機(jī)器人手臂控制系統(tǒng)的設(shè)計(jì)與研究
2014-08-29 05:14:49吳學(xué)禮劉浩南
河北科技大學(xué)學(xué)報(bào) 2014年4期
吳學(xué)禮,劉浩南,許 晴
(1.河北科技大學(xué)電氣工程學(xué)院,河北石家莊 050018;2.河北省生產(chǎn)過程自動(dòng)化工程技術(shù)研究中心,河北石家莊 050018)
機(jī)器人手臂控制系統(tǒng)的設(shè)計(jì)與研究
吳學(xué)禮1,2,劉浩南1,2,許 晴1,2
(1.河北科技大學(xué)電氣工程學(xué)院,河北石家莊 050018;2.河北省生產(chǎn)過程自動(dòng)化工程技術(shù)研究中心,河北石家莊 050018)
機(jī)器人在工業(yè)上已經(jīng)取得了非常大的進(jìn)步,尤其是視覺傳感器的應(yīng)用對(duì)于機(jī)器人的智能化有很大的幫助。基于DMC5480運(yùn)動(dòng)控制卡,通過視覺處理系統(tǒng)實(shí)現(xiàn)了RS232串行通信,設(shè)計(jì)了一套可識(shí)別機(jī)器人手臂的精準(zhǔn)定位系統(tǒng),詳細(xì)研究了控制系統(tǒng)硬件,規(guī)劃了控制系統(tǒng)控制策略,編寫了上位機(jī)操作軟件。最后設(shè)計(jì)了一套帶視覺識(shí)別的象棋機(jī)器人手臂。實(shí)驗(yàn)結(jié)果表明,機(jī)器人手臂可以代替人手功能在工作區(qū)域內(nèi)沿任意軌跡運(yùn)動(dòng)。
視覺識(shí)別;機(jī)器人手臂;DMC5480運(yùn)動(dòng)控制卡;伺服控制
目前,國內(nèi)外學(xué)者很少把機(jī)器人手臂應(yīng)用到中國傳統(tǒng)的娛樂項(xiàng)目上,如中國象棋[1]。而中國國內(nèi)對(duì)娛樂機(jī)器人的開發(fā)與研究也處于起步階段,如何應(yīng)用機(jī)器人手臂代替人的手臂來實(shí)現(xiàn)下棋是本文主要解決的問題。基于以上問題研究了一種基于DMC5480運(yùn)動(dòng)控制卡的開放式結(jié)構(gòu)機(jī)器人控制系統(tǒng),在高速,高精度,多軸聯(lián)動(dòng)等方面具有很大優(yōu)勢(shì),并且加入了視覺識(shí)別部分,功能更加完善,具有很大的優(yōu)越性。
機(jī)器人大多擁有多個(gè)運(yùn)動(dòng)軸,并且大部分是多軸實(shí)時(shí)聯(lián)動(dòng)的運(yùn)動(dòng)控制系統(tǒng)。經(jīng)典的機(jī)器人控制系統(tǒng)大多采用的是封閉式體系結(jié)構(gòu),采用專用的計(jì)算機(jī)結(jié)合單片機(jī)構(gòu)成控制回路[2]。該體系結(jié)構(gòu)下的控制器很難在速度快、精度要求高的條件下完成工作,同時(shí)多軸同步運(yùn)動(dòng)控制也存在技術(shù)難題。除此之外還有一系列缺點(diǎn),包括使用成本大多數(shù)很高,需要很長的開發(fā)周期,很難升級(jí)換代,添加新功能不容易等。以上缺點(diǎn)限制了機(jī)器人的工作場(chǎng)合和應(yīng)用范圍。
1 視覺識(shí)別部分
人類獲得外界的信息有很多種方式,但其中有80%是來自于視覺圖像信息的,主要包括圖像、形狀、文字、視頻等。計(jì)算機(jī)的迅速發(fā)展,使得人們很容易地利用計(jì)算機(jī)來獲取圖像與處理視覺信息[3-8]。圖像處理技術(shù)是一門復(fù)雜的學(xué)科,它包括視覺圖像獲取和對(duì)圖像的加工處理。如今越來越多的人開始關(guān)注視覺圖像技術(shù),圖像技術(shù)大致有3個(gè)層次:圖像處理、圖像分析和圖像理解。對(duì)圖像分割以改善視覺效果是圖像處理主要完成的部分。圖像分析則是把原來以像素描述的圖像轉(zhuǎn)變成簡潔的非圖形式的符號(hào)描述,主要應(yīng)用圖像分割和特征提取。圖像中的目標(biāo)和它們之間的聯(lián)系則是圖像理解所要研究的,其所采用的處理方法大多數(shù)參考人類的思維推理,兩者非常類似。在機(jī)器人視覺伺服的研究中,要用到圖像的分析以及對(duì)圖像的理解,即對(duì)圖像的分割以及對(duì)圖像中目標(biāo)的識(shí)別。
圖像處理與機(jī)器視覺的最基本問題是圖像的分割,其主要的方法是把圖像劃分成若干互不交迭區(qū)域的集合,這些被劃分出來的區(qū)域除了對(duì)當(dāng)前的任務(wù)有意義之外,還非常有助于說明它們與實(shí)際物體之間的某種對(duì)應(yīng)關(guān)系[9]。
實(shí)驗(yàn)中采用RS232串行通信。實(shí)驗(yàn)中的棋子均采用黑色圓柱體鋼制材料代替,直徑50 mm,厚度15 mm。首先建模經(jīng)過二值化預(yù)處理(本文采用的是比較簡單的二值化處理方法),對(duì)RGB彩色圖像灰度化以后,掃描圖像的每個(gè)像素值,像素值小于127的設(shè)為0(黑色),像素值大于等于127的設(shè)為255(白色)[10-13]。該方法的好處是計(jì)算量少、速度快。通過二值化處理獲得工件的RGB值存到存儲(chǔ)器,主要包括工件的R,G,B值,以此為模板,視覺攝像頭到達(dá)工件的上方時(shí)對(duì)其進(jìn)行掃描獲得RGB值,當(dāng)與模板值相差±3時(shí)均認(rèn)為滿足模板要求進(jìn)行抓取。
2 機(jī)器人手臂控制系統(tǒng)硬件設(shè)計(jì)
2.1DMC5480運(yùn)動(dòng)控制卡的概述
實(shí)驗(yàn)中根據(jù)控制臂下棋的動(dòng)作功能需要采用3自由度的運(yùn)動(dòng)方向,即空間坐標(biāo)系X,Y,Z軸。同時(shí)應(yīng)該滿足高速運(yùn)動(dòng),速度可調(diào),運(yùn)行穩(wěn)定,具有一定的智能化,后期擴(kuò)展性強(qiáng)等優(yōu)勢(shì)。因此選用DMC5480運(yùn)動(dòng)控制卡,DMC5480是一款基于PCI總線的高檔脈沖式運(yùn)動(dòng)控制卡,該產(chǎn)品不但采用了雷泰公司自主研發(fā)的運(yùn)動(dòng)控制專用芯片(ASIC),還增加了CPU和RAM,并配置了512段緩沖,使得實(shí)時(shí)處理能力更強(qiáng);同時(shí)在先進(jìn)的軌跡規(guī)劃軟件支持下,實(shí)現(xiàn)了運(yùn)動(dòng)前瞻控制,使其高速軌跡控制性能十分優(yōu)秀。DMC5480還具有許多其他高級(jí)功能,如:在電機(jī)運(yùn)動(dòng)過程中,程序可以根據(jù)不同的條件修改該運(yùn)動(dòng)過程的速度和目標(biāo)位置;可以設(shè)置不同加速度、減速度的梯形、S形速度曲線。
具體硬件系統(tǒng)框圖如圖1所示。
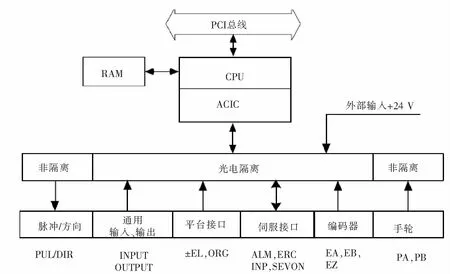
圖1 DMC5480運(yùn)動(dòng)控制卡系統(tǒng)框圖Fig.1 Block diagram of DMC5480 motion control card system
2.2控制系統(tǒng)硬件連接
DMC5480與交流伺服電機(jī)驅(qū)動(dòng)器的連接圖如圖2所示。
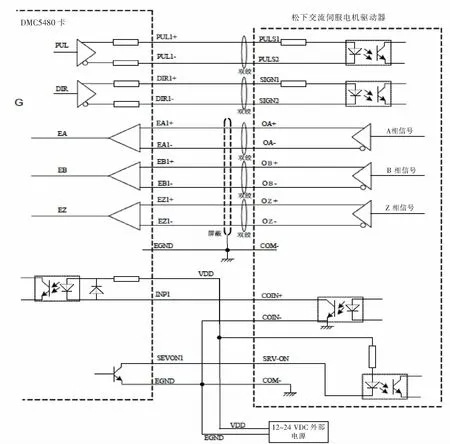
圖2 DMC5480與交流伺服電機(jī)驅(qū)動(dòng)器的連接圖Fig.2 DMC5480 motor drives and AC servo connection diagram
該機(jī)器手臂主要有3個(gè)運(yùn)動(dòng)軸,設(shè)定為X,Y,Z軸,也就是三維坐標(biāo)系。棋盤的坐標(biāo)系與機(jī)械手的坐標(biāo)系X軸Y軸方向一致,只有Z軸是方向相反的,因此只需要將Z軸的運(yùn)動(dòng)方向設(shè)置成負(fù)的就可以了。每一個(gè)軸上面都有一個(gè)伺服電機(jī)來驅(qū)動(dòng),視覺傳感器安裝在Z軸的頂端,在工作區(qū)域內(nèi)識(shí)別物體。由于設(shè)計(jì)的是象棋下棋軟件,所以要有一定工作區(qū)域的設(shè)定,以棋盤為界設(shè)計(jì)一個(gè)長為63 cm,寬為56 cm的活動(dòng)范圍。
3 控制系統(tǒng)的軟件規(guī)劃
上位機(jī)需要調(diào)用DMC5480運(yùn)動(dòng)控制卡里的函數(shù),輸出脈沖給伺服驅(qū)動(dòng)器,驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng),所以為了實(shí)現(xiàn)想要的功能必須編寫相應(yīng)的操作界面,調(diào)用函數(shù)[14]。本設(shè)計(jì)采用VB編寫上位機(jī)界面。棋盤中的甲方乙方均采用一個(gè)機(jī)械手臂來實(shí)現(xiàn)抓取放置,首先在Z軸頂端的視覺傳感器識(shí)別到工件時(shí)傳遞給上位機(jī),通過分析調(diào)用運(yùn)動(dòng)函數(shù),運(yùn)動(dòng)控制卡就會(huì)輸出相應(yīng)的脈沖數(shù),驅(qū)動(dòng)電機(jī)運(yùn)動(dòng),再通過速度插補(bǔ)等控制實(shí)現(xiàn)定位。抓取工件的時(shí)候,主要是Z軸向下運(yùn)動(dòng)接近工件時(shí)打開電磁鐵吸取工件,然后上升放置到指定的地點(diǎn)。以上運(yùn)動(dòng)均通過上位機(jī)軟件操作。
3.1速度控制
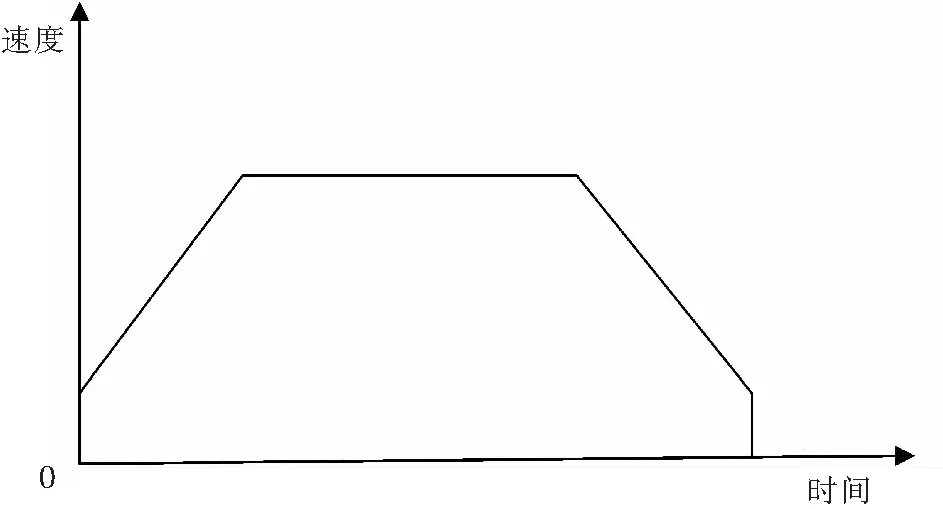
圖3 梯形速度曲線Fig.3 Trapezoidal speed profile
運(yùn)動(dòng)速度之所以要按梯形曲線變化,是因?yàn)殡姍C(jī)軸和負(fù)載具有慣性,不可能在瞬間內(nèi)達(dá)到指定速度,必須有一個(gè)加速過程,減速時(shí)也一樣,否則電機(jī)會(huì)因?yàn)樗查g力矩不足而出現(xiàn)丟步、過沖(步進(jìn)電機(jī))或振蕩(伺服電機(jī))現(xiàn)象[15]。速度控制如圖3所示。
3.2加減速過程的距離(脈沖數(shù))計(jì)算
對(duì)于梯形速度曲線運(yùn)動(dòng),加/減速段的運(yùn)動(dòng)距離(脈沖數(shù))可按以下公式計(jì)算:
Dacc =(1/2)×(Max_Vel×Max_Vel)/ acc,
Ddec =(1/2)×(Max_Vel×Max_Vel)/ dec。
其中:Dacc,Ddec分別為加速段距離和減速段距離;Max_Vel為運(yùn)行速度;acc,dec為加速度和減速度。
3.3多軸聯(lián)動(dòng)
所謂同時(shí)執(zhí)行是在程序中順序調(diào)用函數(shù),因?yàn)槌绦驁?zhí)行速度很快,在瞬間幾個(gè)電機(jī)都開始運(yùn)動(dòng),給人的感覺就是同時(shí)開始運(yùn)動(dòng)。多軸聯(lián)動(dòng)在各軸速度設(shè)置不當(dāng)時(shí),各軸停止時(shí)間不同、在起點(diǎn)與終點(diǎn)之間運(yùn)動(dòng)的軌跡也不是直線。聯(lián)動(dòng)示意圖如圖4所示。
為了解決運(yùn)行軌跡不是直線的問題就需要對(duì)X軸和Y軸的速度進(jìn)行調(diào)試與匹配,經(jīng)過多次實(shí)驗(yàn)得出的結(jié)論是兩軸的速度之差不能大于5 000個(gè)脈沖。
3.4二軸直線插補(bǔ)
二軸直線插補(bǔ)如圖5所示。
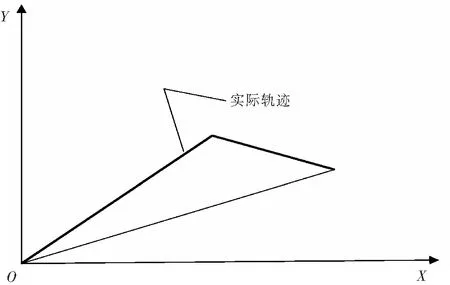
圖4 二軸聯(lián)動(dòng)示意圖Fig.4 Two-axis schematic
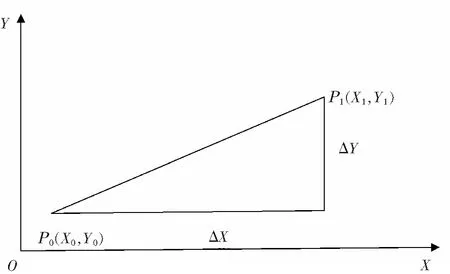
圖5 二軸直線插補(bǔ)Fig.5 Two-axis linear interpolation
二軸直線插補(bǔ)從P0點(diǎn)運(yùn)動(dòng)至P1點(diǎn),X,Y軸同時(shí)啟動(dòng),并同時(shí)到達(dá)終點(diǎn);X,Y軸的運(yùn)動(dòng)速度之比為ΔX∶ΔY;二軸合成的矢量速度為

通過將以上各部分聯(lián)系起來可以給出控制系統(tǒng)的軟件控制方案。
4 視覺象棋機(jī)器手臂的實(shí)現(xiàn)
基于以上硬件與軟件的研究,最后設(shè)計(jì)了一個(gè)視覺識(shí)別的象棋機(jī)器人手臂。該手臂可以模擬人的手臂,當(dāng)操作者在上位機(jī)操作下象棋的時(shí)候,硬件部分就可以迅速找到該棋子并抓取放置到指定位置。
上位機(jī)操作界面如圖6所示。
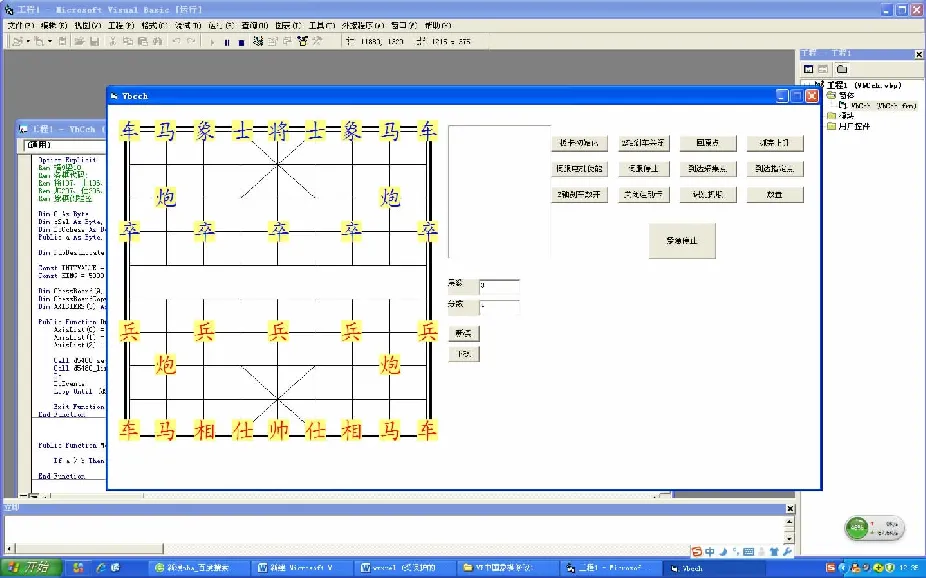
圖6 象棋操作界面Fig.6 Chess interface
5 結(jié) 語
采用DMC5480系列新一代多軸運(yùn)動(dòng)控制器構(gòu)造機(jī)器人控制系統(tǒng),可以很好地解決控制器在速度快、精度要求高的條件下完成工作的問題;同時(shí)也解決多軸同步運(yùn)動(dòng)控制的技術(shù)難題;同時(shí)還可以輕松地給機(jī)器人增加外部傳感器和網(wǎng)際控制功能。其是新一代機(jī)器人控制器的主流發(fā)展方向,也為解決一些高難度機(jī)器人工程項(xiàng)目提供軟硬件技術(shù)支撐。
/
[1] 曹 健.圖像目標(biāo)的表示與識(shí)別[M].北京:機(jī)械工業(yè)出版社,2012. CAO Jian.Representation and Recognition of Image Target[M].Beijing:China Machine Press,2012.
[2] 王業(yè)琴,王克奇,白雪冰,等.計(jì)算機(jī)視覺木材表面色差檢測(cè)的研究[J].林業(yè)科技,2005,30(2):36-38. WANG Yeqin,WANG Keqi,BAI Xuebing,et al.Research on wood surface chromatism in computer visual[J].Forestry Science & Technology,2005,30(2):36-38.
[3] 徐 琨,李 燕.基于分塊顏色矩和紋理特征的圖像檢索方法[J].西安石油大學(xué)學(xué)報(bào)(自然科學(xué)版),2005,20(2):77-79. XU Kun,LI Yan.An image search approach based on local main color feature and texture feature[J].Journal of Xi′an Shiyou University(Natural Science Edition),2005,20(2):77-79.
[4] 楊紅菊,張 艷,曹付元.一種基于顏色矩和多尺度紋理特征的彩色圖像檢索方法[J].計(jì)算機(jī)科學(xué),2009,36(9):274-277. YANG Hongju,ZHANG Yan,CAO Fuyuan.Color image retrieval approach based on color moments and multi-scale texture features[J].Computer Science,2009,36(9):274-277.
[5] 趙守鵬.家庭服務(wù)機(jī)器人的現(xiàn)狀及其發(fā)展趨勢(shì)[D].濟(jì)南:山東大學(xué),2007. ZHAO Shoupeng.Study of Intelligent Space Key Technology of Home Service Robot [D].Jinan:Shandong University,2007.
[6] 馮建輝,楊玉靜.基于灰度共生矩陣提取紋理特征圖像的研究[J].北京測(cè)繪,2007(3):19-22. FENG Jianhui,YANG Yujing.Study of texture images extraction based on gray level co-occurrence matrix[J].Beijing Surveying and Mapping,2007(3):19-22.
[7] 高 雋,謝 昭.圖像理解理論與方法[M].北京:科學(xué)出版社,2009. GAO Juan,XIE Zhao.Image Understanding Theory and Method[M].Beijing:Science Press,2009.
[8] 李春華,付 麗.基于DCT變換的數(shù)字圖像盲水印算法[J].河北科技大學(xué)學(xué)報(bào),2012,33(4):334-337. LI Chunhua,FU Li.Blind digital image watermarking algorithm based on DCT[J].Journal of Hebei University of Science and Technology,2012,33(4):334-337.
[9] HERMANN G.Patch programming:The integration of motion planning into numerical control[J].Computers in Industry,1984,5(4):351-359.
[10] WU Y C, LEE Y S, YANG J C.Robust and efficient multiclass SVM models for phrase pattern recognition[J].Pattern Recognition,2008,41(9):2874-2889.
[11] MELLINGER J,SCHALK G,BRAUN C,et al.An MEG-basedbrain-computer interface(BCI)[J].Neuroimage,2007,36(3):581-593.
[12] DARIO P,GUGLIELMELLI E,ALLOTTA B,et al.Robotics for medical applications[J].IEEE Robotics and Automation Magazine,1996,3(3):4456.
[13] PRIOR S D,WARNER P R.A review of world rehabilitation robotics research[J].Colloquium on High-Tech Help for the Handicapped,1990(4):1-3.
[14] GUEGUEN L, PESARESI M.Multi scale Harris corner detector based on differential morphological decomposition[J].Pattern Recognition Letters,2011,32(14):1714-1719.
[15] ZHANG C S, CAI Q,SONG Y.Boosting with pairwise constraints[J].Neurocomputing,2010,73(4/5/6):908-919.
Design and research of robot arm control system
WU Xueli1,2, LIU Haonan1,2, XU Qing1,2
(1.School of Electrical Engineering, Hebei University of Science and Technology, Shijiazhuang Hebei 050018,China;2.Engineering Technology Research Center, The Production Process Aumation of Hebei Province, Shijiazhuang Hebei 050018, China)
Based on the DMC5480 motion control card, the RS232 serial communication is achieved by using the visual processing system, and a precise positioning system that can identify the robot arm is designed. The control system hardware is studied in detail and its control strategy is planned followed by preparing the PC operating software. Finally, an arm of a chess robot with visual recognition is designed. Experimental results show that the robot arm can replace the manual function along an arbitrary trajectory in the work area.
visual recognition; robot arm; DMC5480 control card; servo control
2014-02-24;
2014-03-09;責(zé)任編輯:陳書欣
國家自然科學(xué)基金(60974018;61273188);河北省自然科學(xué)基金(F2012208075)
吳學(xué)禮(1961-),男(滿族),黑龍江齊齊哈爾人,教授,博士生導(dǎo)師,主要從事控制科學(xué)與工程方面的研究。
E-mail:kclhn604784404@163.com
1008-1542(2014)04-0361-05
10.7535/hbkd.2014yx04009
TP391.4
A
吳學(xué)禮,劉浩南,許 晴.機(jī)器人手臂控制系統(tǒng)的設(shè)計(jì)與研究[J].河北科技大學(xué)學(xué)報(bào),2014,35(4):361-365.
WU Xueli, LIU Haonan, XU Qing.Design and research of robot arm control system[J].Journal of Hebei University of Science and Technology,2014,35(4):361-365.