主汽溫控制系統的MCP-PID控制
2014-09-10 03:51:26王燕楊平
石油化工自動化 2014年5期
王燕,楊平
(上海電力學院 自動化工程學院,上海 200090)
火電廠鍋爐過熱汽溫(主蒸汽溫度)對火電廠安全經濟運行有著重要影響。傳統的火電廠主蒸汽溫度控制系統大多采用常規的PID串級控制策略。但是,主蒸汽溫度對象由于過熱器管道長度和蒸汽容積較大,具有大遲延和大慣性。由于模型參數的不確定性以及環境變化、元件老化等問題,主蒸汽溫度對象還具有非線性和時變性的特點,因而采用常規的控制一般很難取得滿意的控制品質。為此,人們對于主蒸汽溫度控制策略已經進行了很多研究,如文獻[1]中的前饋串級控制;文獻[2]中的改進的γ_SGPC算法控制;文獻[3]中的Smith預估補償控制等[4-5];文獻[6]提出了一種新的標準傳遞函數,多容慣性MCP(Multiple Capacity Process)標準傳遞函數;文獻[7]證實了MCP標準傳遞函數具有無超調、不限系統階數和不限系統型次的優良特性;文獻[8]提出了基于MCP標準傳遞函數的PID控制器——MCP-PID控制器,該新型控制器具有超調量小和魯棒性高的優點。筆者將此新PID控制器應用于主汽溫串級控制方案的應用研究。
1 MCP-PID控制器和常規PID控制器
(1)
式中:GP(s)——被控過程傳遞函數;K——過程增益;T——過程時間常數,s;τ——過程遲延時間常數,s。
(2)
式中:GC(s)——控制器傳遞函數;KP——比例增益系數;TI——積分時間常數,s;TD——微分時間常數,s。
(3)
(4)
(5)
2 MCP-PID主汽溫控制器設計
串級主汽溫控制系統的結構如圖1所示。圖1中,G01(s)為滯后區傳遞函數;G02(s)為導前區傳遞函數;GC1(s)為主回路控制器;GC2(s)為副回路控制器;G01(s)和G02(s)與處于內回路的GC2(s)控制器組成廣義被控對象。
以下針對文獻[3]給出的某火電廠過熱汽溫被控過程案例展開研究。該過熱汽溫對象的導前區傳遞函數如式(6)所示,滯后區傳遞函數如式(7)所示。

圖1 串級主汽溫控制系統結構示意
(6)
式中:K2——導前區增益;T2——導前區時間常數,s;n2——導前區模型階數。
(7)
式中:K1——滯后區增益;T1——滯后區時間常數,s;n1——滯后區模型階數。
在該案例中,內回路采用PI 控制器,其控制器傳遞函數GC2(s)如式(8)所示。其中,比例帶δ=0.069 4,積分時間TI=6.67 s。
(8)
該案例的廣義被控對象模型為多容慣性模型式,由于PID控制器參數整定的需要,要求把多容慣性模型擬合成單容時滯模型。根據文獻[10]給出的實驗建模兩點法,可把廣義受控對象擬合為如式(9)所示模型。其中,K=2.45,T=30.5 s,τ=35.8 s。
(9)
圖2給出了廣義受控對象的實際模型和擬合模型的階躍響應曲線。可見,所擬合的單容時滯模型與實際的多容慣性模型基本吻合。
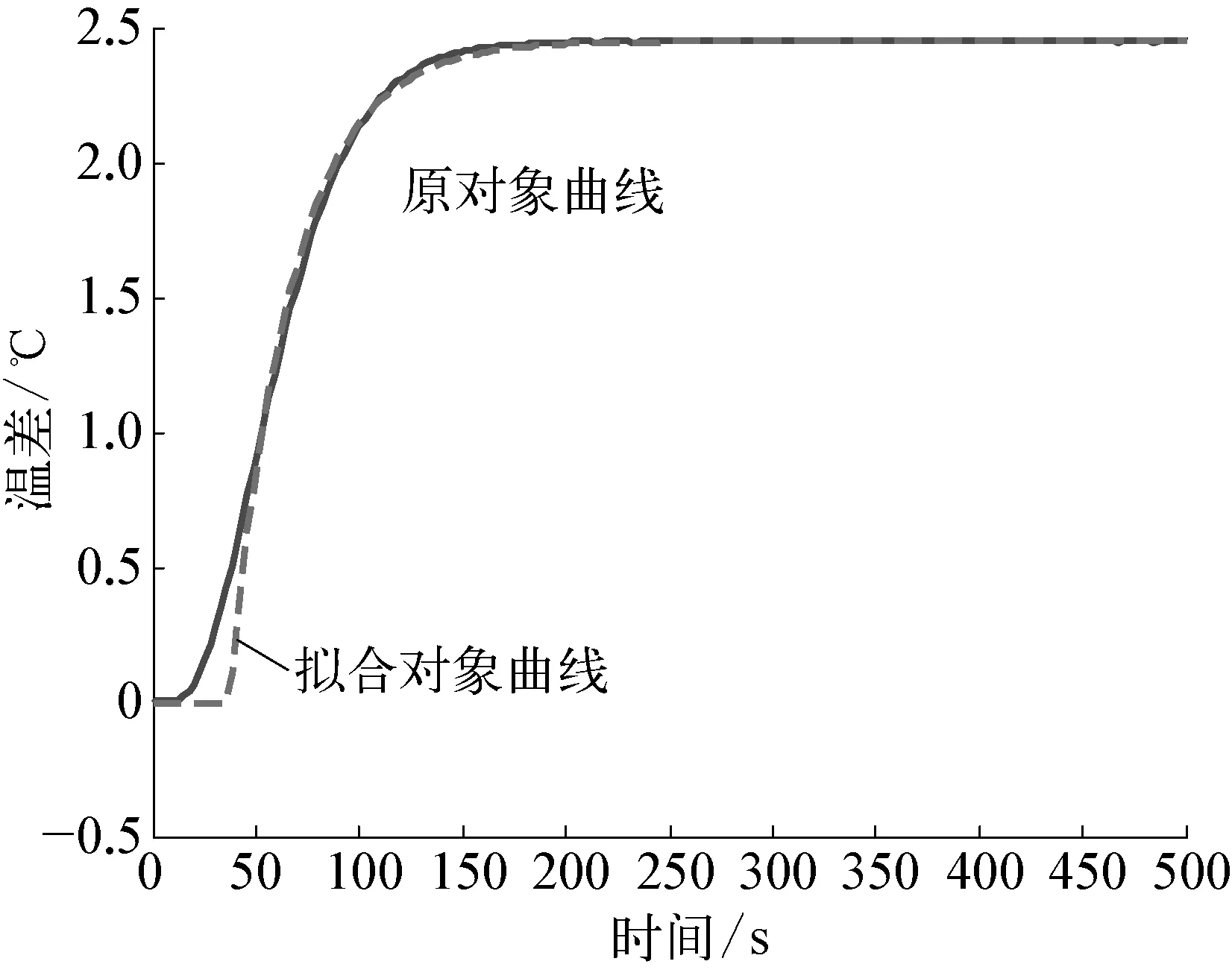
圖2 廣義對象的擬合結果示意
針對式(9)所示的廣義受控對象,可設計MCP-PID主汽溫控制器GC1(s)參數如式(10)所示。為參照對比,常規PID主汽溫串級控制系統設計為副調節器采用PI控制,控制器GC2(s)如式(8)所示;主調節器采用PID控制,主控制器GC1(s)的參數如式(11)所示。
(10)
(11)
3 仿真試驗研究
3.1 設計條件下的控制系統性能測試
對被控系統進行給定值擾動和過程擾動下的仿真測試,其中給定值擾動為單位階躍擾動,過程擾動為在400 s時,加入20%階躍擾動,響應曲線如圖3所示。
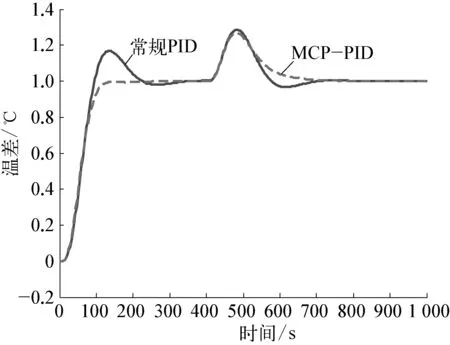
圖3 加擾動后的系統響應曲線示意
從圖3可以看出MCP-PID控制系統的調整時間較短,沒有超調量,過程擾動抑制效果好,從而可得出MCP-PID控制的控制品質明顯優于常規PID控制。
3.2 控制系統魯棒性能測試
一般來說,在控制器設計參數不變的前提下,當被控對象的參數值變化到一定程度時,控制系統的性能將惡化到不可接受的狀態。不妨設超調量σ=30%為約束對象參數變化的上限,設調整時間ts=400 s為約束對象參數變化的下限。可通過多次的對象參數變化仿真試驗來計算對象參數的允許變化范圍。
MCP-PID控制試驗時,進行滯后區增益K1參數增減搜索試驗時,按照K1=K1±ΔK(ΔK=0.2)的增減規律改變K1值,當K1=6.05時,輸出的響應曲線超調量為σ=30%,當K1=1.65時調整時間ts=400 s;進行滯后區時間常數T1增減搜索試驗時,按照T1=T1±ΔT(ΔT=0.2)的增減規律改變T1值,當T1=27.2時超調量為σ=30%,當T1=10.8時調整時間ts=400 s。
將K1=6.05,置于常規PID控制系統中進行試驗,將輸出的響應曲線與MCP-PID控制器對應的響應曲線相比較,比較結果如圖4a)所示,K1=1.65時不同控制器下的動態響應曲線如圖4b)所示。由圖4a)可知,常規PID控制與MCP-PID控制相比較,超調量大,過渡時間長,控制效果明顯不如MCP-PID控制;由圖4b)可知,此時常規PID的調整時間小于400 s,控制效果略優于MCP-PID控制器。T1=27.2時不同控制器下的動態響應曲線,如圖5a)所示,T1=10.8時不同控制器下的動態響應曲線,如圖5b)所示。由圖5a)可知,常規PID控制與MCP-PID控制相比較,超調量大,過渡時間長,控制效果明顯不如MCP-PID控制;由圖5b)可知,此時常規PID的調整時間小于400 s,控制效果略優于MCP-PID控制器。
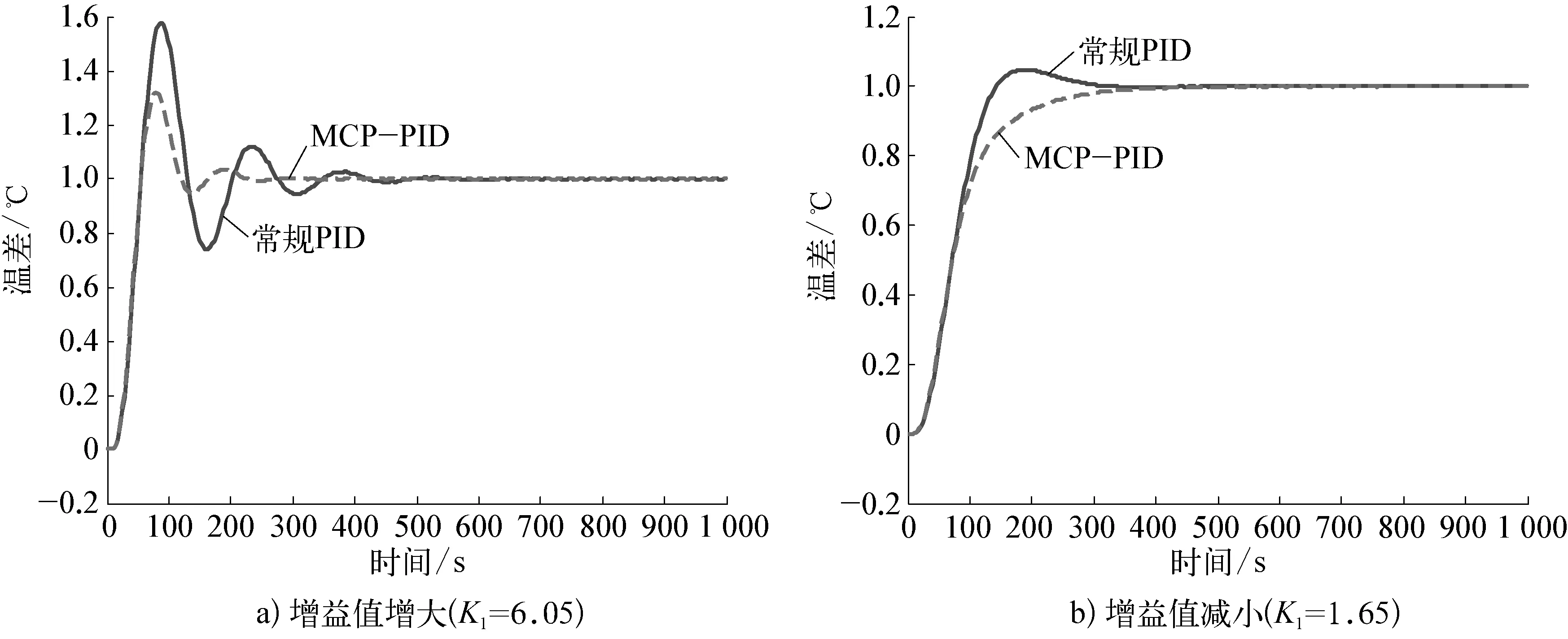
圖4 改變增益后兩種控制器的控制效果示意
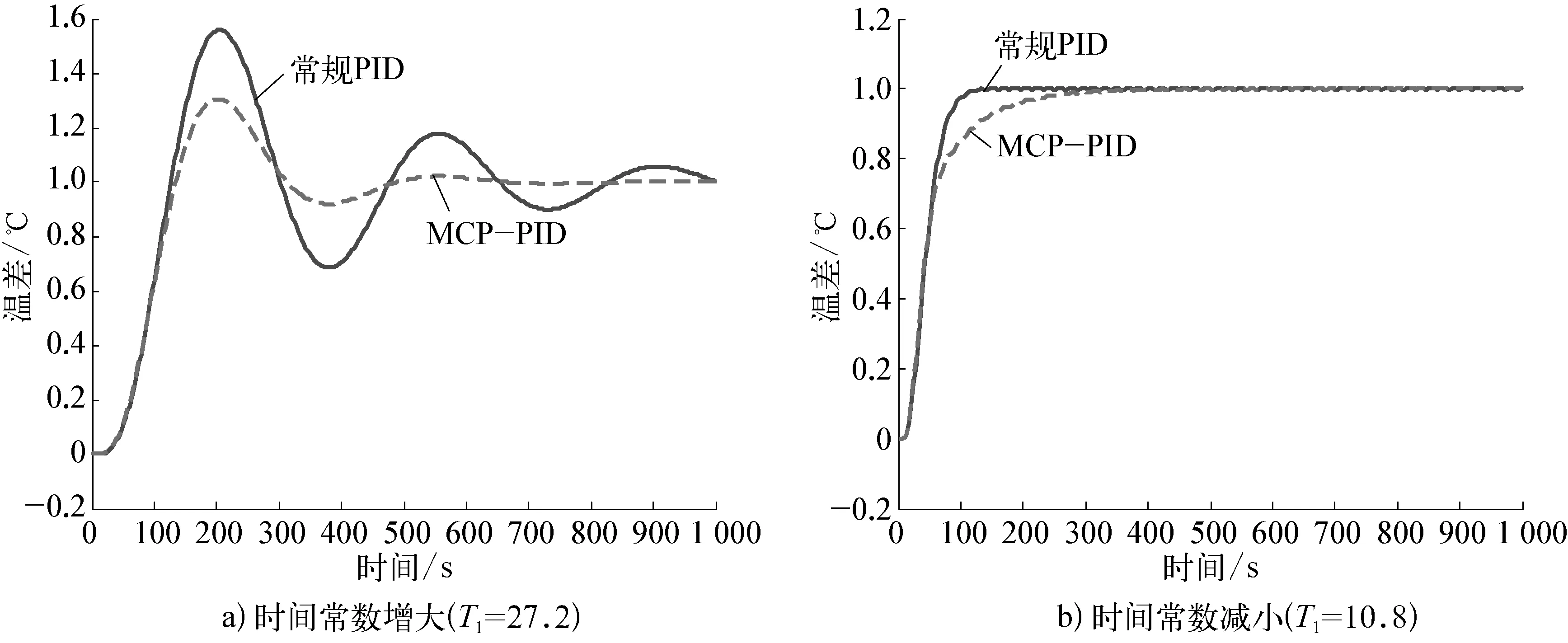
圖5 改變時間常數后兩種控制器的控制效果示意
同理進行常規PID控制試驗時,當K1=3.45時,輸出的響應曲線超調量為σ=30%,當K1=1.05時調整時間ts=400 s,當T1=19.6時超調量為σ=30%,當T1=7.8時調整時間ts=400 s。
整理以上試驗數據見表1所列。
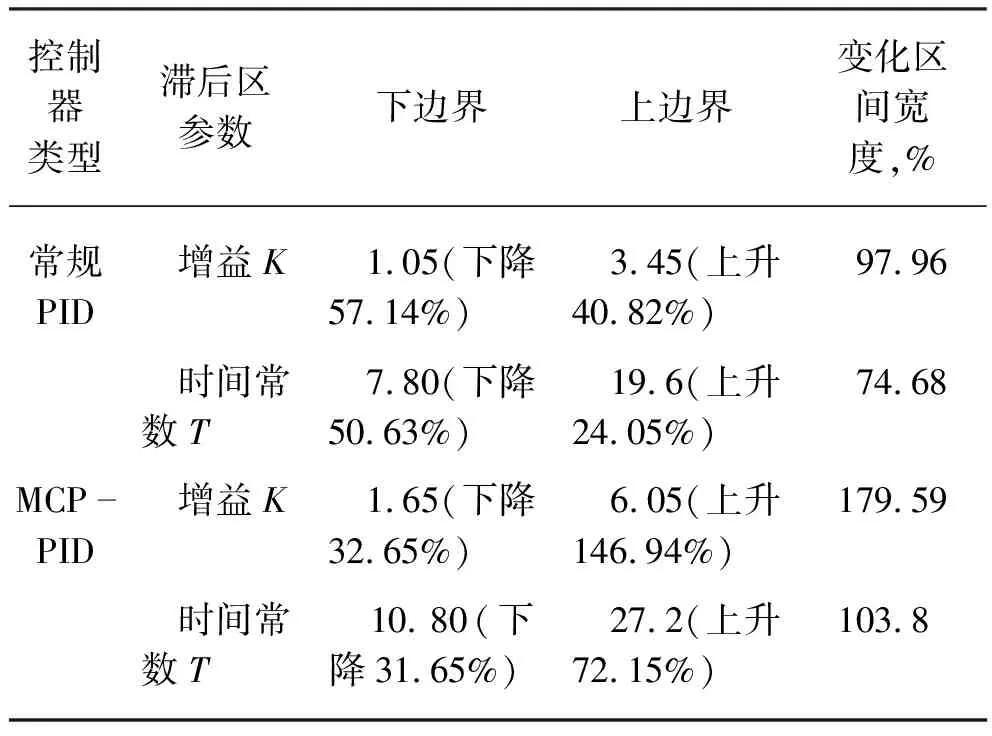
表1 控制性能約束下的被控對象的參數變化允許范圍
分析表1中數據可知,MCP-PID可以允許的滯后區增益K1變化區間寬度為179.59%,時間常數T1變化區間寬度為103.8%;常規PID只能允許滯后區增益K1變化區間寬度為97.96%,時間常數T1變化區間寬度為74.68%。可見,MCP-PID主汽溫控制系統具有更強的魯棒性。另一方面,兩者允許過程參數變化的邊界值不一樣。就下邊界而言,常規PID的比MCP-PID的要低;而就上邊界而言則是MCP-PID的比常規PID的要高得多。
4 結 論
MCP-PID控制器設計計算和常規PID一樣簡單,但是控制品質有較大的提升。MCP-PID控制用于電廠主蒸汽溫度控制的案例研究表明: 當過程參數在設計條件下時,MCP-PID控制無超調、調整時間短且過程擾動抑制效果好;當過程參數在非設計條件下時,MCP-PID可以允許的過程參數變化區間寬度遠比常規PID的允許變化區間寬度要寬得多;可見MCP-PID控制具有更強的魯棒性。因此,MCP-PID控制器更值得推薦用于電廠主蒸汽溫度控制以及其他類似的領域過程控制。
參考文獻:
[1]王振,張紅軍,劉長遠,等.基于負荷前饋補償的主汽溫串級廣義預測控制[J].石油化工自動化,2012,48(06): 36-39.
[2]樊培利,徐毅,王振,等.改進的γ_SGPC算法在主汽溫控制過程中的仿真研究[J].石油化工自動化,2011,47(06): 40-44.
[3]彭道剛,楊平,王志萍.基于神經網絡PID參數自學習的過熱汽溫Smith預估補償控制[J].發電設備,2004(增刊1): 95-98.
[4]劉紅軍,韓璞,王東風.基于DMC-PID串級主汽溫控制系統的仿真研究[J].自動化技術與應用,2002,21(06): 11-13.
[5]王國玉,韓璞,王東風,等.PFC-PID串級控制在主汽溫控制系統中的應用研究[J].中國電機工程學報,2002,12(12): 50-55.
[6]楊平,余潔,孫宇貞.多容慣性標準傳遞函數的建立與比較[J].上海電力學院學報,2011,27(05): 512-514.
[7]楊平,陳式躍.無超調不限階數的M型次多容慣性標準傳遞函數[J],中國測試,2013,39(02): 14-18.
[8]楊平,黃偉,孫宇貞,等.PID參數整定的MCP標準傳遞函數法公式.上海電力學院學報,2014,30(1): 40-45,70.
[9]楊平,翁思義,郭平.自動控制原理—理論篇[M].北京: 中國電力出版社,2009: 147-155.
[10]王再英,劉淮霞,陳毅靜.過程控制系統與儀表[M].北京: 機械工業出版社,2006: 140-145.
[11]湯志武.內模PID控制在加熱爐出口溫度控制中的應用[J].化工自動化儀表,2013,40(07): 842-844.
[12]王順杰,王潤田.在線自適應模糊PID控制器的設計與仿真[J].化工自動化及儀表,2012,39(08): 975-978,981.
猜你喜歡
北京航空航天大學學報(2021年6期)2021-07-20 07:23:56
電子制作(2019年19期)2019-11-23 08:41:36
重型機械(2019年3期)2019-08-27 00:58:52
測控技術(2018年7期)2018-12-09 08:58:46
電子制作(2018年19期)2018-11-14 02:37:02
光學精密工程(2016年4期)2016-11-07 09:05:39
物探化探計算技術(2014年1期)2014-06-27 01:32:50
電測與儀表(2014年11期)2014-04-04 09:21:20
電子設計工程(2014年18期)2014-02-27 12:00:19
電氣電子教學學報(2013年1期)2013-07-05 09:41:14
