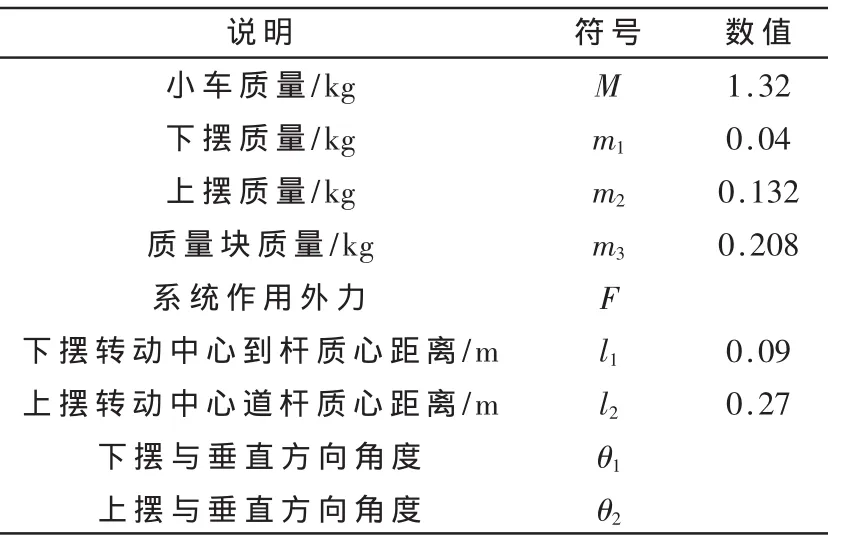
表1 物理參數

其中,U為系統輸入,Y為系統輸出。A、B、C、D為矩陣,分別為:
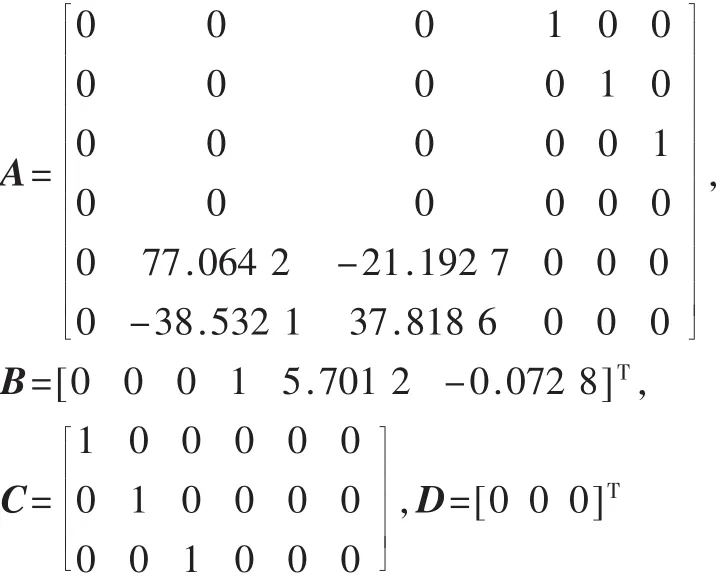
通過調用MATLAB函數可以判斷,二級倒立擺系統是能控能觀的。 由于開環極點為 p1,2,3,4=0、p5,6=±6.2074j,可知系統是不穩定的。要使系統穩定,就需要外加控制器。
2 參數自校正模糊PI控制器的設計
2.1 融合函數的設計
二級倒立擺系統有小車位移和速度、下擺角度和角速度、上擺角度和角速度6個變量,如果將這6個變量作為模糊控制器的輸入,每個輸入變量在論域范圍內取7個模糊子集,則會出現76=117 649條推理規則,這會大大影響模糊控制器的性能。由于線性系統具有可融合的特點,在此將二級倒立擺系統6個變量融合成為綜合誤差E和綜合誤差變化量EC,作為模糊控制器的輸入,則融合函數設計如下[12]。

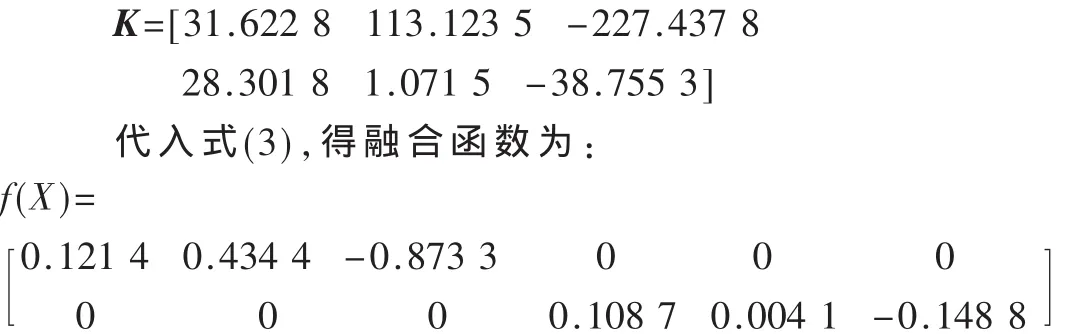
(2)根據反饋矩陣K,融合函數可設計為:
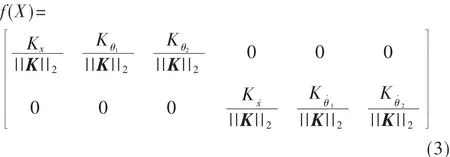
(3)融合函數的輸出,即模糊控制器的輸入為:

2.2 參數自校正模糊PI控制器的設計
在基本模糊控制器基礎上,設計了參數自校正模糊PI控制器[5-8]。經上述融合函數降維后,根據圖2所示的模糊控制二級倒立擺結構圖,選擇合適的量化因子Ke、Kec和比例因子Ku。E、EC作為模糊控制器1的輸入量,U作為輸出控制量。輸入量和輸出量均采用三角型隸屬度函數進行模糊化,每個語言變量的論域為{-6,6},語言 值 設 為 {PB,PM,PS,ZE,NS,NM,NB}, 分 別 表 示{正大,正中,正小,零,負小,負中,負大},以重心法解模糊化[13]。模糊控制器1控制規則表如表2所示。
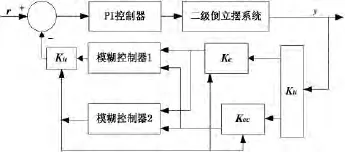
圖2 模糊控制二級倒立擺結構圖
為了對模糊控制器 1的參數 Ke、Kec、Ku進行自校正,引入模糊控制器2,其調整方法為:當系統的誤差E和誤差的變化EC較大時,應加快系統響應速度,此時需要降低量化因子Ke和Kec來降低E和EC輸入量的分辨率,同時加大比例因子 Ku,使響應加快;當E和EC較小時,說明系統已經趨于穩定,此時要求提高系統精度,要增大量化因子Ke和Kec來提高對輸入變化的分辨率,同時減小比例因子,以減小超調量。此處 Ke、Kec增加的倍數與比例因子Ku的減小倍數相同。
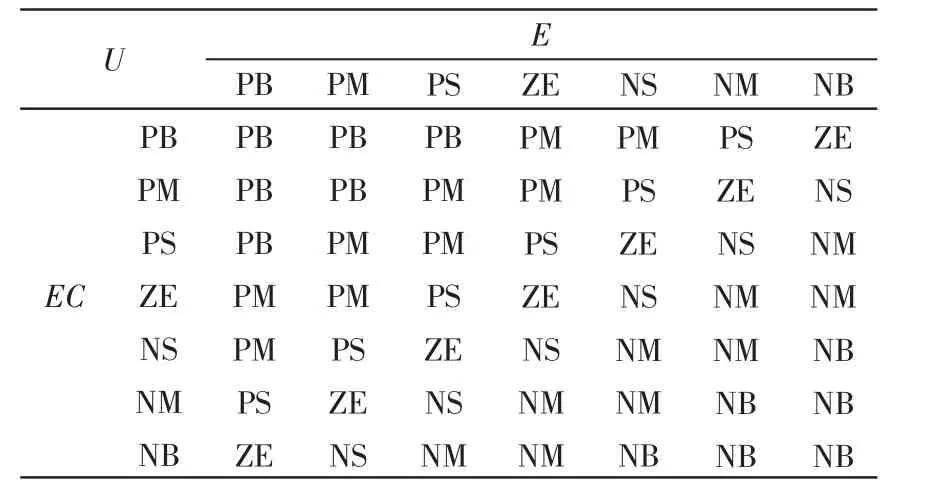
表2 模糊控制器1控制規則表
選擇輸入量和輸出量均為三角型隸屬度函數進行模糊化,取 Ke、Kec的論域為{-6,6},在論域范圍內把 E、EC 劃分為 {NB,NS,NM,ZE,PS,PM,PB}7個模糊子集,取定義 Ku的論域為{0.125,0.25,0.5,1,2,4,8},模糊子集定義為{AH,AM,AL,KO,CL,CM,CH},分別表示{高放,中放,低放,不變,低縮,中縮,高縮},以重心法解模糊化。模糊控制器2控制規則表如表3所示。
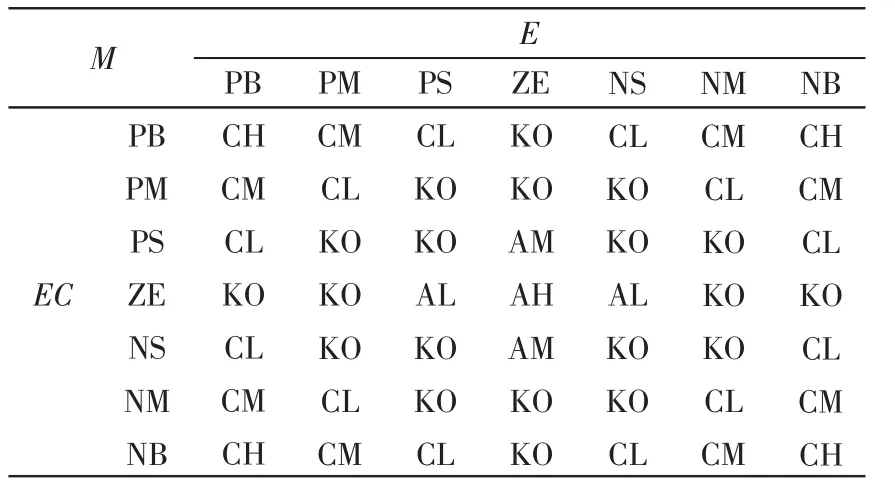
表3 模糊控制器2控制規則表
其中,參數調整方法為:(1)以原始的 Ke、Kec對 E、EC進行量化得到 E′、EC′;(2)將 E′、EC′作為模糊控制器 2 的輸入量,輸出控制量為調整倍數M;(3)令=KeM,=KecM,=Ku/M;(4)用調整后的參數、對 E、EC 重新量化;(5)用重新量化得到的 E′、EC′作為模糊控制器 1的輸入,得到控制量U;(6)用比例因子乘以U獲得控制量 u。
對整定得出的控制量u與系統輸入量作差,作為PI控制器的輸入,再將PI控制器的輸出作為二級倒立擺狀態模型的輸入,即可以對二級倒立擺系統進行仿真研究。
3 仿真結果分析
在Simulink環境中建立的二級倒立擺的參數自校正模糊PI和模糊控制器的仿真結構圖如圖3所示。
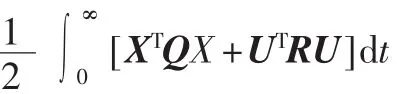
根據式(1),取 Q=diag(1000,500,500,0,0,0),R=1,采用LQR方法得到狀態反饋矩陣K為:
取系統的初始值為零,設置仿真時間為5 s,仿真步長為5 ms,通過多次調整參數,得到兩種控制器仿真曲線圖如圖4所示。由圖4可知,小車最終距離初始位置10 cm左右處保持平衡,下擺擺角偏離平衡位置最大值為0.05 rad,上擺擺角偏離平衡位置最大值為0.003 rad,系統能在2.5 s左右時間內達到并維持平衡,由此可見控制效果比較理想。比較兩者的仿真結果可知,基于融合函數的參數自校正模糊PI控制器不僅能使小車維持平衡,而且系統的響應速度也較快,可以用來對二級倒立擺實物系統實時控制。
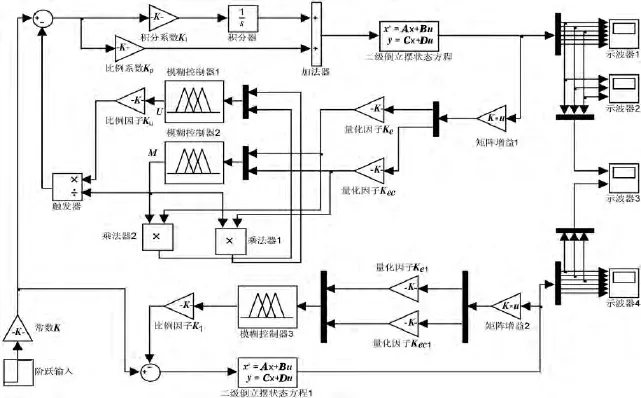
圖3 參數自校正模糊PI和模糊控制器的仿真結構圖
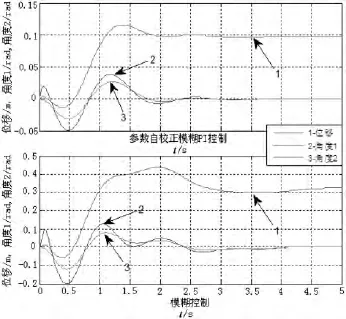
圖4 參數自校正模糊PI和模糊控制器的仿真曲線
在基本模糊控制器結構上,設計了一種參數自校正模糊PI控制器,通過融合函數對模糊控制器的輸入進行降維,避免了控制規則過多而影響控制性能的缺點,同時又對模糊控制器的量化因子和比例因子進行在線校正調整,達到了自校正目的。為了測試倒立擺系統魯棒性,選用了外部測試方法(即施加外力與系統),系統能夠很快校正偏差,回到平衡位置。仿真結果和圖5實時控制曲線表明,這種控制器能有效地控制二級倒立擺系統,具有良好的穩態性能,響應速度較快,魯棒性較好。
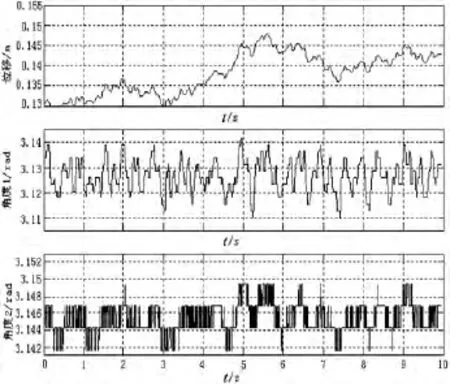
圖5 二級倒立擺實時控制曲線
[1]GEORGE J,KRISHNA B,GEORGE V I,et al.Design of adaptive pid controller based on maximum modulus theorem for inverted pendutum on a cart[J].Sensors&Transducers,2012,145(10):163-171.
[2]Zhang Jiaolong,Zhang Wei.LQR self-adjusting based control for the planar double inverted pendulum[J].Physics Procedia,2012(24):1669-1676.
[3]EIDE R,EGELID P M,STAMSO A,et al.LQG control for balancing an inverted pendulum mobile robot[J].Intelligent Control and Automation,2011,2(2):160-166.
[4]Yi Jianqiang,YUBAZAKI N,HIROTA K.A new fuzzy controller for stabilization of parallel-type double inverted pendulum system[J].Fuzzy Sets and Systems,2002,126(1):105-119.
[5]KIZIR S,BINGUL Z,OYSU C.Fuzzy control of a real time inverted pendulum system[J].Journal of Intelligent&Fuzzy Systems,2010(21):123-133.
[6]Huang Chenghao,Wang Wenjuan,Chiu Chihhui.Design and implementation of fuzzy control on a two-wheel inverted pendulum[J].IEEE Transaction on Industrial Electronics,2011,58(7):2988-3001.
[7]Duan Xuechao,Qiu Yuanying,Duan Baoyan.Adaptive sliding mode fuzzy control of planar inverted pendulum[J].Control and Decision,2007,22(7):774-777.
[8]SIVARAMAN E,ARULSELVI S.Modeling of an inverted pendulum based on fuzzy clustering techniques[J].Expert Systems with Applications,2011,38(11):13942-13949.
[9]HASSANZADEH I,MOBAYEN S.PSO-based controller design for rotary inverted pendulum system[J].Journal of Applied Science,2008,8(16):2907-2912.
[10]Ping Zhaowu,Huang Jie.Approximate output of spherical inverted pendulum by neural network control[J].Neurocomputing,2012,85(5):38-44.
[11]宋君烈,肖軍,徐心和.倒立擺系統的Lagrange方程建模與模糊控制[J].東北大學學報(自然科學版),2002,23(4):333-337.
[12]邢景虎,陳其工,江明.二級倒立擺基于融合函數的模糊控制[J].合肥工業大學學報(自然科學版),2011,34(8):1155-1158.
[13]蔡自興.智能控制(第二版)[M].北京:電子工業出版社,2004.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
裝備制造技術(2019年12期)2019-12-25 03:06:46