
頻率分析在扶梯調試中的應用
2014-09-01 09:20:53胡傲
機電信息 2014年9期
胡 傲
(廣州奧的斯電梯有限公司,廣東 廣州 510425)
頻率分析在扶梯調試中的應用
胡 傲
(廣州奧的斯電梯有限公司,廣東 廣州 510425)
由于難以確定振動來源,目前工地現場對自動扶梯振動進行調試的工作效率并不高。現嘗試使用頻率分析的方法來確定自動扶梯的振動來源,并對所確認的振動來源進行有針對性的調整,以消除或減弱其影響,結果大大提高了自動扶梯振動調試的工作效率。
頻率分析;自動扶梯;振動;調試
0 引言
隨著生活水平的提高,人們在享受自動扶梯所帶來的便利性的同時,也越來越強調乘坐的舒適性。作為自動扶梯乘坐舒適性的指標之一,梯級和扶手帶的振動也日益引起人們的關注。但是在工地現場,因為難以確定振動的來源,對振動超標的自動扶梯進行調試并不是一件容易的工作。目前工地現場對于自動扶梯振動的調試往往依賴“經驗+運氣”的模式,即根據經驗,逐一檢查和調整可能導致振動超標的各個零部件,并反復進行測量,直到振動指標滿足要求為止。這種方法效率很低,因為大量的時間被消耗在對振動源的盲目查找上。那么有沒有一種可以提高自動扶梯振動調試效率的方法呢?筆者嘗試使用頻率分析的方法來確認自動扶梯的振動源,然后有針對性地進行調整,以消除或減弱其影響。
1 使用頻率分析法對自動扶梯振動進行調試的原理
1.1 快速傅里葉變換(FFT)
使用頻率分析法對自動扶梯的噪音振動進行分析,首先要將自動扶梯的振動數據轉為頻率譜圖。這就需要使用快速傅里葉變換(FFT)的工具。FFT是1965年由J.W.庫利和T.W.圖基提出的。它是離散傅里葉變換的快速算法,可以將一個信號從時域變換到頻域[1]。因此,使用FFT可以將振動信號的頻率提取出來,并繪制成頻率譜圖。根據頻率譜圖,就有可能找出振動源。
1.2 自動扶梯零部件運動頻率的計算
自動扶梯的振動是由自動扶梯各部件的運動導致,其振動頻率與相應部件的運動頻率相一致[2]。自動扶梯各部件的運動頻率可以分為2類:旋轉頻率和多邊形效應頻率。
自動扶梯上有很多旋轉部件,如主機馬達、主驅動、扶手驅動、各種滾輪等。若由于某些原因,它們沒有繞其圓心旋轉,或其旋轉圓周上有缺陷,就會導致自動扶梯產生與其旋轉頻率相一致的振動。旋轉部件的旋轉頻率可用下式計算:
f=φ/60
式中,f為旋轉部件的旋轉頻率(Hz);φ為旋轉部件的旋轉速度(r/min)。
自動扶梯上也有很多鏈輪,如主機鏈輪以及主驅動上的驅動鏈鏈輪、梯級鏈鏈輪和扶手驅動鏈鏈輪等。自動扶梯的多邊形效應是指當這些鏈輪每轉過一個齒時,相對應鏈條的速度都從大到小再從小到大變化一次的現象。多邊形效應會導致自動扶梯的運行速度時快時慢,使乘客產生前后竄動的不適感。其頻率與鏈輪的轉速以及齒數有關,可用下式計算:
f=φ·n/60
式中,f為自動扶梯多邊形效應的頻率(Hz);φ為自動扶梯鏈輪的轉速(r/min);n為自動扶梯鏈輪的齒數。
1.3 諧波
根據法國數學家傅里葉的發現,任何周期性重復的波形都可分解為基波和一系列為基波頻率倍數的諧波的正弦波分量。自動扶梯的振動大多是周期性振動,因此除了頻率與其運動頻率相一致的基波外,還有一系列頻率為基頻整數倍的諧波。其中,頻率為基頻2倍的諧波叫2次諧波,頻率為基頻3倍的諧波叫3次諧波,依此類推。基波和諧波在頻率譜圖上表現出一系列等距分布的頻率峰。圖1就是一個典型的帶諧波的頻率譜圖。
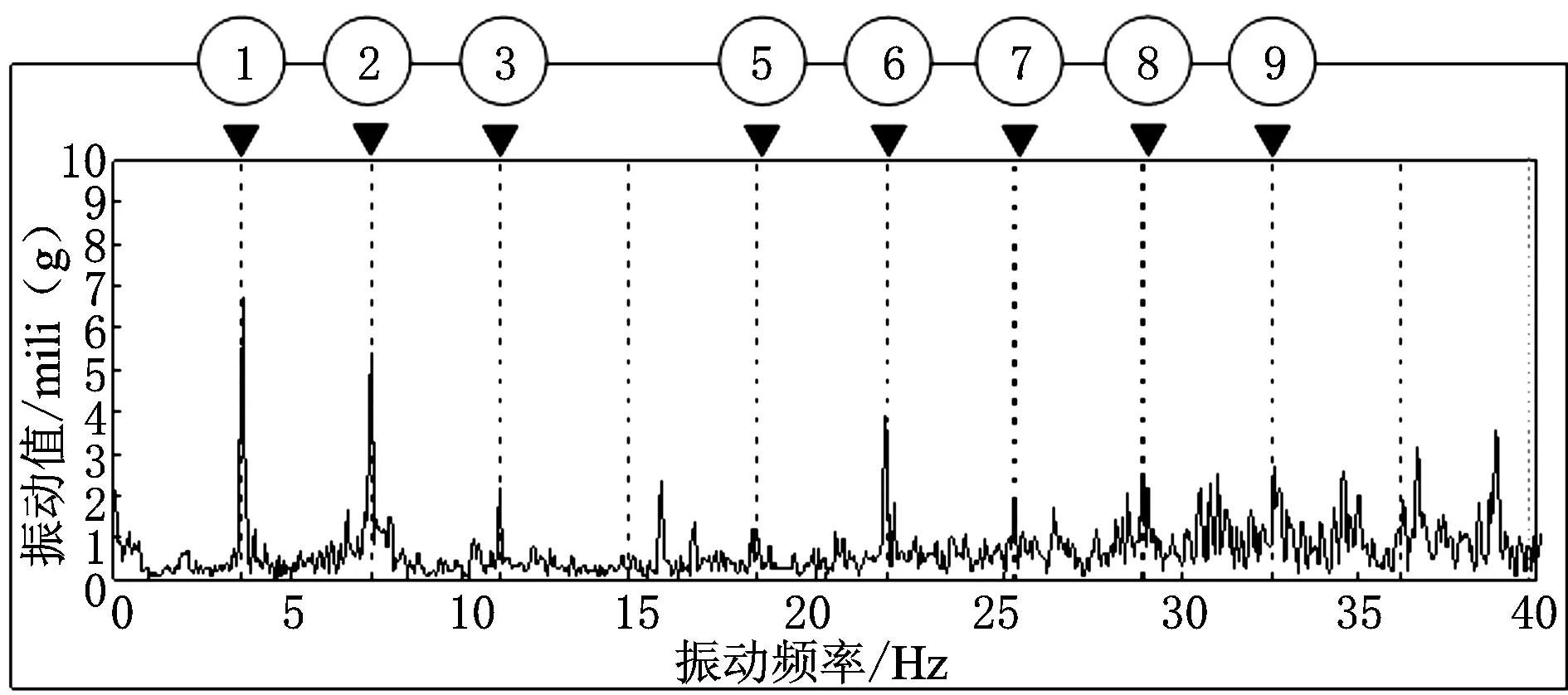
圖1 帶諧波的頻率譜圖
這是一個自動扶梯梯級振動的頻率譜圖,從中可以明顯看到一系列等距分布的頻率峰,這是由梯級鏈多邊形效應所產生的。其中,最左側的1號頻率峰的頻率與梯級鏈多邊形效應的頻率相一致,是基頻峰,其余幾個頻率峰分別是2、3、5、6、7、8、9次諧波的頻率峰。
2 使用頻率分析法對自動扶梯振動進行調試的工程實例
我們使用頻率分析法對一臺振動超標的自動扶梯進行了調試,收到了很好的效果。表1是調試之前這臺扶梯梯級和扶手帶振動測量數據,測量工具是PMT。

表1 調試之前自動扶梯振動測量值 單位:mili(g)
可見,這臺自動扶梯的梯級和右側扶手帶的振動都超出了允許值范圍,需要進行調試。于是我們使用了頻率分析的方法來進行這項工作。
2.1 各零部件所引起的扶梯振動頻率的計算
我們收集了這臺扶梯的一些參數(表2)作為各零部件運動頻率計算的輸入,這些參數可以方便地通過現場測量或查看設備銘牌得到。
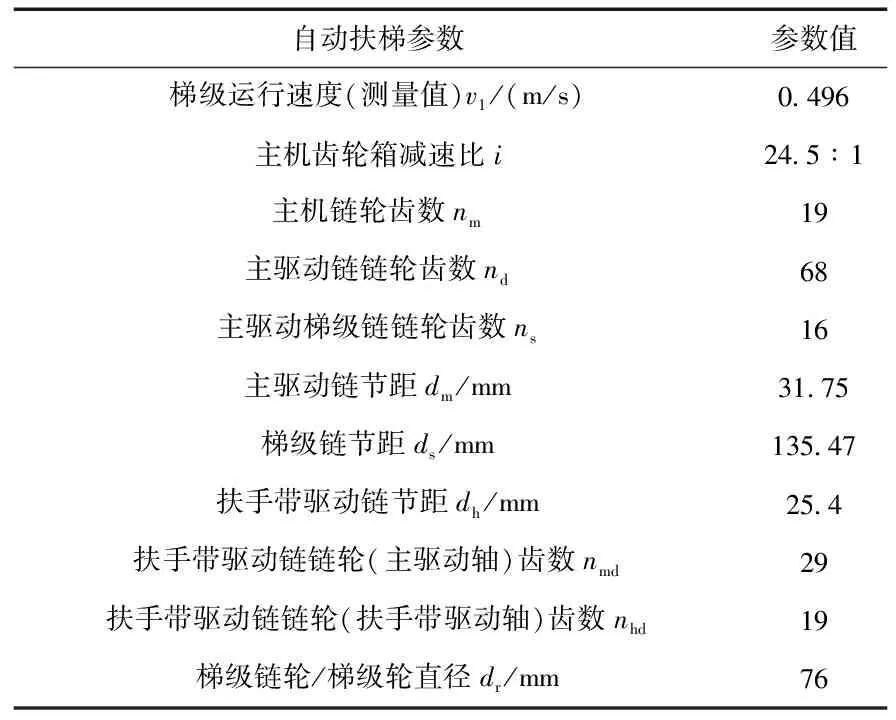
表2 待調試自動扶梯參數
根據表2所列的扶梯參數,我們計算出各零部件的運動頻率,如表3所示。
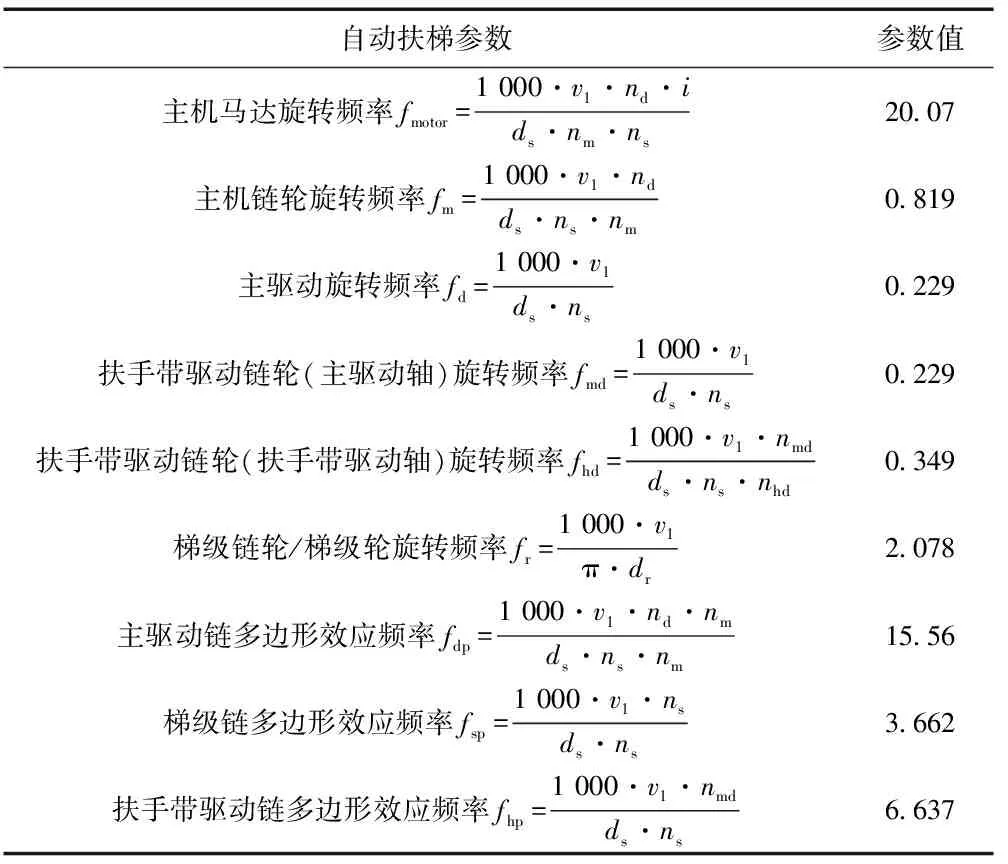
表3 自動扶梯各零部件運動頻率的計算 單位:Hz
根據表3所列這臺自動扶梯各零部件的運動頻率,我們可以算出它們所引起的扶梯振動的頻率,如表4所示。
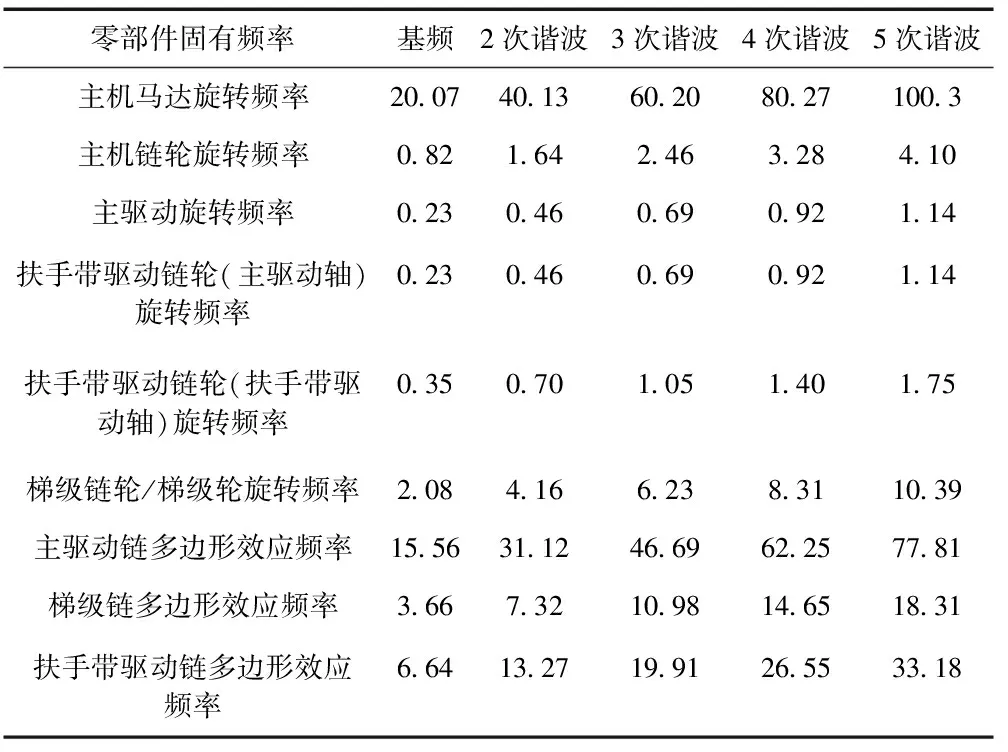
表4 由各零部件運動所引起的扶梯振動的頻率 單位:Hz
2.2 扶梯振動頻率譜圖的繪制以及主要振動源的確定
在算出了各零部件運動所引起的扶梯振動頻率后,我們使用Physical Measurement Technologies公司的EVA振動分析工具軟件(版本號:8.7511)的FFT功能,對這臺自動扶梯的梯級和右側扶手帶的振動頻率譜圖進行了繪制,并將其與該扶梯各零部件運動所引起的振動頻率相比對,發現了與主驅動鏈、梯級鏈和扶手帶驅動鏈多邊形效應相對應的頻率。這些都是扶梯運行所固有的正常頻率。除此之外,還發現了一個7.78 Hz的未知頻率。
經觀察發現,這個未知頻率剛好是主驅動鏈多邊形效應所引起的振動頻率15.56 Hz的1/2,于是我們懷疑這個未知頻率與主驅動鏈有關。進一步檢查發現,這臺扶梯的主機安裝時調整不到位,導致主驅動鏈與主機鏈輪在嚙合的時候有刮擦現象。由于主驅動鏈是內—外鏈板交替排列的結構(圖2),當主機安裝位置不正確時,主驅動鏈的內鏈板就會與主機鏈輪發生刮擦。主驅動鏈上2個相鄰內鏈板間的距離是主驅動鏈節距的2倍,而其對應的頻率正好就是主驅動鏈多邊形效應頻率的1/2。因此我們可以認為,這個未知頻率就是由于主驅動鏈與主機鏈輪的刮擦所導致的。這是扶梯不正常運行所導致的異常頻率。

圖2 主驅動鏈結構圖
由此,我們確定了這臺扶梯的4個主要振動源,分別是主驅動鏈的多邊形效應、梯級鏈的多邊形效應、扶手帶驅動鏈的多邊形效應以及主驅動鏈與主機鏈輪的刮擦,如圖3所示。
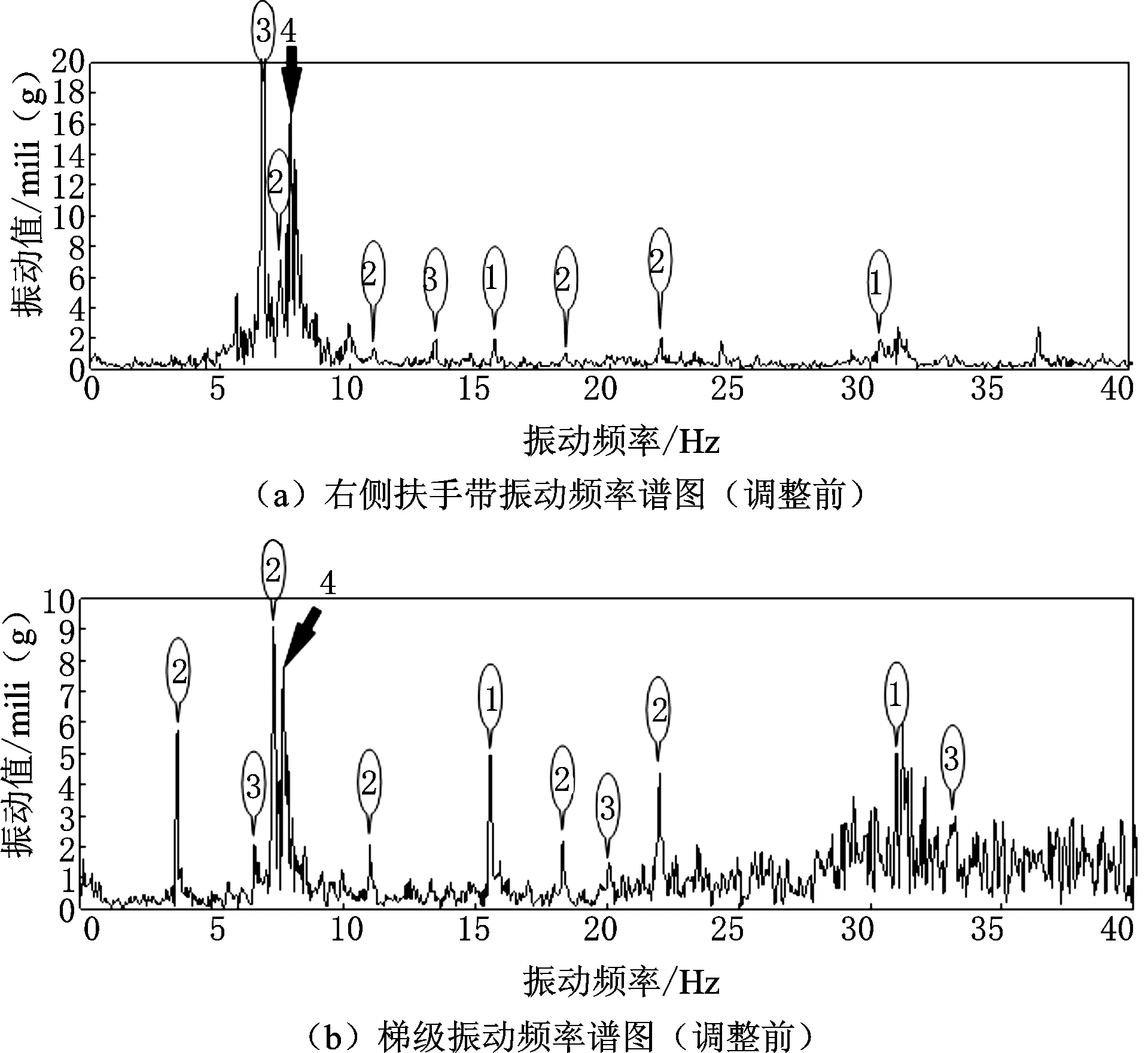
圖3 待調試扶梯右側扶手帶和梯級振動頻率譜圖
從圖3中各頻率峰的峰高可以看出,梯級的振動受主驅動鏈和梯級鏈影響比較大,扶手帶的振動受扶手帶驅動鏈影響比較大,而主驅動鏈與主機鏈輪的刮擦對二者影響都很大。
2.3 對扶梯主要振動源的調整以及效果驗證
從以上分析可見,這臺扶梯存在的問題是主驅動鏈與主機鏈輪的刮擦,這是導致其振動超標的主要原因。只有消除了這個問題,才能使扶梯的振動符合要求。
因此,我們對主機的位置進行了調整,使主驅動鏈的張緊處于合適的狀態,并且與主機鏈輪不存在刮擦。調整之后,我們重新測量了該扶梯的振動,結果如表5所示。
從表5可見,在調整了主機位置后,這臺扶梯的振動有了明顯的降低,達到了規定要求。為了進一步驗證我們的調整措施是否成功地消除了7.78 Hz的不正常振動頻率,我們繪制了調整后該扶梯右側扶手帶和梯級振動的頻率譜圖(圖4),發現這個頻率峰果然已經消失不見。
這證明我們之前對于導致這個頻率的振動源的判斷是正確的,并且調整措施是有效的。
3 結語
根據上文所述,我們可以看出,使用頻率分析法可以準確地找到自動扶梯的振動源,有針對性地對其進行調整,可以大大提高對自動扶梯的調試效率。
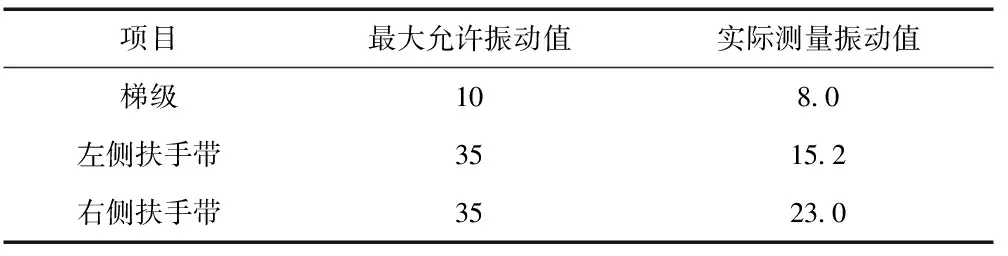
表5 調試之后自動扶梯振動測量值 單位:mili(g)
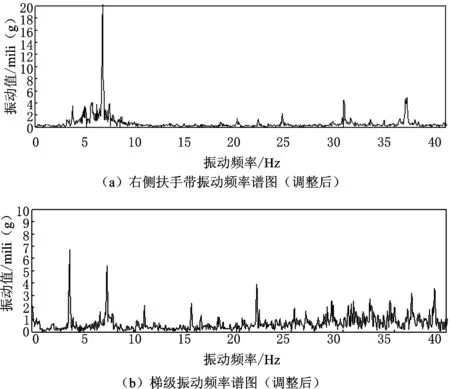
圖4 調試后扶梯右側扶手帶和梯級振動頻率譜圖
[1]胡麗瑩,肖蓬.快速傅里葉變換在頻譜分析中的應用[J].福建師范大學學報:自然科學版,2011(7):27~30
[2]洪致育,謝明軍,陳剛.舒適性——自動扶梯振動和噪聲的測試與分析[J].振動與動態測試,1984(4):1~10
2014-03-07
胡傲(1979—),男,湖南長沙人,測試工程師,研究方向:自動扶梯認證測試。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
電子制作(2018年12期)2018-08-01 00:47:44
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產業(2016年2期)2016-03-01 01:25:18
