塑料模具的虛擬裝配研究
2014-08-29 17:00:32
大眾科技 2014年3期
(安徽機電職業技術學院,安徽 蕪湖 241000)
VRML是網絡上基于虛擬的一種現實建模語言,被稱為第二代網絡語言,具有三維性、交互性、分布式集成性和逼真性等特點[1-4],通過模擬仿真、構建虛擬現實行為,從而模擬機械部件尤其是復雜機械模型如模具的虛擬裝配,進而幫助學員熟悉復雜部件之間的結構及其從屬、裝配關系。
UG軟件當前比較流行的三維參數化設計軟件,世界范圍內使用者較多,也是目前較先進的計算機輔助設計、分析和制造軟件中的一員,成為UGS產品家族中應用最為廣泛的設計軟件[5-6]。UG軟件提供了VRML軟件的接口,本文先通過UG軟件完成產品的模具設計,通過提取裝配體信息利用 VRML的環境最終完成動態裝配的演示動畫。下面以教學中的典型產品的模具為例說明以上過程。
1 VRML靜態模型的建立
首先,在UG NX軟件中對產品進行模具設計,包括澆口套、定模座板、定模板、動模座板、動模板、墊板、支承板、復位桿、推桿、推桿固定板、推板、模仁等。然后轉換模具零件的格式,最終模具如圖1所示。
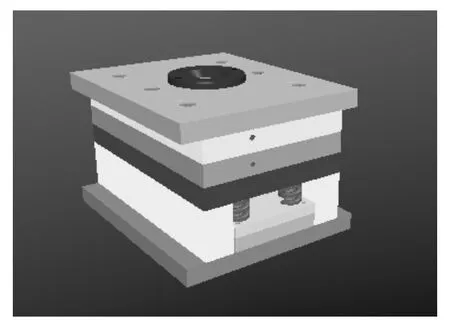
圖1 模具裝配體
接下來,將UG NX的prt格式的文件導出為VRML V2.0版的wrl格式文件,然后在VRML文件編輯器VrmlPad中讀入wrl文件,再對此對象進行場景渲染或動畫制作等等。但是對于部分結構復雜程度高的裝配體,如果直接將裝配體文件整體導出,在操作和動畫處理、渲染上難度較大。一般的處理方法是:在三維軟件中的裝配狀態下,單一的將每一個零件獨立導出,但并不改變其在裝配體中的位置,依次建立新的wrl格式文件,在利用Inline命令將零件串聯起來。這個時候,基本上就不用調整每個零件的具體位置,操作簡單,效果較好。
2 虛擬現實裝配的關鍵技術
2.1 虛擬裝配路徑的規劃
實現虛擬裝配,關鍵是裝配順序和裝配路徑的確定。如何確定?一般來說,首先按照從部件-組件-零件的順序進行劃分,即先將大的裝配體劃分為一個個小的裝配體,小裝配體我們稱之為組件,在分解各個組件的裝配順序,裝配拆裝的時候逆流而上,從而得到一個基本的裝配框架。而拆裝時需要注意空間干涉,從而避免零件的犬牙交錯,顯得拆裝過程更接近現實。當然,不同的裝配體拆裝的順序各有不同。例如,螺釘等部件在拆裝時,要模擬左旋或右旋的旋轉動作,而有些零部件只做平面移動。在路徑規劃中,當需要左旋或右旋等旋轉運動則使用旋轉插補器,平面移動則使用位置插補器進行設置。通過虛擬規劃,進而最大程度的模擬拆裝,使得整個模擬系統更接近真實。
2.2 邏輯控制
根據裝配順序和規劃好的裝配路徑對模具的裝配動畫進行邏輯控制。通過時間插補器對時間進行控制和動畫是否循環,與其對應的位置插補器也是對模具裝配動畫進行邏輯控制的一部分。
3 模具動畫設計
3.1 上模的動畫設計
上模靜態模型的建立是和模具裝配圖靜態模型的建立一樣的。下圖是已經裝配好的上模。圖2是已經裝配好的上模。上模的移動路徑圖見圖3。
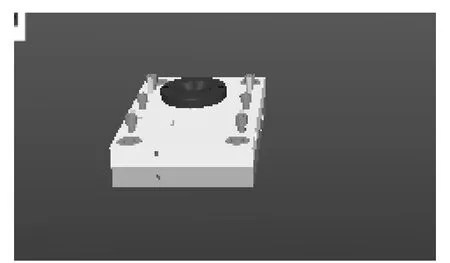
圖2 裝配好的上模
其動畫設計程序如下:
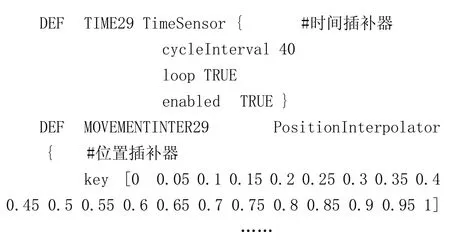
上面只是一個零部件的動畫的設計,其余上模零部件的設計都是和這一樣的。需要注意的是在設置移動位置是其位置要與時間插補器的時間是一一對應的。
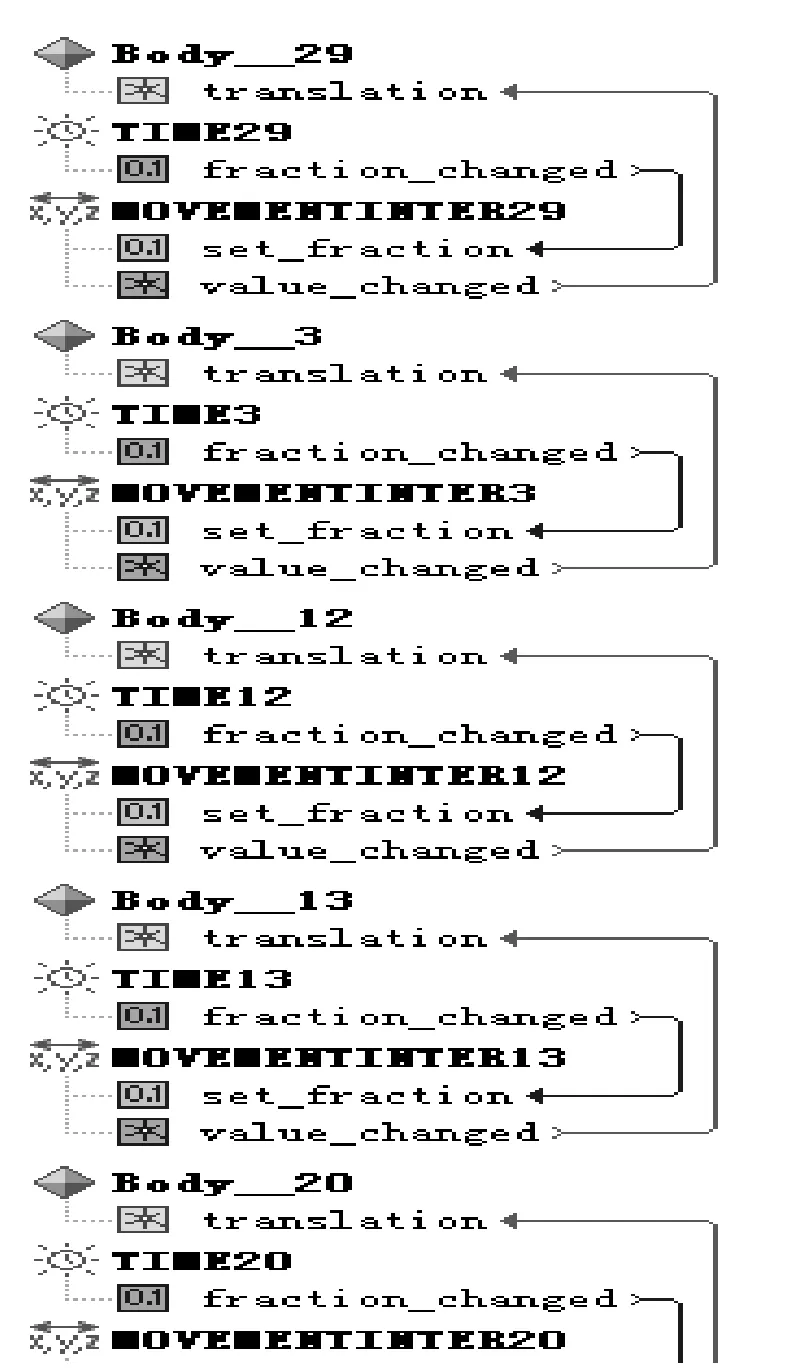
圖3 上模的移動路徑圖
3.2 下模靜態模型的建立
下模靜態模型的建立和上模靜態模型的建立是完全一樣的,只是裝配的零件不同而已。
3.3 產品的動畫設計
產品的動畫設計相對容易,只是將其靜態模型導入之后,在對其進行旋轉控制。
3.4 模具裝配體的動畫設計
整個模具的動畫設計也就是將上模的動畫、下模的動畫和產品的動畫用內聯命令Inline連接起來,最后再對上模和下模整體做動畫設計。
其動畫設計程序如下:
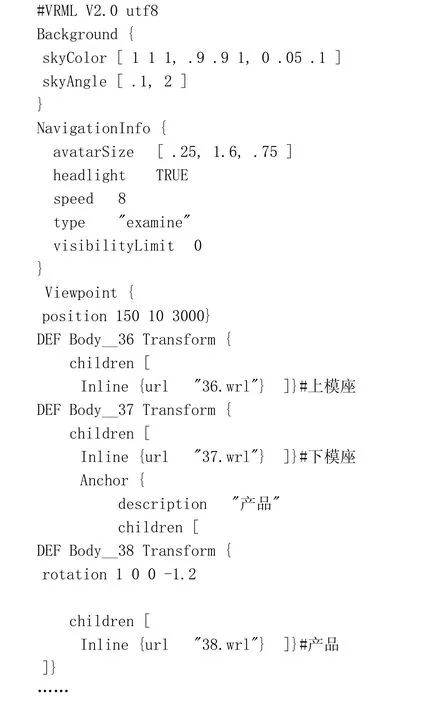
其移動路徑圖如圖4。
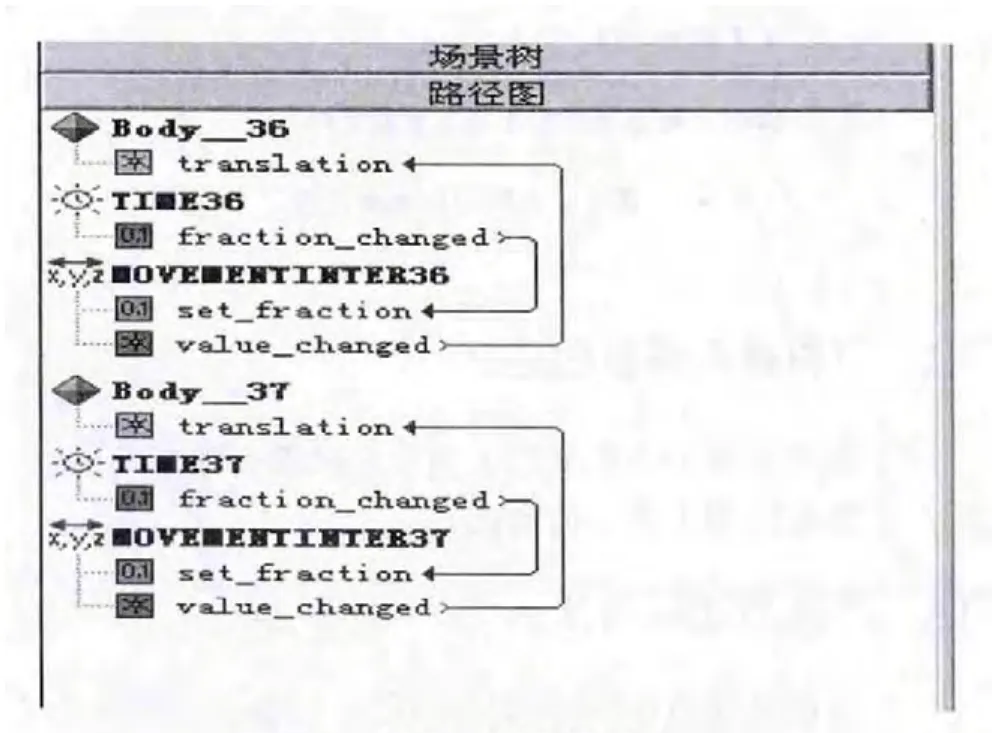
圖4 裝配體移動路徑圖
整個模具的動畫見圖5。
圖5 模具裝配動畫
4 總結
隨著計算機技術高速發展,計算機輔助教學在教學領域里發揮著越來越重要的作用。為了使模具裝配工人更好地熟悉,掌握模具的內部結構和工作原理,用三維動畫來展示模具零部件的三維模型和裝配過程。這樣可以縮短培訓人員的學習時間,降低培訓成本。
[1]胡小強.虛擬現實技術[M].北京:北京郵電大學出版社,2005:36-40.
[2]胡小強.虛擬顯示技術與運用[M].北京.高等教育出版社,2002:110-113.
[3]張冶,洪雪.UnigraphicsNX三維工程設計與渲染教程[M].北京.清華大學出版社,2004:187-190.
[4]宋春華,王隆鵑.UG 工業設計實例[M].北京.機械工業出版社,2004:78-80.
[5]嚴子翔編著.VRML虛擬現實網頁語言[M].清華大學出版社,2001:90-91.
[6]賽博科技工作室.VRML于 Java編程技術[M].人民郵電出版社,2002:64-65.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小哥白尼(趣味科學)(2021年12期)2021-03-16 05:40:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
小學科學(學生版)(2020年10期)2020-10-28 07:52:18
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2019年22期)2019-12-07 05:28:56
新聞傳播(2018年3期)2018-05-30 07:01:39
光學精密工程(2016年6期)2016-11-07 09:07:19
學生天地(2016年9期)2016-05-17 05:45:06
核科學與工程(2015年4期)2015-09-26 11:59:03