含柔性鉸鏈的仿人機(jī)器人柔性足設(shè)計及動力學(xué)仿真
2014-08-16 09:13:34張亞平周建軍陳耀
機(jī)械制造與自動化 2014年3期
張亞平,周建軍,陳耀
(杭州電子科技大學(xué) 機(jī)械工程學(xué)院,浙江 杭州 310018)
0 引 言
不同于工業(yè)機(jī)器人被限制在固定的空間工作,仿人機(jī)器人具有靈活的行走系統(tǒng),可隨時到達(dá)需要的地方,包括一些人類難以到達(dá)的環(huán)境,完成人或系統(tǒng)指定的工作。仿人機(jī)器人基于仿生學(xué)設(shè)計實現(xiàn),用雙足實現(xiàn)移動,相對于輪式、履帶式機(jī)器人具有眾多的優(yōu)點,如其能適應(yīng)各種復(fù)雜的地面并且具有很高的跨越障礙的能力,工作空間范圍大,能耗低等[1]。
仿人機(jī)器人上述這些優(yōu)點使其對自身的機(jī)械結(jié)構(gòu)和驅(qū)動系統(tǒng)有很高的要求,足部機(jī)構(gòu)是仿人機(jī)器人關(guān)鍵技術(shù)之一。與人類相比,仿人機(jī)器人在行走時,很難預(yù)料到地面的實際情況,所以很容易受到來自地面的沖擊力,產(chǎn)生振動,這種沖擊會通過踝關(guān)節(jié)傳遞到機(jī)器人的整個軀干,對機(jī)器人各個關(guān)節(jié)的運轉(zhuǎn)產(chǎn)生影響,使其動態(tài)平衡受到干擾,導(dǎo)致機(jī)器人行走不穩(wěn)定,而不斷的調(diào)整足部的姿態(tài)會使仿人機(jī)器人能耗大幅度升。所以較為理想的足部機(jī)構(gòu)是結(jié)構(gòu)緊湊,尺寸、質(zhì)量合理,具有吸收沖擊的能力,以便于提高仿人機(jī)器人行走的穩(wěn)定性和減少能耗。
本文提出了一種含有多維柔性鉸鏈仿人機(jī)器人柔性足部結(jié)構(gòu),使得仿人機(jī)器人能夠很好地吸收不平整路面對其自身的沖擊,降低電機(jī)和精密傳動件被損壞的風(fēng)險,并減少了足部機(jī)構(gòu)的能耗,節(jié)省了能量,可使機(jī)器人高效持久的行走。
1 足部機(jī)械結(jié)構(gòu)設(shè)計
本文旨在設(shè)計一種結(jié)構(gòu)輕巧、緊湊,可適應(yīng)復(fù)雜地面的具有柔順特性的仿人機(jī)器人足部結(jié)構(gòu),以提高仿人機(jī)器人在受到地面沖擊力時的自我調(diào)整能力。所設(shè)計的仿人機(jī)器人柔性足部結(jié)構(gòu)如圖1所示,包括踝支撐座、六維力/力矩傳感器、多維柔性鉸鏈、腳底板、橡膠墊和波形彈簧等。踝支撐座及六維力/力矩傳感器固定在多維柔性鉸鏈上,多維柔性鉸鏈安裝在腳底板上,腳底板的下層有波形彈簧和橡膠墊。當(dāng)足部受到來自地面的沖擊力時,波形彈簧被壓縮,同時多維柔性鉸鏈也產(chǎn)生變形,起到緩沖作用。橡膠墊可有效減弱波形彈簧及多維柔性鉸鏈產(chǎn)生形變時引起的振動。足部結(jié)構(gòu)整體尺寸為長210mm,寬150mm,高155mm,質(zhì)重約1.5kg,可承受載荷量為55kg。

圖1 柔性足部結(jié)構(gòu)
1.1 多維柔性鉸鏈設(shè)計
所設(shè)計的多維柔性鉸鏈?zhǔn)腔趥蝿傮w模型法來完成的。如圖2所示為平面四桿全柔順機(jī)構(gòu)示意圖[2],其中A、B、C、D四處是由薄而短的彈性體做成的柔性轉(zhuǎn)動副。當(dāng)主動件上作用有驅(qū)動力矩Mi時,該機(jī)構(gòu)由于各柔性轉(zhuǎn)動副的彈性變形,使得構(gòu)件3上產(chǎn)生輸出力矩MO。桿4相當(dāng)于大地,現(xiàn)將其去掉,但為了保證整個機(jī)構(gòu)的平穩(wěn)性,在桿2上B、C之間的某點通過柔性鉸鏈增加另一桿4,同時,將桿1、3、4釋放出來的另一端分別通過柔性鉸鏈和5、6、7桿連接,而5、6、7的末端與大地固結(jié),從而形成一個空間柔順機(jī)構(gòu)。改進(jìn)后的機(jī)構(gòu)不僅可以承受空間力、力矩的作用,而且可以很大程度地拓展其運動空間。

圖2 四桿柔順機(jī)構(gòu)
根據(jù)機(jī)器人的步態(tài)特點,機(jī)器人足在行走時除了垂直方向能夠緩沖沖擊外,至少要能夠?qū)崿F(xiàn)俯仰和偏航兩個方向的自由度,以便在地面不平或碰到障礙物時,機(jī)器人能夠自我調(diào)整,實現(xiàn)平穩(wěn)的行走。綜合考慮以上因素,設(shè)計了如圖3所示的一種多維柔性鉸鏈。
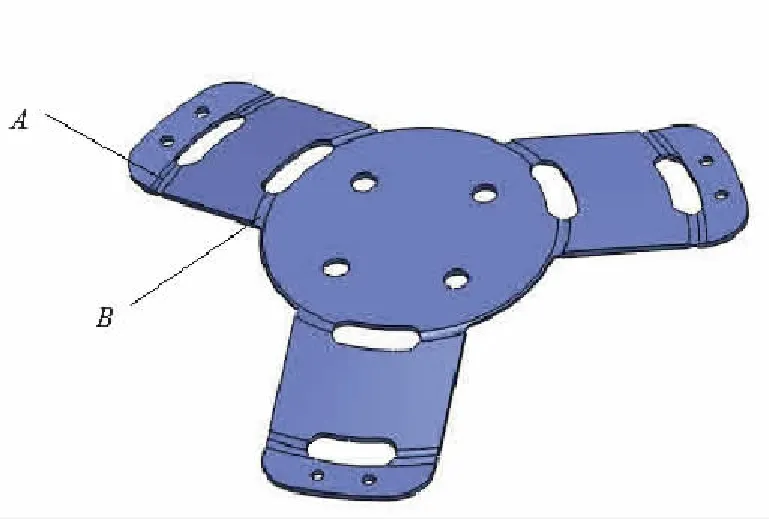
圖3 多維柔性鉸鏈
1.1.1 多維柔性鉸鏈垂直方向剛度特性分析
為了探究多維柔性鉸鏈的剛度特性,先對圖3所示的多維柔性鉸鏈的其中一個柔性支撐單元進(jìn)行相關(guān)分析。將其中一個柔性支撐單元從多維柔性鉸鏈中分離出來,簡化后的負(fù)載模型如圖4(a)所示,是一個一端固定,另一端保持水平方向的懸臂梁,因此,末端必有相應(yīng)的力矩M0。所得到的變形結(jié)果關(guān)于梁的中點對稱,此處,梁的變形角α最大,而曲率為0。根據(jù)伯努利-歐拉對梁的假設(shè),力矩與曲率成正比,即梁的中間點的力矩大小為0[3]。

圖4 單個柔性支撐單元負(fù)載模型
變形梁末端的坐標(biāo)可用下面的參數(shù)方程來表示,方程為[4]:
m=l·[1-γ(1-cosα)]
(1)
n=lγsinα
(2)
其中,γ—特征半徑系數(shù),α—變形角。
為了保證梁的末端保持水平方向而加的力矩的大小,可通過下面方式計算:
(3)
將(1)式中的m帶入式(3),得:
(4)
單個柔性支撐單元的負(fù)載偽剛體模型如圖4(b)所示。圖中的兩個扭簧代表圓弧型柔性轉(zhuǎn)動副A和B,其剛度為[5]:
(5)
其中,
b—— 圓弧型柔性轉(zhuǎn)動副的寬度;
h——圓弧型柔性轉(zhuǎn)動副的高度;
t——圓弧的最小厚度;
R——圓弧的半徑;
M——所受的力矩大小。
所受力矩M的大小也可以表示為:
(6)
聯(lián)立式(5)和式(6),可得:
(7)
從式(7)式可以看出,對已經(jīng)設(shè)計好的柔性鉸鏈,外力F與變形角α是呈線性關(guān)系的,亦即多維柔性鉸鏈的剛度曲線是一條斜率保持不變的直線。將相關(guān)設(shè)計參數(shù)代入到式(7)式中,得到α的最大值為12°,則多維柔性鉸鏈垂直方向的最大位移n約為1.6mm。多維柔性鉸鏈在垂直方向受力時的剛度為300.5N/mm。
1.1.2 多維柔性鉸鏈俯仰、偏航方向剛度特性分析
如前文所述,當(dāng)機(jī)器人在平整的路面上行走時,腳步受力較均勻,足部機(jī)構(gòu)的緩沖主要是垂直位移。但是,當(dāng)其行走在復(fù)雜路面時,代替踝關(guān)節(jié)的多維柔性鉸鏈要能保證機(jī)器人可以繞俯仰軸或偏航軸偏轉(zhuǎn)一定的角度以進(jìn)行姿態(tài)調(diào)整,此時就存在最大俯仰角和最大偏航角的問題。
最大俯仰角和最大偏航角的計算方法與垂直方向位移計算類似,將多維柔性鉸鏈的受力面沿著俯仰軸或偏航軸分成兩部分,加大小相反的力F, 利用三角函數(shù)關(guān)系,即可得:
(11)
最大力矩值為:
Mmax=F·dmax
(12)
ε——受力方向的位移;
d——受力點與偏轉(zhuǎn)軸之間的距離;
利用商用有限元分析計算軟件,分析計算結(jié)果如表1所示。
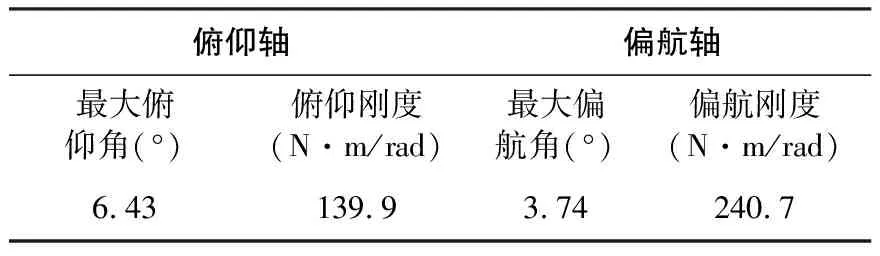
表1 多維柔性鉸鏈有限元分析結(jié)果
綜合以上計算結(jié)果可得,本文設(shè)計的多維柔性鉸鏈的主要變形還是發(fā)生在垂直方向;同時,在俯仰和偏航方向也具有理想的變形量,且不同方向剛度特性不同,可很好的滿足機(jī)器人著陸時要能緩沖沖擊力要求。
2 基于SimMechanics的足部系統(tǒng)動力學(xué)建模與仿真
SimMechanics 內(nèi)建有許多物理元件的模塊(block),包括:機(jī)身(body)、關(guān)節(jié)(joint)、約束條件(constraint)、坐標(biāo)系統(tǒng)(coordinate system)、制動器(actuator)、傳感器件(sensor)等。SimMechanics 為機(jī)械系統(tǒng)提供了多種仿真分析方式: 正向動力學(xué)分析,逆向動力學(xué)分析,運動學(xué)分析。使用SimMechanics作動力學(xué)仿真,不需要推導(dǎo)機(jī)械系統(tǒng)的動力學(xué)數(shù)學(xué)模型,直接使用相關(guān)模塊就可以構(gòu)成仿真模型,直觀簡便[6-7]。
利用SimMechanics所建立的足部系統(tǒng)的動力學(xué)模型如圖5所示,其含有三個body模塊,分別代表了支撐座、腳底板和橡膠墊。腳底板與橡膠墊之間添加了力元件(force elements)來表達(dá)波形彈簧的剛度特性和橡膠墊的阻尼特性。設(shè)計了一種利用由傳感器件(sensor)和制動器(actuator)以及其他常見數(shù)學(xué)模塊組合而成的模塊來表示柔性鉸鏈的剛度特性。

圖5 足部系統(tǒng)動力學(xué)模型
所設(shè)計的柔性足的主要特征是引入了上文所述的多維柔性鉸鏈,所以為了反映引入柔性鉸鏈后足部系統(tǒng)動力學(xué)性能的變化,對有/無多維柔性鉸鏈的足部系統(tǒng)進(jìn)行了動力學(xué)對比仿真分析。將足部結(jié)構(gòu)的相關(guān)參數(shù)帶入到圖5中對應(yīng)的模塊,即柔性鉸鏈的剛度系數(shù)305.5N/mm,波形彈簧的剛度系數(shù)為135.4N/mm,緩沖墊的等效阻尼為125.1N·s/m以及腳底板、支撐板的質(zhì)量等。對足部施加激勵后得到系統(tǒng)的位移、速度、加速度響應(yīng)曲線如圖6所示。
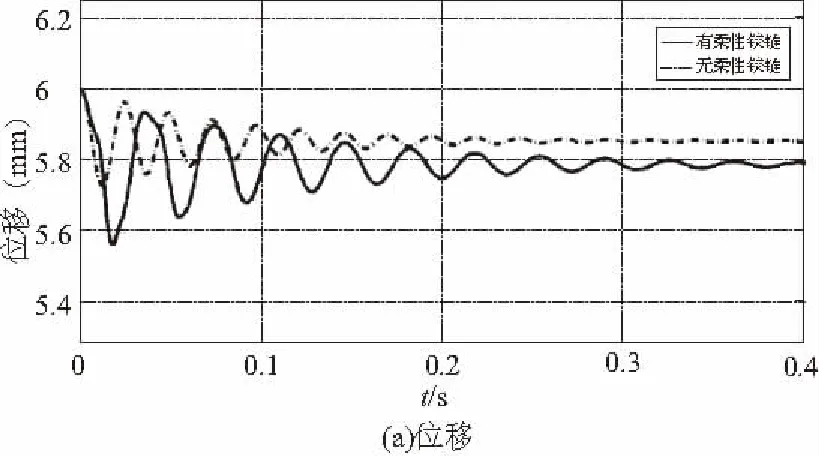
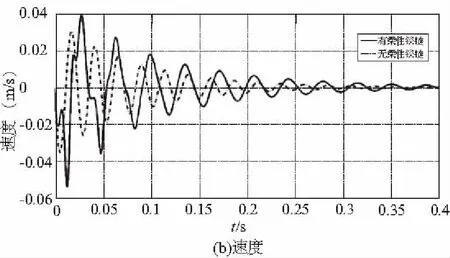

圖6 系統(tǒng)位移、速度、加速度響應(yīng)曲線
圖6的仿真結(jié)果表明,在引入了多維柔性鉸鏈后,足部系統(tǒng)的動力學(xué)性能明顯提升,足部受到?jīng)_擊時緩沖位移約增大50%,反應(yīng)速度提升約30%,加速度也明顯較大,可使彈簧緩沖的能量快速釋放,有利于機(jī)器人安全高效持久的行走。
3 結(jié)語
仿人機(jī)器人行走時足底會受到路面沖擊的作用,使得機(jī)器人行走不平穩(wěn),嚴(yán)重時甚至?xí)p壞機(jī)器人各關(guān)節(jié)的傳動元件。為此,基于偽剛體模型法改進(jìn)演化了柔順平行四桿機(jī)構(gòu),設(shè)計出了多維柔性鉸鏈,其可以承受空間力/力矩的作用,詳細(xì)分析了多維柔性鉸鏈不同受力情況下的力—位移關(guān)系,并通過SimMechanics模塊對整個足部系統(tǒng)的動力學(xué)進(jìn)行了建模和仿真分析。結(jié)果表明,所設(shè)計的集成多維柔性鉸鏈、彈簧和橡膠墊的足底機(jī)構(gòu)可以很好的緩沖地面的沖擊,有利于提高機(jī)器人行走時的穩(wěn)定性和保護(hù)機(jī)器人關(guān)節(jié)不受損傷;同時,緩沖時存儲能量且釋放速度快,可使機(jī)器人高效持久的行走。
[1] 謝濤,徐建峰,張永學(xué).仿人機(jī)器人的研究歷史、現(xiàn)狀及展望[J].機(jī)器人,2002,24(4): 367-374.
[2] 謝先海.柔順機(jī)構(gòu)分析與設(shè)計方法的研究[D].武漢:華中科技大學(xué)博士論文,2002:15-17.
[3] 于靖軍,畢樹生,宗光華.空間全柔性機(jī)構(gòu)位置分析的剛度矩陣法[J].北京航空航天大學(xué)學(xué)報,2002(3): 323-326.
[4] Larry L.H.柔順機(jī)構(gòu)學(xué)[M].北京:高等教育出版社,2007:110-117.
[5] 江冬艷.含柔性鉸鏈并聯(lián)機(jī)器人剛度分析及動力學(xué)仿真[D].南昌:南昌大學(xué),2010:13-14.
[6] 張力勛,董玉紅.機(jī)電系統(tǒng)仿真與設(shè)計[M].哈爾濱:哈爾濱工程大學(xué)出版社,2006:40-41.
[7] 徐生林,劉艷娜.兩足機(jī)器人的SimMechanics建模[J].浙江大學(xué)學(xué)報,2010,44(7):1361-1367.
猜你喜歡
民用飛機(jī)設(shè)計與研究(2020年4期)2021-01-21 09:15:02
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2018年18期)2018-11-14 01:48:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06