衛星導航信號波形畸變引起的碼跟蹤偏差
2014-08-21 08:58:20劉建成桑懷勝
全球定位系統 2014年2期
徐 赟,劉建成,桑懷勝
(北京衛星導航中心,北京 100094)
0 引 言
自從GPS SV19號衛星被發現信號異常以來,衛星導航信號質量問題受到越來越多地重視,而衛星導航信號異常對導航接收機的影響是一項重要的研究內容[1-4]。針對衛星載荷可能出現的故障現象,許多文獻提出了各種不同的故障模型,而 2OS模型是國際民航組織認可的衛星導航信號畸變模型[5]。該模型把數字電路故障、模擬電路故障和混合電路故障引起的畸變波形分別稱為TMA、TMB和TMC,由超前/滯后參數、震蕩頻率和衰減因子等3個可變參數來定義[6]。2OS模型被廣泛應用于導航信號質量監測及標志為可用衛星的模型參數估計[5-7]。
由于衛星導航信號異常導致接收機相關函數異常,從而改變DLL的鑒別函數特性,最終導致碼跟蹤產生偏差。監測接收機的偽距測量在衛星導航系統中用于導航衛星的定軌和星地時間同步,偽距測量決定衛星導航系統的服務精度,因此為確定信號異常對導航衛星定軌和星地時間同步的影響需要定量分析衛星導航信號異常引起的偽碼測距的變化。
文獻[8]分析了載波泄露和頻譜非對稱性異常對碼跟蹤誤差的影響。文獻[9]通過對衛星載荷模擬單元部分的建模,研究了寬帶衛星導航信號經模擬單元處理后的碼跟蹤偏差。文獻[10]研究了正弦幅度波動、正弦相位波動、帶限和雜散發射等線性信號畸變及非恒包絡調制(THP)對伽利略碼跟蹤精度的影響。文獻[11]和[12]研究了基于2OS模型在BOC調制情況下的碼跟蹤偏差,數值分析了多個固定2OS模型參數碼跟蹤偏差隨相關器間隔變化情況。但上述文獻沒有分析故障模型參數空間范圍內引起的碼跟蹤偏差。由于現實情況下監測接收機的相關器間隔不能隨意改變,因此需要研究相關器間隔固定時故障模型參數空間范圍內的波形畸變引起的碼跟蹤偏差。通過數值分析更直觀顯示故障模型參數空間范圍內的所有可能波形畸變引起的碼跟蹤偏差,并進一步給出最大超前偏差和最大滯后偏差。
1 衛星導航畸變波形
TMA畸變波形用偽隨機碼碼片的下降沿超前或滯后來實現數字電路故障的建模[5]。該模型只有一個可變參數Δ,即超前/滯后參數,表示偽隨機碼碼元的下降沿超前或滯后多少。參數空間范圍是-0.12≤Δ≤0.12.
TMB畸變波形用衰減二階響應作為對模擬電路故障的建模,即[5]
式中:fd為震蕩頻率;σ為衰減因子;參數空間范圍是7.3≤fd≤13 MHz,0.8≤σ≤8.8 Mn/s.
TMC畸變波形是TMA模型和TMB模型的綜合,以實現對混合故障的建模。該模型包括三個可變參數Δ 、fd和σ,參數空間范圍同TMA模型和TMB模型。
2 2OS畸變波形的DLL鑒別器特性
典型的GNSS接收機對距離的測量是通過DLL對接收信號的偽碼跟蹤來實現的。忽略導航數據信息的GNSS接收機信號模型為
sR(t)=A·p(t-τ0)sin(2πf0t+φ0)+n(t).
(2)
式中:A為接收信號幅度;p(t-τ0)為導航衛星下播的偽碼波形;τ0為傳播時延;φ0為相位;f0為頻率;n(t)為接收機噪聲。
射頻估計誤差忽略不計,經混頻和濾波后,接收信號可表示為
sR(t)=A·p(t-τ0)sinφ0+n(t).
(3)
當相關器間隔為Td時,在DLL環路中本地產生即時、超前Td和Td滯后三個相位的擴頻碼。三路本地信號與接收信號相關處理后,即時、超前和滯后三個通道的I、Q支路輸出分別為
(4a)
(4b)
(4c)
(4d)
(4e)
(4f)

考慮導航接收機常用的三種類型的DLL鑒別器,分別為相干鑒別器、功率模式的非相干鑒別器和點積模式的非相干鑒別器。假設相位估計誤差可忽略,則相干鑒別器輸出為
(5)
功率模式和點積模式的非相干鑒別器輸出分別為
Dm=IE2+QE2-IL2-QL2
(6a)
Dm=(IE-IL)IP+(QE-QL)QP
(6b)
導航接收機的DLL盡可能地跟蹤鑒別器曲線的零交叉點,使輸入的碼跟蹤誤差最小。如果導航接收機接收到正常導航信號,在穩態跟蹤時鑒別器輸出為零時,碼跟蹤誤差也為零。但是,衛星導航波形畸變使零交叉點偏離了碼跟蹤誤差為零的位置,那么這個偏離量就是導航波形畸變引起的碼跟蹤偏差的大小,即
(7)
對正常信號和TMA、TMB、TMC三種畸變波形的三種鑒別器特性分別進行數值分析。偽碼速率為1.023 Mcps,相關器間隔為0.5個碼片。TMA模型參數:Δ=0.1.TMB模型參數:fd=4.5 MHz,σ=1 Mn/s.TMC模型參數:Δ=0.1,fd=4.5 MHz,σ=1 Mn/s.圖1示出了上述參數情況下的DLL鑒別器特性。
從圖中可以看出,衛星導航畸變波形改變了鑒別器特性,包括:1)改變了鑒別器零交叉點附近的斜率;2)鑒別器輸出為零時碼跟蹤誤差不為零,而是有偏離;3)三種鑒別器的偏離量相差很小。
3 碼跟蹤偏差數值分析
對TMA、TMB、TMC三種畸變波形的碼跟蹤偏差分別進行數值分析,以研究偏離距離在TMA、TMB、TMC模型參數空間范圍內變化情況。由于三種鑒別器的偏離相差不大,因此下面只分析相干鑒別器情況。
3.1 TMA畸變波形引起的碼跟蹤偏差
數值分析先固定偽碼速率為1.023 Mcps,相關器間隔為0.5個碼片。圖2示出了TMA在威脅參數空間范圍內的碼跟蹤偏差。從圖2可以看出,TMA畸變波形引起的碼跟蹤偏差與超前/滯后參數呈線性關系,而且在威脅參數空間范圍內最大碼跟蹤偏差接近60 ns.當相關器間隔大于0.06個碼片時,數值分析結果與相關器間隔為0.5個碼片時的結果相同。
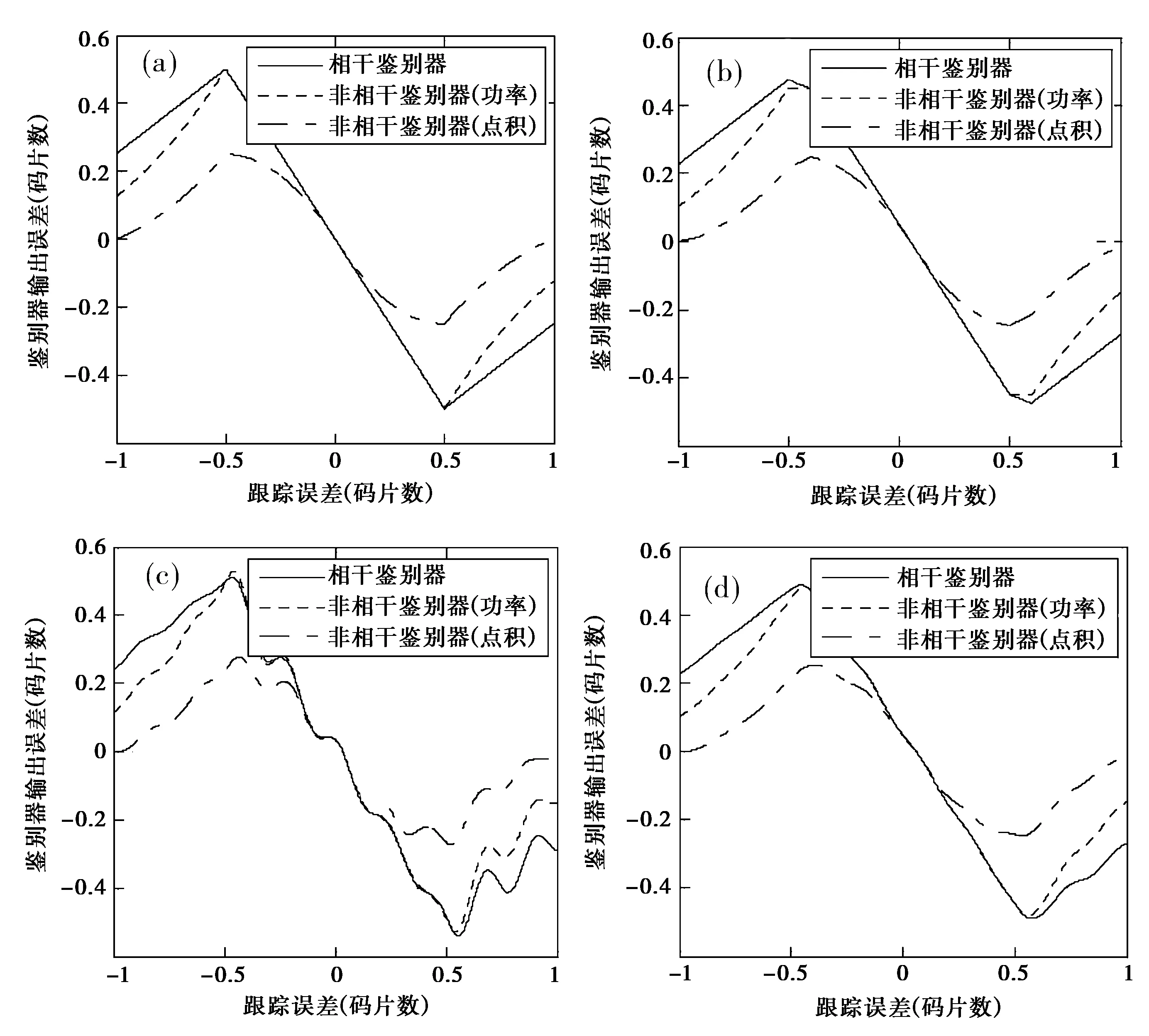
圖1 DLL鑒別器特性(a)正常信號;(b)TMA畸變波形;(c)TMB畸變波形;(d)TMC畸變波形
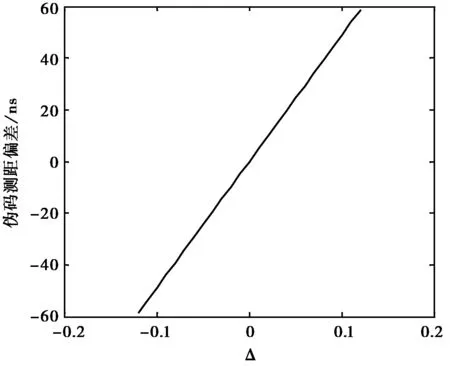
圖2 TMA畸變波形引起的碼跟蹤偏差
3.2 TMB畸變波形引起的碼跟蹤偏差
數值分析采用震蕩頻率采樣間隔Δfd=0.2 MHz,衰減因子采樣間隔Δσ=0.1 Mn/s.固定偽碼速率為1.023 Mcps,相關器間隔為0.5個碼片,圖3示出了TMB在威脅參數空間范圍內的碼跟蹤偏差。從震蕩頻率參數fd的角度看,碼跟蹤偏差周期性地出現多個頂峰和谷底。從衰減因子σ的角度看,碼跟蹤偏差與σ呈反比。
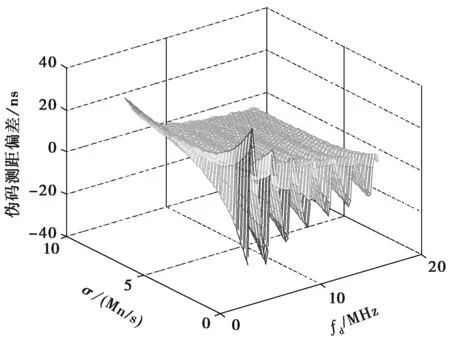
圖3 TMB畸變波形引起的碼跟蹤偏差
在典型的偽碼速率和相關器間隔情況下,TMB威脅參數空間范圍內碼跟蹤的最大超前偏差和最大滯后偏差如表1所示。可以看出,TMB在威脅參數空間范圍內碼跟蹤最大超前偏差和最大滯后偏差與偽碼速率和相關器間隔有關,典型參數情況下的最大超前偏差達到26.9 ns,最大滯后偏差達到43.0 ns,最大滯后誤差出現在相干間隔較小的情況。
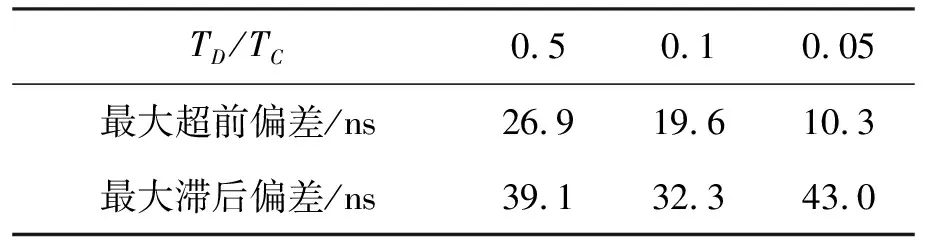
表1 TMB在威脅參數空間范圍內碼跟蹤最大超前偏差和最大滯后偏差(保留小數點后一位)
3.3 TMC畸變波形引起的碼跟蹤偏差
由于TMC模型是三個可變參數的函數,因此無法給出TMC在威脅參數空間范圍內的碼跟蹤偏差示意圖。數值分析采用超前/滯后參數Δ的采樣間隔為0.01,震蕩頻率采樣間隔Δfd=0.2 MHz,衰減因子采樣間隔Δσ=0.1 Mn/s.表2示出了在典型的偽碼速率和相關器間隔情況下,TMC威脅參數空間范圍內碼跟蹤的最大超前偏差和最大滯后偏差。可以看出,TMC在威脅參數空間范圍內碼跟蹤最大超前偏差和最大滯后偏差與偽碼速率和相關器間隔有關,最大超前偏差達到88.5 ns,最大滯后偏差達到90.4 ns.
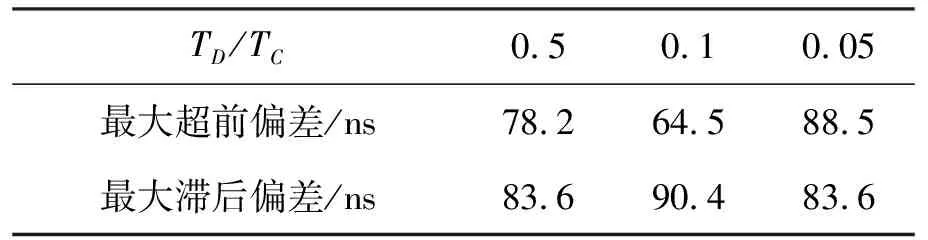
表2 TMC在威脅參數空間范圍內碼跟蹤最大超前偏差和最大滯后偏差(保留小數點后一位)
4 結束語
基于由3個可變參數定義的2OS模型的衛星導航畸變波形,研究了相關器間隔固定時2OS模型參數空間范圍內的波形畸變引起的碼跟蹤偏差。在BPSK調制的GNSS接收機信號模型下,衛星導航波形畸變使相干鑒別器、功率模式和點積模式的非相干鑒別器等三種DLL鑒別器的零交叉點均偏離了碼跟蹤誤差為零的位置,引起碼跟蹤偏差。對碼跟蹤偏差的數值分析結果表明:當相關器間隔大于0.06個碼片時,TMA畸變波形引起的碼跟蹤偏差與超前/滯后參數呈線性關系,而且在參數空間范圍內最大碼跟蹤偏差接近60 ns.相關器間隔為0.5、0.1、0.05個碼片時,TMB在參數空間范圍內碼跟蹤最大超前偏差達到26.9 ns,最大滯后偏差達到43.0 ns.在同樣的條件下,TMC在威脅參數空間范圍內碼跟蹤最大超前偏差達到88.5 ns,最大滯后偏差達到90.4 ns.
[1]盧曉春,周鴻偉.GNSS空間信號質量分析方法研究[J].中國科學:物理學 力學 天文學,2010,40(5):528-533.
[2]王 斌,龐 巖,劉會杰.導航信號有害波形檢測技術研究[J].電子與信息學報,2011,33(7):1713-1717.
[3]MACABIAU C,CHATRE E.Impact of evil waveform on GBAS performance[C]//Proceedings of the IEEE PLANS 2000,2000:22-29.
[4]WONG G,PHELTS R E,WALTER T,ENGE P.Bounding errors caused by nominal GNSS signal deformations[C]//Proceedings of the ION GNSS,Manassas,VA:ION GNSS,2011:2657-2664.
[5]MITELMAN A M.Signal quality monitoring for GPS augmentation systems[D].California:Standford University,2004.
[6]PHELTS R E.Multicorrelator techniques for robust mitigation of threats to GPS signal quality[D].California:Standford University,2001.
[7]PHELTS R E,WALTER T,ENGE P.Characterizing nominal analog signal deformation on GNSS signals[C]// Proceedings of the ION GNSS,2009:1343-1350.
[8]HE Chengyan,GUO Ji,LU Xiaochun,WANG Xue,etal.The impact of carrier leakage and spectral asymmetry distortions on the performance of navigation signals[C]//The 3rd China Satellite Navigation Conference,Guangzhou,China:CSNC ,2012:147-160.
[9]CHEN Yibo,KOU Yanhong ,ZHANG Zhengwen.Analog distortion of wideband signal in satellite navigation payload[C]//The 3rd China Satellite Navigation Conference,2012:89-100.
[10]SOELLNER M,KOHL R W,ASTRIUM L,etal.The impact of linear and non-linear signal distortions on Galileo code tracking accuracy[C]//Proceedings of the ION GNSS,2002:1270-1285.
[11]PHELTS R E,AKOS D M.Effects of signal deformations on modernized GNSS signals[J].Journal of Global Positioning Syetems,2006,5(1-2):2-10.
[12]ZHANG Zhengwen,KOU Yanhong,LIU Jiansheng,etal.Analysis of signal distortion impact on code tracking bias for high-order BOC modulation[C]// The 3rd China Satellite Navigation Conference,2012:79-88.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
