MEMS慣性導航傳感器
2014-08-26 02:48:02周紅進鐘云海易成濤
艦船科學技術 2014年1期
關鍵詞:振動
周紅進,鐘云海,易成濤
(海軍大連艦艇學院航海系,遼寧 大連 116018)
0 引言
近年來,在慣性傳感器領域,3種主要的技術在不斷提升軍用和民用能力:環形激光陀螺(RLGs),光纖陀螺(FOGs)以及 MEMS(Micro Electro Mechanical System)陀螺和加速度計。應用這些技術制造的陀螺和加速度計已經取代了除高精度應用領域之外幾乎所有的機械陀螺和加速度計。RLGs具有超高的標度因素穩定性和對重力不敏感,在許多軍用領域占據重要地位。FOGs作為RLGs一種成本低廉的替代品也逐漸滲透進RLGs的應用領域。MEMS慣性傳感器對于慣性導航系統的小型化具有關鍵意義。MEMS創造了慣性導航應用的新市場,如戰術級別的制導彈藥以及可以與GPS芯片進行組合導航的個人導航儀。圖1所示為近100年來慣性技術的發展情況。慣性傳感器應用領域廣泛,不同級別的應用精度要求也不一樣。不同級別的應用對應的精度要求如表1所示。在實際應用中,還有其他一些重要指標,如噪聲(隨機游走)也需要加以考慮。
MEMS具有體積小、成本低廉等潛力,吸引了全世界的科研人員致力于發展民用和戰術級別的MEMS導航系統。當前已經實用的最好MEMS IMU陀螺漂移約為5~20°/h,加速度計零偏約為1 mg,但還未真正達到戰術應用的精度。MEMS IMU將逐漸滲透進FOGs和RLGs占據統治地位的戰術級別的應用市場,并將開辟新的需要更小體積和更低成本的應用領域。
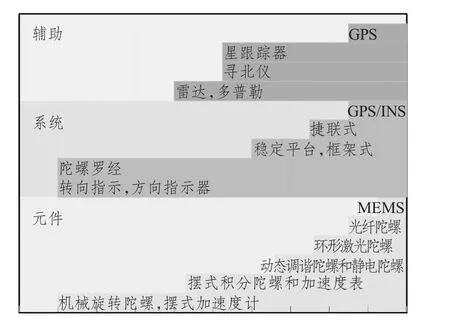
圖1 慣性技術發展歷史Fig.1 Inertial technology insertion history

表1 慣性傳感器應用級別Tab.1 Inertial sensor application grades
現在市場上已經提供民用級的MEMS,其中很多可以與GPS進行組合導航。也有很少一部分接近戰術級應用的全 MEMS IMUs(Honeywell,Atlantic Inertial Systems(前身為BAE),Northrop Grumman/LITEF公司都在生產)。近幾年,民用級的MEMS系統角速度敏感精度為1°/h,加速度敏感精度為幾百μg,但還沒有產品化。一旦產品化,在不遠的將來MEMS將會在戰術級應用領域占領RLGs和IFOGs的市場。
1 MEMS加速度計
MEMS加速度計通過2種方式敏感加速度:1)檢測鉸接或者撓性安裝的元件質量在加速度作用下引起的電容或者壓電變化;2)由于加速運動引起振動元件張力變化,導致振動元件振動頻率變化,通過檢測頻率變化檢測加速度。前者包括擺式或橫向加速度計,后者包括諧振加速度計或振動橫梁式加速度計 (Vibrating Beam Accelerometer,VBA)。MEMS擺式加速度計廣泛應用在戰術級到導航級的領域。VBA或諧振加速度計有潛力應用在更高領域。
1.1 位移式MEMS加速度計
圖2為典型的垂向位移式MEMS加速度計,鉸接的擺式質量元件懸掛在玻璃襯底的撓性彈簧上,當有加速度時,該元件可垂直于平面轉動。通過檢測位于絕緣襯底上2個電極間電容的變化即可檢測加速度。在1g加速度作用下,質量元件轉動角度約為70 μrad,也就是電極間距離發生3×10-8m的變化,電容變化為12fF(10-15F變化)。對于100 μg~15 g動態范圍,要求電極間距離變化分辨率達到3×10-12m,或者22.5個電子充電的變化。
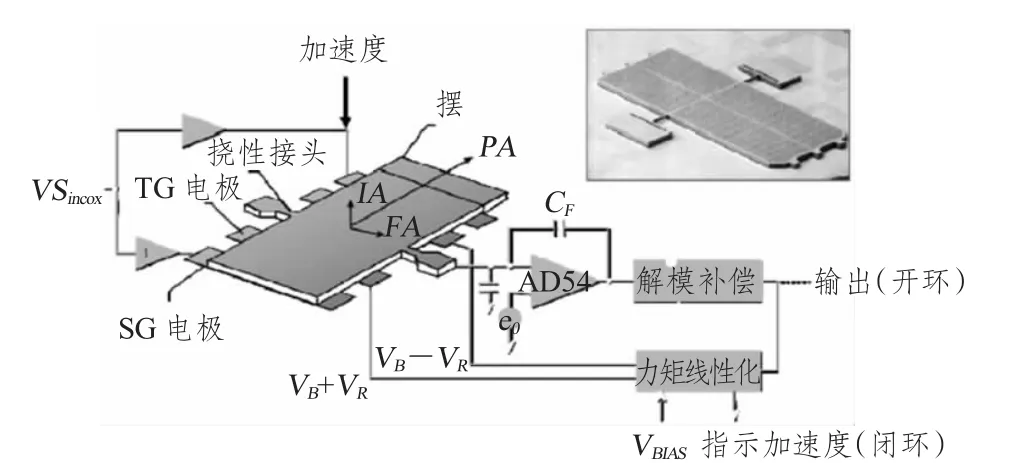
圖2 下擺式MEMS加速度計Fig.2 MEMS Pendulous Accelerometer
Northrop Grumman公司制造的SiACTM就是這種加速度計的代表,Northrop Grumman公司已經制造了20000個,發展了戰術和導航2種級別,而且已經得到廣泛應用,如AMRAAM,GMLRS,以及指揮直升機。Honeywell公司、瑞士 Colibrys公司、MEMS應用公司、SiliconDesign公司、英國Sherborne傳感器公司和德國Bosch公司等公司都生產類似產品。
圖3為典型平面式位移加速度計,通過檢測梳狀手指間的電容變化測量質量元件的位移。這種加速度計對平面 (橫向)方向的加速度比對垂向的加速度更加敏感。垂向和橫向的加速度計可以組合成三軸加速度計。
AnalogDevice公司生產的 ADXL150和ADXL250加速度計是平面位移式加速度計的典型代表。ADXL250可以測量2個方向的加速度,噪聲水平為,精度為10 ~50 mg。
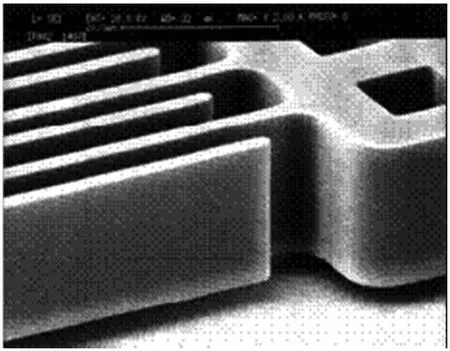
圖3 平面位移式加速度計Fig.3 In-plane accelerometer
位移加速度計可以在開環或閉環模式中工作。Colibrys公司[1]已經報告了高性能的RS9000系列加速度計,該系列加速度計工作在開環模式,既有平面式,也有垂向式。2種全部由硅制造而成,垂向式在上下2個電極之間懸掛了1個質量元件。工作零偏穩定性約為120 μg,零偏重復性為1 mg,標度因數精度為400 ppm,校正精度為65 μg/g2。1個溫度傳感器和特殊應用集成電路集成在傳感器內,在線完成4階溫度補償。Colibrys公司[2]還展示了采用σ-δ 5階補償的同類加速度計,經過σ-δ 5階補償后,其輸出線性度得到顯著提高,并大大減小振動誤差。
Hughes Research實驗室、斯坦福大學以及其他機構發展的隧道加速度計是垂向位移式加速度計的一種,這種加速度計具有超高的靈敏度。圖4為隧道加速度計的概略圖。
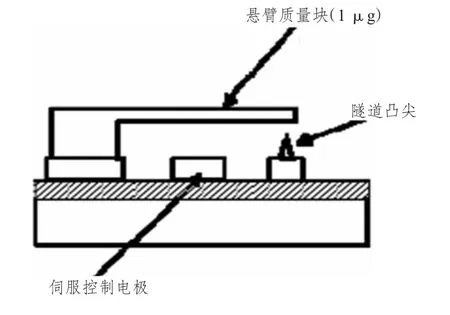
圖4 MEMS隧道加速度計Fig.4 MEMS Tunneling Accelerometer
控制電極通過靜電作用使懸臂轉向隧道位置(<1 um,約20 V)。伺服機構控制隧道凸點與懸臂之間的間隙保持穩定,從而穩定隧道電流(約1nA)。當有加速度時,電極間的電壓就會發生變化。這種加速度計的分辨率可以達到10-9g,但需要低頻諧振質量元件和亞埃級分辨率的信號讀取元件。最新制造的隧道加速度計分辨率達到了20 ng/,工作頻率為 5 Hz~1.5 kHz[3],其閉環動態范圍超過90 dB。但是,在未經環路改進的情況下,大加速度敏感能力還是較低 (約1mg)。中國發展的隧道加速度計[4]在1~100 Hz的工作頻率下,分辨率達到
1.2 諧振式MEMS加速度計
諧振式加速度計包括VBAs,既有平面式,也有垂向式。諧振加速度計通過檢測質量元件加速運動時,諧振臂諧振頻率的變化來測量加速度,而不是檢測質量元件的位移。諧振頻率的變化可以通過檢測電容或者壓電而得到。當存在大壓力作用于平衡臂或者撓性物體時,通常選用壓電諧振器。當撓性物體由于加速運動發生彎曲,也會引起諧振頻率變化。一些壓電諧振加速度計包括:美國Systron Donner公司的諧振石英加速度計 (VQA);Kearfott公司的硅微振臂式加速度計;Honeywell公司的SiMMA加速度計;Onera公司的差分慣性振動加速度計。Onera公司的差分慣性振動加速度計的設計很巧妙,通過設計一個機械隔離系統,將振臂和安裝基座隔離,從而保護活動部件不受熱壓力影響,這個熱壓力是由于石英和相關材料熱擴展效應不同而引起[5]。Onera的差分慣性振動加速度計的零偏穩定性大約為100 μg。
目前2種最高精度的MEMS加速度計均為MEMS諧振加速度計:Draper實驗室的硅擺動加速度 計 (silicon oscillate accelerometer,SOA)和Honeywell的諧振臂式加速度計 (SRBA)。SOA通過檢測電容測量頻率變化,在封閉實驗室環境,其精度達到1 μg,標度因素穩定度達到1 ppm[6],速度隨機游走 (-0.5斜坡)為加速度計尺寸約1立方英寸。SRBA通過高純度的單晶石英材料的壓電效應讀取頻率變化[7]。
1.3 靜電懸浮MEMS加速度計
靜電懸浮加速度計消除了需要彈性機械支持的限制。理論精度非常高。制造精度降低,可以更加靈活地調整加速度計的帶寬和靈敏度,且無需重新設計撓性部件。另外一個顯著優點是可以敏感3個軸向的加速度。主要障礙在于控制回路復雜。
發展懸浮技術的研究機構包括英國大學、伯克利傳感器和執行器中心。圖5為南安普敦大學研制的圓盤懸浮裝置,其中圓盤位移通過檢測電容和閉路靜電力獲得[8]。Ball半導體、Tokinec公司和Tokohu大學開發了一種懸浮球體。圖6為1.2 mg的球形質量元件,內置電極直徑為1 mm。球的位置通過檢測電容獲得,閉路靜電力控制球的位置。在MEMS制造過程,球和外殼的距離通過在多晶硅的外殼內側刻蝕而成。為達到太空中測量微重力的性能,靜電懸浮加速度計的噪聲水平必須優于
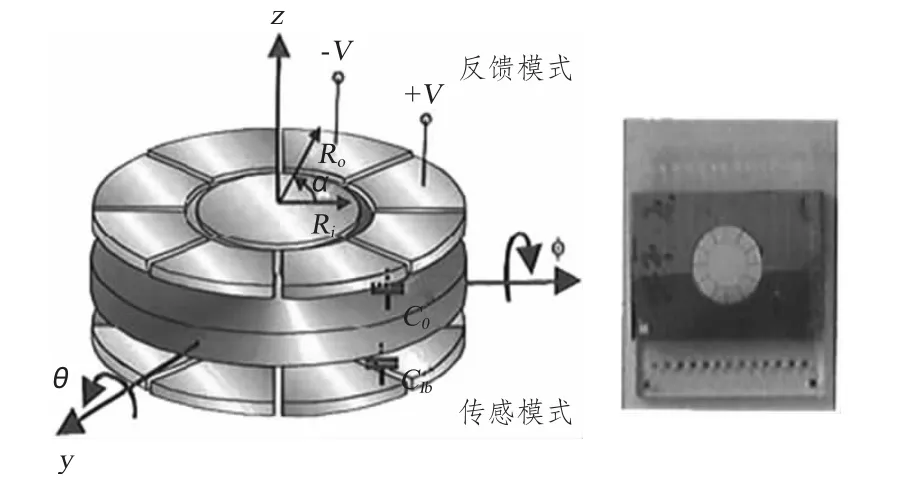
圖5 靜電懸浮圓盤裝置Fig.5 Levitated disk

圖6 靜電懸浮球Fig.6 Levitated 1 mm dia.sphere
2 MEMS陀螺
對于MEMS慣性系統而言,獲得精度合適的陀螺比加速度計更加困難。科里奧利效應是制造振動陀螺的理論基礎。原理上,一個質量元件在平面內做正弦振動時,如果該平面同時以角速度Ω做旋轉運動,則在科里奧利效應的作用下,質量元件將垂直于平面做正弦振動,振幅與Ω成正比關系。通過測量科里奧利效應作用下的運動計算角速度Ω。所有的石英和硅制造科里奧利振動陀螺儀(Coriolis Vibratory Gyros,CVG)都是基于這個原理。基本上所有的MEMS CVG可以分為振動臂式、振動盤式和環形諧振框式3類。全世界已經有大量使用和正在發展的 MEMS CVG[9-13]。MEMS IMUs 的性能主要受限于陀螺的性能,目前MEMS陀螺的靈敏度為5~30 °/h。
2.1 MEMS振動臂式 (音叉式)陀螺
1990年,Systron Donner公司開始為美國空軍“小牛”導彈制造18000只石英速率陀螺,期限2年。1990年中期,新的技術用來大批量生產低成本的偏航角速率傳感器,這些傳感器最早于1997年應用在凱迪拉克汽車上。圖7為Systron Donner公司最為知名的H形石英壓電陀螺。這種陀螺為平面陀螺,敏感圓盤上的音叉角速度。到2008年,每天可以制造的這種陀螺超過40000只。后來還發展了應用在智能彈藥上的高-g陀螺。一個6自由度的IMU,包含3個陀螺和3個振動加速度計,大約1992年或稍晚,數字石英IMU(Digital Quartz IMU)誕生。DQI被嵌入到 Rockwell的 C-MIGITS中[14],Systron Donner公司擁有制造權。
圖7 Systron Donner公司生產的H形石英壓電陀螺Fig.7 Systron Donner quartz rate sensor
Onera公司的振動積分陀螺 (Vibrating Integrated Gyro,VIG)為振動系統采取了特殊的隔離裝置 (如同DIVA加速度計一樣),以減少結構外的能量損耗。100 Hz帶寬下,輸出噪聲為0.01°/s/Sagem公司的Quapason陀螺有4個凸尖伸出基座,以減少輸入到輸出的交叉耦合信號。
2.2 振動盤式MEMS陀螺
圖8為Draper實驗室研制的音叉-2形陀螺(Tuning Fork Gyro-2,TFG-2),包含2個平面狀硅質元件,這2個平面狀硅質元件通過折疊臂懸掛在玻璃襯底上,可以在平面內做180°振動。尺寸在300×400 μm量級上。由于科里奧利作用力引起的平面外的運動可以通過檢測質量元件和襯底之間的電容變化得到,這種MEMS陀螺的一個典型性能指標是:平面內1 rad/s的輸入角速度引起作用在質量元件上的力大約為9×10-8N,在垂直于電極方向最大有1×10-9m的峰值位移,3 aF(10-18F)的電容變化。1°/h的角速度分辨率需要能夠檢測出5×10-15m的位移和大約每個運動周期0.25電子的電量變化。Draper實驗室已經將這種技術轉讓給Honeywell公司。性能測試數據表明最近的TFG的敏感范圍在3~50°/h(3σ補償),工作溫度范圍為-40℃ ~85℃,振動輸入可到12000 g。這些性能已經在增程制導彈藥和所有的抗擊彈藥高級技術制導炮彈中得到驗證[15]。Draper/Honeywell TFG系列陀螺設計已經經過驗證,這種陀螺可以應用在高-g場合,而且性能在不斷增強,制造技術也在提高。振動平面技術已經在Honeywell的HG1900,1930,1940 IMUs中得到應用,1940 IMUs尺寸為2立方英寸。
圖8 Draper實驗室研制的音叉-2形陀螺Fig.8 Top view of MEMS vibrating plate gyroscope
許多平面振動式陀螺都是梳狀驅動的,這種梳狀驅動裝置由加利福利亞大學伯克利分校發明。梳狀驅動裝置采用多種結構設計以減少敏感元件與驅動之間的耦合效應,如平面式、垂向式及振動圓盤式。研究表明性能最好的厚度在50~100 μm之間。MEMS制造上的瑕疵很容易導致不必要的性能誤差,因此關鍵在于制造技術的進步,且設計對制造工藝要求不是那么苛刻的MEMS陀螺,從而提高性能,降低成本。Analog Device公司已經制造出民用的ADXRS陀螺,其敏感軸和驅動軸都平行于襯底,這種陀螺可以工作在氣體環境中,但性能則有限。
另外一些不依賴梳狀驅動的平面振動式MEMS陀螺也在發展中。這種設計不要求梳齒間具有很窄的間隙和很高的制造精度。JPL實驗室的MEMS陀螺[16],采用2自由度的4片三葉草形狀元件懸掛在4個彈簧上,包括1個垂直的柱狀質量元件,通過繞位于三葉草葉片平面內的一根軸做搖擺運動來驅動。這是一種垂向式陀螺 (即測量的是垂直于三葉草頁面的軸向角速度)。日本正在發展一種雙萬向輪結構驅動和敏感電磁感應的MEMS陀螺[17]。挪威Sensnor公司正在發展SAR500型高精度MEMS蝴蝶陀螺,其設計性能為:ARW為零偏穩定性為 0.04°/h,零偏重復性為 0.1°/h[18]。SAR500陀螺的敏感軸位于上下兩層敏感平面內,這種設計可以提高靈敏度,還可以調節敏感元件和驅動之間的諧振,以便進行動態積分補償。
2.3 環形諧振MEMS陀螺
環形諧振MEMS陀螺有一個優點:環形結構吸收了平面內全部敏感和驅動振動能量。但也存在一個缺點:環內振動質量低,因此標度因素小。圖9是一個由密歇根大學研制的單晶硅環形振動陀螺[19]。環振動頻率為27 kHz,直徑為2.7 mm,寬50 μm,寬150 μm。環由靜電力驅動振動,靜電力通過平面內的電極施加,振動軌跡為橢圓形,是第一撓性模式振動。Z軸方向的角速度引發科里奧利效應,這將使能量從第一撓性模式轉換到第二撓性模式,模式角為45°。第二撓性模式振動幅值通過檢測電容得到。由于制造誤差引起的頻率失調可以通過平衡電極進行電子化補償。這種陀螺的標度因素為132 mv/deg/s,分辨率為7.2°/h,輸出噪聲為10.4°/h/Hz0.5。
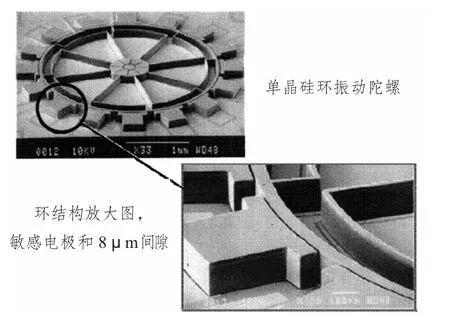
圖9 密歇根大學研制的單晶硅環形振動陀螺Fig.9 U.Michigan vrating rng groscope
BAE公司發展了一種環形諧振器的硅振動結構陀螺,環形諧振器由兼容輻條支撐。諧振器環的科里奧利運動通過檢測磁場變化得到,環中間安裝了一個磁鐵。這種感應式諧振環形陀螺[20]成功應用在姿態參考系統中,用來控制制造標準、中程反坦克制導導彈,以及其他軍事系統。一種全硅電容式振動環形陀螺也在發展中。BAE公司的諧振環形陀螺技術經由大西洋慣性系統公司 (Atlantic Inertial Systems,AIS)授權,成功應用在 SiIMU02和SiNAV IMUs中。AIS聯合日本Sumitomo制造公司生產的硅傳感系列陀螺,以每個月幾千只的速度生產民用級別的環形諧振陀螺。DMU02這種6自由度動態測量裝置已經應用在賽格威的載人運輸機,在CRS09的穩定系統中取代了FOG,也可以與GPS進行組合導航。
2.4 其他非傳統MEMS陀螺
有跡象表明,傳統的CVG陀螺難以超過戰術級應用精度,因此科研人員正在研究其他的傳感技術。其中之一就是Draper實驗室于2004年開始研究的導航級積分微陀螺 (navigation grade integrated micro Gyro,NGIMG)。NGIMG將設計成芯片式的陀螺,ARW為0.001°/h,零偏穩定性為0.01°/h,標度因素穩定性優于50 ppm,帶寬為300 Hz,功耗小于5 mW。早期選用了懸浮轉子技術、微核磁共振技術和石英圓盤諧振技術等。
Draper實驗室的另外一項創造是微標度速率積分陀螺 (microscale rate integrating gyro,MRIG),這項研究始于2009年。這項技術將克服當前MEMS陀螺只能提供角速度而不能提供角度的限制。雖然MRIG已經完成概念設計,但是這項創造需要理論科學、制造、元件和系統方面的技術革命,這些技術革命還不包括現有的技術進步。歐洲空間局資助了BAE公司、德國Bosch公司、EADS CRC公司、LITEF公司、法國Sagem公司、挪威SensoNor公司及法國Thales等公司進行市場和可行性研究,其目標是研制零偏穩定性為0.1°/h的MEMS陀螺。能大量生產優于戰術級精度的MEMS陀螺還需要許多年。
2.5 多軸陀螺及加速度計芯片
將平面式傳感器和垂向式傳感器集成到1塊芯片上是進一步減小體積的一個研究方向。利用這種芯片式傳感器,IMU的尺寸可以控制在0.2立方英寸內。這種IMU可以應用于個人導航和制導子彈。芯片式傳感器將促進體積減小和成本的降低。
3 展望
慣性傳感器技術成熟度如圖10所示。圖中右下角顯示的是高成熟度的技術。從圖中可以看出,沒有新的傳感器技術出現在接近水平面位置,對于傳感器設計者而言下一步在哪?那就是小型化、低成本。因此未來數年將持續進行MEMS傳感器小型化和性能提升。圖11展示了慣性傳感器技術將來可能應用的領域。
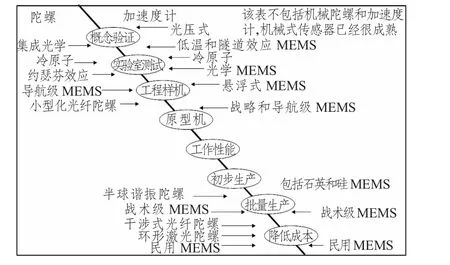
圖10 慣性傳感器技術成熟度Fig.10 Inertial sensor technology maturity
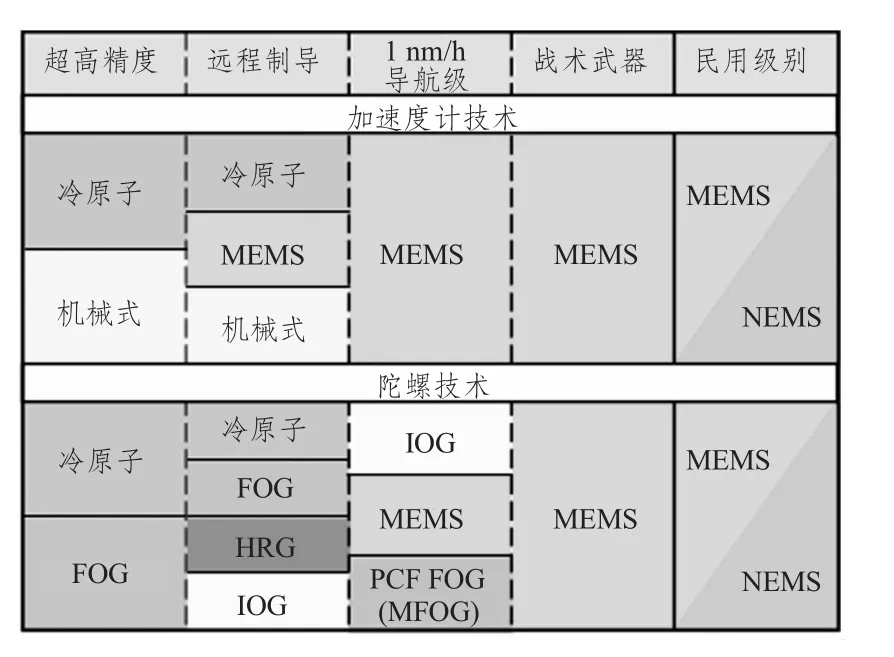
圖11 慣性傳感器技術將來可能應用的領域Fig.11 Future applications for inertial sensor technology
從圖10可以看出,在不遠的將來,FOGs將滲透進傳統上由RLGs占領的領域。然而,分辨率為1°/h的2立方英寸的MEMS IMU的持續發展最終將占領戰術級應用領域80%的份額,并向導航級應用領域滲透。
[1]STAUFFER J M,et al.RS9000 a novel MEMS accelerometer family for mil/aerospace and safety critical applications[M].IEEE/ION PLANS,Indian Wells,CA,2010.
[2]DONG Y,et al.High performance inertial navigation grade sigma-delta MEMS accelerometer[M].IEEE PLANS,Indian Wells,CA,2010.
[3]LIU C.KENNY T.A high-precision,wide-bandwidth micromachined tunneling accelerometer[J].IEEE Journal of Microelectromechanical Systems(ISSN 1057 -7157),2001,10(3):425 -433.
[4]DONG H,et al.A novel out-of-plane MEMS tunneling accelerometer with excellent Low frequency resolution[M].1st IEEE International Conference on Nano/Micro Engineered and Molecular Systems,Zhuhai,China,2006.
[5]LE TRAON O,et al.The DIVA accelerometer and VIG gyro:two quartz inertial MEMS for guidance and navigation applications[M].IEEE/ION PLANS,Indian Wells,CA,2010.
[6]HOPKINS R,et al.The silicon oscillating accelerometer:a high-performance MEMS accelerometer for precision navigation and strategic guidance applications,ION 61st Annual Meeting,Cambridge,MA,2005.
[7]BECKA S,et al.A high reliability solid-state accelerometer for ballistic missile inertialguidance,AIAA GN&C,Honolulu,HI,2008.
[8]HOULIHAN R,KRAFT M.Squeeze film effects in a MEMS levitated proof mass[J].Journal of Micromechanics and Microengineering,2005,15:893 -902.
[9]YAZDI N,AYAZI F,NAJAFI K.Micromachined inertial sensors[J].Proc.of the IEEE,1998,86(8).
[10]El-SHEIMY N,NIU X.The promise of MEMS to the navigation community[M].Inside GNSS,2007.
[11]DEAGOSTINO M,et al.Performance comparison of different MEMS-based IMUs[J].IEEE/ION PLANS,Indian Wells,CA,2010(5).
[12]ALLEN J.Micro-system inertial sensing technology overview[M].Sandia Report SAND2009 -3080,2009.
[13]SHKEL A.Micromachined gyroscopes:challenges,design solutions,and opportunities[M].Smart Structures and Materials 2001,Proceedings of SPIE,2001.
[14]JAFFE R,ASHTON T,MADNI A.Advances in ruggedized quartz MEMS inertial measurement units[M].IEEE/ION PLANS,Coronado,CA,2006.
[15]BARBOUR N,et al.Evolution of low-cost MEMS inertial systems,NATO SET Symposium on Emerging Military Capabilities Enabled by Advances in Navigation Sensors,Istanbul,Turkey,October 2002.
[16]BAE S,HAYWORTH K,YEE K,K,et al.High performance MEMS micro-gyroscope,Proc.SPIE,Design,Test,Integration, andPackagingofMEMS/MOEMS 2002,Cannes,France,2002.
[17]KASUZUKE M,et al.Design,fabrication and operation of a MEMS gimbal gyroscope[J].Sensors and Actuators,Vol.A121,2005(5).
[18]BLIXHAVN B,et al.SAR500-A novel high precision gyroscope,Symposium Gyro Technology,Stuttgart,September,2010.
[19]HE G,NAJAFI K.A single-crystal silicon vibrating ring gyroscope,MEMS 2002-15th IEEE International Conference on MicroelectromechanicalSystems,LasVegas,NV,2002.
[20]GRIPTON A.The application and future development of a MEMS SiVSG for commercialand military inertial products,IEEE PLANS,Palm Springs,CA,2002,4.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
