基于veDYNA的運輸車輛側翻動力學仿真研究
2014-09-06 09:58:17孟憲皆邱緒云
山東交通學院學報 2014年3期
關鍵詞:模型
高 琦,孟憲皆*,邱緒云
(1.山東理工大學 交通與車輛工程學院,山東淄博 255049;2.山東交通學院 汽車工程學院,山東濟南 250023)
基于veDYNA的運輸車輛側翻動力學仿真研究
高 琦1,孟憲皆1*,邱緒云2*
(1.山東理工大學 交通與車輛工程學院,山東淄博 255049;2.山東交通學院 汽車工程學院,山東濟南 250023)
選取三軸貨車為研究對象,基于車輛動力學仿真軟件veDyna環境建立運輸車輛行駛動力學仿真平臺,并對模型的有效性進行驗證。通過設置角階躍典型行駛道路工況,分析車輛行駛動力學參數和道路參數等因素對運輸車輛發生側翻的影響機理。仿真結果表明,車速、方向盤轉角等動力學參數對運輸車輛的側傾穩定性影響較大,道路參數對運輸車輛的側傾穩定性影響較小。建立的運輸車輛行駛動力學仿真平臺,能夠很好的模擬真實車輛的實際工況,為進一步研究運輸車輛的防側翻控制提供較好的理論基礎。
運輸車輛;側翻;動力學;仿真
隨著我國交通運輸事業的迅猛發展,汽車年產量、保有量和交通流量不斷擴大,行車安全尤為重要,一旦發生碰撞和側翻等交通事故,對于其它車輛危害更大。在眾多側翻事故中,運輸車輛由于車輛質心位置較高、車體較長,高速時更容易發生側翻。
近年來,許多國內外學者對車輛側翻進行了研究,并取得一定成果。文獻[1]在建立車輛簡化模型的基礎上研究車輛穩態邊界問題,從而給車輛穩定行駛提供了理論基礎;文獻[2]采用橫向載荷轉移率來判定側翻的危險程度,進一步確定了側翻時間計算模型;文獻[3]在建立14自由度車輛模型的基礎上評估車輛的行駛狀態和側翻閾值,并研究了主動防側翻控制方法;文獻[4]采用底盤集成控制方法提高重型車輛側傾穩定性,并用仿真方法驗證了控制算法。國內對側翻的研究起步相對較晚,在側翻動力學建模、預測及防側翻控制等方面取得了較為突出的成果[5-13]。
運輸車輛的側翻受多種因素的影響,除了受車輛動力學參數的影響外,還受車輛本身的結構參數和道路參數的影響,且由于其總質量、車體較大的原因,用試驗方法全面研究運輸車輛的側翻動力學機理有非常大的難度和危險。為此,本文采用計算機仿真方法,基于veDYNA軟件建立運輸車輛側翻動力學仿真平臺,分析運輸車輛側翻的各種影響因素,對于研究運輸車輛側翻的預測以及防側翻控制具有十分重要的意義和價值。
1 動力學仿真平臺的建立
1.1 veDYNA軟件
veDYNA(Vehicle dynamic analysis)是一款整車動力學實時仿真軟件,在寶馬、奧迪和福特等汽車的研發中得到了廣泛應用。veDYNA以MATLAB為平臺,為使用者提供實時的完全參數化的多體動力學模型,它運行于MATLAB/Simulink環境下,將多體系統動力學與MATLAB控制計算的優勢結合在一起,從根本上解決大型多體動力學軟件(如ADAMS等)在控制系統設計中需要與MATLAB進行耦合仿真的問題,在實時仿真與控制方面具有很大的優勢[14-15]。
1.2運輸車輛veDYNA模型的建立
在veDYNA軟件中選用三軸貨車(見圖1)搭建仿真平臺,主要包括多體動力學車體模型、各種操縱控制模型、三維路面模型和虛擬駕駛員模型等。其中,車體模型包括三軸貨車的各部分結構尺寸、載荷、轉動慣量以及懸架阻尼、剛度等參數,如圖2所示。定義的各種操縱控制模型包括縱向控制、橫向控制和制動控制等。
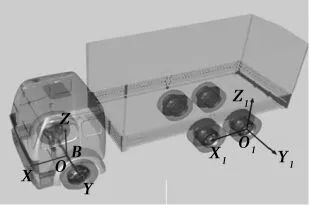
圖1 三軸貨車模型
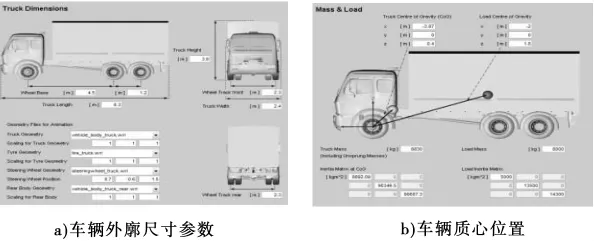
圖2 運輸車輛結構參數設置
三軸貨車整車質量為8 830 kg,整車質量繞質心縱向軸線、繞質心橫向軸線、繞質心垂向軸線的轉動慣量分別為8 892.09,90 346.50,90 607.30 kg·m2;三軸貨車的簧載質量為8 000 kg,簧載質量繞質心縱向軸線、繞質心橫向軸線、繞質心垂向軸線的轉動慣量分別為5 000,13 500,14 300 kg·m2。三軸貨車結構尺寸參數分別為:整車長6.3 m、整車寬2.4 m、整車高3.6 m、前軸至中軸4.5 m、中軸距后軸1.2 m、前軸及中后軸輪距2.3 m、整車質心高0.686 m、簧載質心高2.086 m。
仿真平臺搭建后,進行多次仿真驗證模型的有效性。
車輛發生側翻的效果如圖3所示。為進一步驗證模型的有效性,通過設置單一彎道和多彎道工況等不同的道路條件,將車輛模型實際行駛的軌跡曲線同理論期望的行駛軌跡曲線進行對比,如圖4所示。結果表明,所建立的運輸車輛行駛動力學仿真平臺能夠模擬車輛的行駛動力學過程。

圖3 運輸車輛發生側翻效果圖
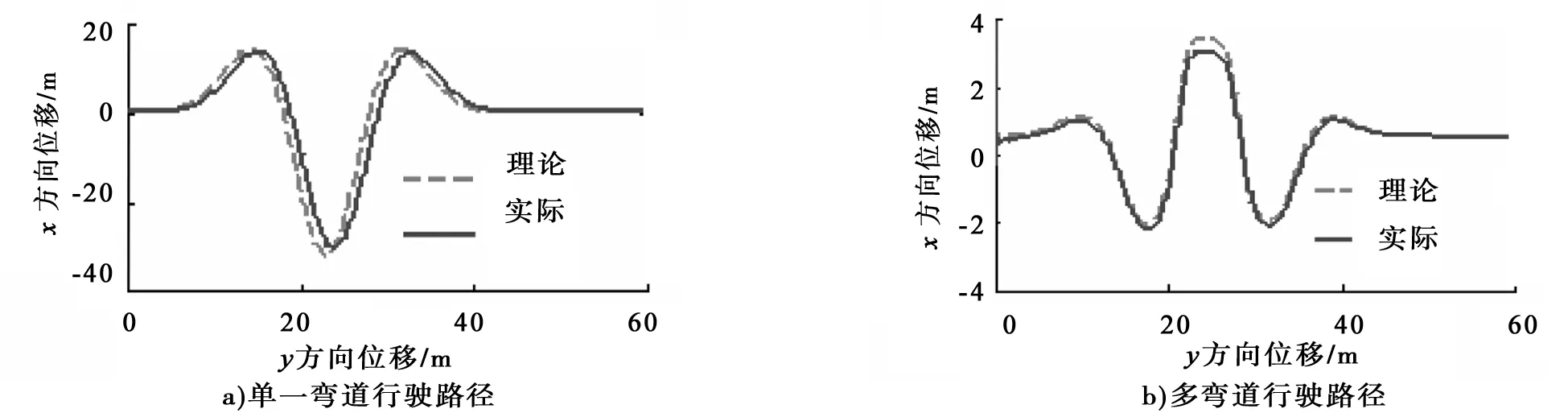
圖4 模型驗證
2 動力學仿真及分析
仿真時,通過縱向控制環節和制動環節對車速進行控制,以保證車輛勻速通過設定路徑;通過側向控制環節對方向盤轉角進行控制,實現車輛的轉向控制;上述控制環節最終通過駕駛員模型實現對運輸車輛的操縱控制。駕駛員模型對車輛的操控是自動的,能實時根據車輛速度及道路條件改變對車輛的操縱輸入。
本文采用車輛的橫向載荷轉移率KLTR和側向加速度ac作為運輸車輛發生側翻的評價指標。KLTR是更加具有通用型的側傾穩定性評價指標,KLTR的計算式[6]為

(1)
式中FLi為車輛左側各車輪的垂向力;FRi為車輛右側各車輪的垂向力;n為車軸的數量;i為車輛的第i根軸,i∈n。
車輛發生側傾時,兩側車輪受到的垂直載荷發生變化,一側增加,另一側減少。由式(1)可以看出,KLTR能夠反映車輛的側傾程度。其取值范圍為[0,1],當KLTR=0時,車輛沒有發生側傾;當|KLTR|=1時,車輪一側所受的的垂直載荷為0,車輪即將離地,車輛發生側翻。
車輛側翻閾值的計算,以往常采用靜態分析的方法,往往大于實際車輛動態行駛時的閾值。在運輸車輛實際行駛過程中,KLTR的閾值小于理論值1,側向加速度應<0.4g(g=9.8 m/s2)。
影響運輸車輛側翻的主要因素包括車輛結構參數(輪距、軸距、質心高度等)、動力學參數(車速、ac等)及道路參數(附著系數、轉彎半徑等),本文選取一部分典型影響因素進行仿真分析。
2.1不同方向盤轉角輸入時的仿真分析
設置路面附著系數為0.9,車速為80 km/h,并分別給車輛40°、60°、80°和90°的方向盤轉角階躍輸入,仿真結果見圖5、6。
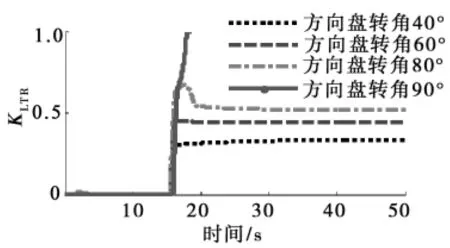
圖5 不同方向盤轉角時的KLTR

圖6 不同方向盤轉角時的ac
由圖5可以看出,當車速一定時,KLTR隨方向盤轉角的增大而增大。方向盤轉角階躍輸入40°時,KLTR較快的穩定在0.3左右,車輛發生較小的側傾;方向盤轉角階躍輸入60°時,KLTR很快穩定在0.4左右,車輛有一定的側傾;方向盤轉角增大到80°,KLTR在方向盤角階躍輸入幾秒后超過0.6,經過駕駛員模型的調節,KLTR減小并穩定在0.5左右,但車輛側傾程度較大;當方向盤轉角階躍輸入增大到90°,KLTR瞬間增大到1,車輛一側車輪離地,車輛發生側翻。
圖6表明,在車速相同的情況下,ac隨著方向盤轉角的增大,有逐漸增大的趨勢。當方向盤轉角為40°和60°階躍輸入時,ac較快的達到穩態值;方向盤轉角階躍輸入80°后一段時間,ac增大到4 m/s2,通過駕駛員模型的調節,ac有所減小,最后穩定在3.5 m/s2左右;繼續增大方向盤轉角的階躍輸入到90°,ac迅速增大到5.5 m/s2左右,車輛發生側翻,仿真停止。
2.2不同車速時的仿真分析
設置路面附著系數為0.9,車輛方向盤轉角為80°階躍輸入,通過加速使車速分別達到40,60,80 km/h并保持恒定,不同車速時KLTR、ac隨時間的變化曲線如圖7、8所示。
由圖7~8可知,在方向盤轉角固定不變的情況下,KLTR、ac均隨著車速的增加而增大。車速為60 km/h時,KLTR穩定在0.45、ac穩定在2.7 m/s2左右,車輛發生了輕微程度的側傾;車速為70 km/h時,KLTR穩定在0.5、ac穩定在3 m/s2左右,車輛發生了較為嚴重的側傾;車速增大到80 km/h時,在方向盤階躍輸入幾秒后ac先增大到0.68,KLTR先增大到3.8 m/s2左右,經過駕駛員模型調節有所減小,KLTR穩定在0.55,ac穩定在3.4 m/s2,車輛有發生側翻的趨勢。當車速超過90 km/h時,車輛發生側翻。
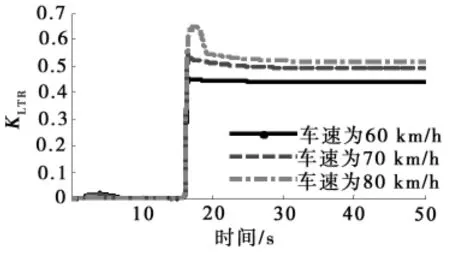
圖7 不同車速的KLTR
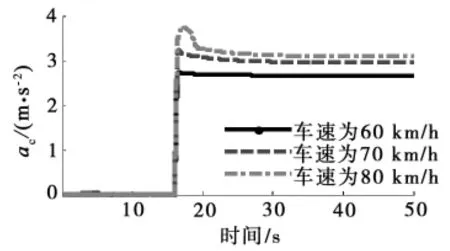
圖8 不同車速的ac
2.3不同路面附著系數時的仿真分析
為分析道路參數對運輸車輛側翻的影響,分別設置路面峰值附著系數為0.9、0.7和0.5,令車輛以70 km/h的恒定車速、方向盤轉角60°階躍輸入駛入測試區域。不同附著系數時的KLTR和ac隨時間的變化曲線如圖9、10所示。
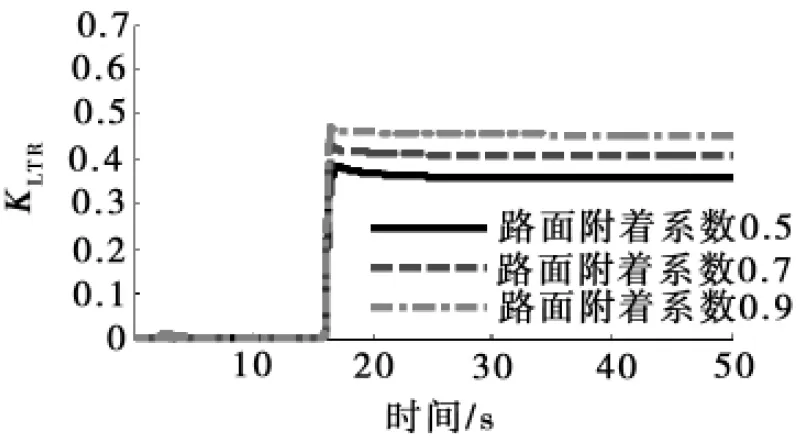
圖9 不同路面附著系數的KLTR
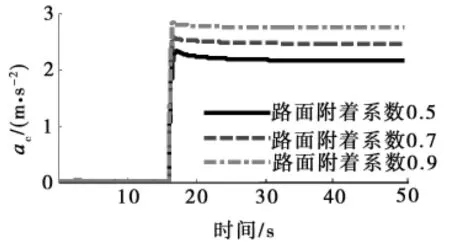
圖10 不同路面附著系數的ac
由圖9、10可以看出,在車速相同和方向盤角階躍輸入相同的情況下,運輸車輛的側傾程度隨路面附著系數的減小有所減小,但變化較小,此時車輛發生了嚴重側滑,尤其在附著系數為0.5時,車輛甚至發生甩尾現象。
3 結論
基于車輛動力學仿真軟件veDYNA建立了運輸車輛側翻動力學仿真平臺,通過設置角階躍典型工況,分析了運輸車輛行駛動力學參數和道路參數等因素對運輸車輛發生側翻的影響機理。
1)基于車輛動力學仿真軟件veDYNA建立的運輸車輛側翻動力學仿真平臺,能夠很好的模擬真實車輛的實際工況,分析主要因素對運輸車輛側傾穩定性及側翻的影響程度,對后續更加深層研究車輛側翻具有重要意義。
2)車速、方向盤轉角等動力學參數對運輸車輛的側傾穩定性影響較大。道路參數也會影響運輸車輛的側傾穩定性,但影響程度較小。
[1]Ralf Eger,Kiencke.Modeling of Rollover Sequences[J].Control Engineering Practice,2003,11(2):209-216.
[2]Paul P R.Rollover Prediction and Warning Method:USA,CA2630152[P].2008-11-02.
[3]Hyun,Dongyoon.Predictive Modeling and Active Control of Rollover in Heavy Vehicle[J].Control Engineering Practice, 2008(3):126-143.
[4]Youssef A Ghoneim, William C lin, David M Sidlosky,et al.Integrated Chassis Control System to Enhance Vehicle Stability[J].International Journal of Vehicle Design,2000,23(1-2):124-144.
[5]朱天軍,鄭紅艷.重型半掛車的ADAMS建模及穩定性分析[J].河北工程大學學報,2007,24(2):62-64.
[6]朱天軍,宗長富,吳炳勝.基于改進TTR算法的重型車輛側翻預警系統[J].機械工程學報,2011,47(10):88-94.
[7]麥莉,謝普,宗長富.重型半掛車ADAMS建模及極限工況仿真[J].汽車技術,2009(2):22-25.
[8]王睿,李顯生,任圓圓.基于橫向載荷轉移量的客車側傾穩定性分析[J].湖南大學學報:自然科學版,2013,40(5):49-54.
[9]金智林,張鴻生,馬翠貞.基于動態穩定性的汽車側翻預警[J].機械工程學報,2012,48(14):128-133.
[10]崔勝民,任熙華.基于ADAMS的重型半掛牽引車建模及性能研究[J].機械設計與制造,2011,6(6):221-223.
[11]王坤,范例,司利增.車輛操縱穩定性能評價仿真系統設計[J].山東交通學院學報,2011,19(4):12-16.
[12]仇建華,張永輝,王鑫.基于ADAMS和MATLAB的汽車ESP系統的聯合仿真[J].山東交通學院學報,2010,18(3):12-15.
[13]李仕鋒,黃雪嬌,曹源文.基于ADAMS/Car的客車平順性仿真研究[J].山東交通學院學報,2011,19(4):8-11.
[14]邢宏濱,施國標,張昕.Vedyna及其在汽車平順性分析中的應用[J].上海汽車,2006(2):6-39.
[15]鄧濤,孫冬野,秦大同.基于Simulink與veDYNA聯合仿真平臺的AMT硬件在環試驗研究術[J].汽車工程,2011,33(5):412-421.
RolloverDynamicsSimulationStudyofTransportVehicleBasedonveDYNASoftware
GAOQi1,MENGXian-jie1,QIUXu-yun2
(1.SchoolofTransportationandVehicleEngineering,ShandongUniversityofTechnology,Zibo255049,China;2.SchoolofAutomobileEngineering,ShandongJiaotongUniversity,Jinan250023,China)
In this paper, selecting a three-axis truck as the research object, a driving dynamics simulation platform of transport vehicle is established to confirm the effectiveness of the model based on the environment of vehicle dynamics simulation veDYNA software. By setting the typical operating conditions, the influence mechanism of transport vehicle is analyzed when the rollover occurs, including driving dynamics parameters of the vehicle, road parameters and so on. The established driving dynamics simulation platform of transport vehicle can verify the degree of influence of various factors on the vehicle roll stability and rollover, which provides a better theoretical foundation for further study of the transport vehicle anti-rollover control.
transport vehicle; rollover; dynamics; simulation
楊秀紅)
2014-07-27
交通運輸部基礎研究項目(2013319817190);山東省自然科學基金項目(ZR2010EL024)
高 琦(1990—),女, 山東青島人,山東理工大學碩士研究生,主要研究方向為車輛系統動力學控制與仿真;*孟憲皆(1965—),男,山東聊城人,山東理工大學副教授,工學博士,碩士研究生導師,主要研究方向為車輛動力學和NVH控制技術;*邱緒云(1977—),男,山東臨沂人,山東交通學院教授,工學博士,主要研究方向為車輛系統動力學及仿真.
10.3969/j.issn.1672-0032.2014.03.001
U467.1;U461.1
A
1672-0032(2014)03-0001-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19