老年人三維本體感覺測(cè)試系統(tǒng)研制與應(yīng)用
2014-09-13 03:50:28紀(jì)仲秋
中國(guó)老年學(xué)雜志 2014年21期
李 林 紀(jì)仲秋 龔 瑞
(北京師范大學(xué)體育與運(yùn)動(dòng)學(xué)院,北京 100875)
在老年人康復(fù)治療中,臨床醫(yī)生往往將注意力集中在肌力下降、關(guān)節(jié)活動(dòng)受限、肢體痙攣等,主要予以關(guān)節(jié)運(yùn)動(dòng)和肌力訓(xùn)練,而同樣重要的本體感覺障礙卻常被忽略。本體感覺康復(fù)訓(xùn)練裝置較多,測(cè)評(píng)裝置很少,如BIODEX多關(guān)節(jié)肌力測(cè)試系統(tǒng)可以測(cè)試大關(guān)節(jié)的單軸本體感覺。但該設(shè)備價(jià)格昂貴,且不易移動(dòng),不能方便攜帶到病房或康復(fù)大廳。而且不能對(duì)頸椎、腰椎和小關(guān)節(jié),如手指關(guān)節(jié)進(jìn)行測(cè)試,最主要是等速設(shè)備進(jìn)行的是某一關(guān)節(jié)的單軸本體感覺測(cè)試,而在現(xiàn)實(shí)生活和運(yùn)動(dòng)中,人體一般進(jìn)行的是三維空間里的三軸復(fù)合運(yùn)動(dòng)〔1,2〕。本文擬研制老年人三維本體感覺測(cè)試系統(tǒng)。
1 測(cè)試原理與方法、系統(tǒng)組成
1.1原理與方法 老年人三維本體感覺測(cè)試系統(tǒng)采用主動(dòng)-主動(dòng)開鏈角度重建法。角度重建法主要是對(duì)關(guān)節(jié)位置覺的測(cè)定,可分為開鏈和閉鏈位置重建兩種。前者又分為被動(dòng)-被動(dòng)、被動(dòng)-主動(dòng)、主動(dòng)-主動(dòng)開鏈角度重建。主動(dòng)-主動(dòng)開鏈位置重建法主要是預(yù)先令受試者的關(guān)節(jié)主動(dòng)定于某一屈曲角度,作為目標(biāo)角度,停留幾秒,讓受試者注意感受關(guān)節(jié)的位置,然后再令受試者通過(guò)主動(dòng)運(yùn)動(dòng)并依靠自我判斷重建上述角度,最后對(duì)角度重建的精確度進(jìn)行測(cè)量。老年人三維本體感覺測(cè)試系統(tǒng)包括一個(gè)自制的基于慣性傳感器的姿態(tài)測(cè)量系統(tǒng),該系統(tǒng)可以輸出較高精度的姿態(tài)角等數(shù)據(jù)。將受試者測(cè)試關(guān)節(jié)的近端環(huán)節(jié)固定,慣性傳感器通過(guò)綁帶固定在測(cè)試關(guān)節(jié)的遠(yuǎn)端環(huán)節(jié)上。慣性傳感器在受試者測(cè)試關(guān)節(jié)的遠(yuǎn)端環(huán)節(jié)運(yùn)動(dòng)過(guò)程中與其做相同的運(yùn)動(dòng),并記錄下實(shí)時(shí)變化的三維角度值,即關(guān)節(jié)活動(dòng)角度值。此方法可方便記錄角度重建法中三維的目標(biāo)角度、重建角度等數(shù)據(jù)。三維姿態(tài)輸出被定義為慣性傳感器自身坐標(biāo)系S,與地球固定坐標(biāo)系G之間的定位,使用與地球固定坐標(biāo)系G作為參考坐標(biāo)系,遵循笛卡兒右手定則,如圖1。
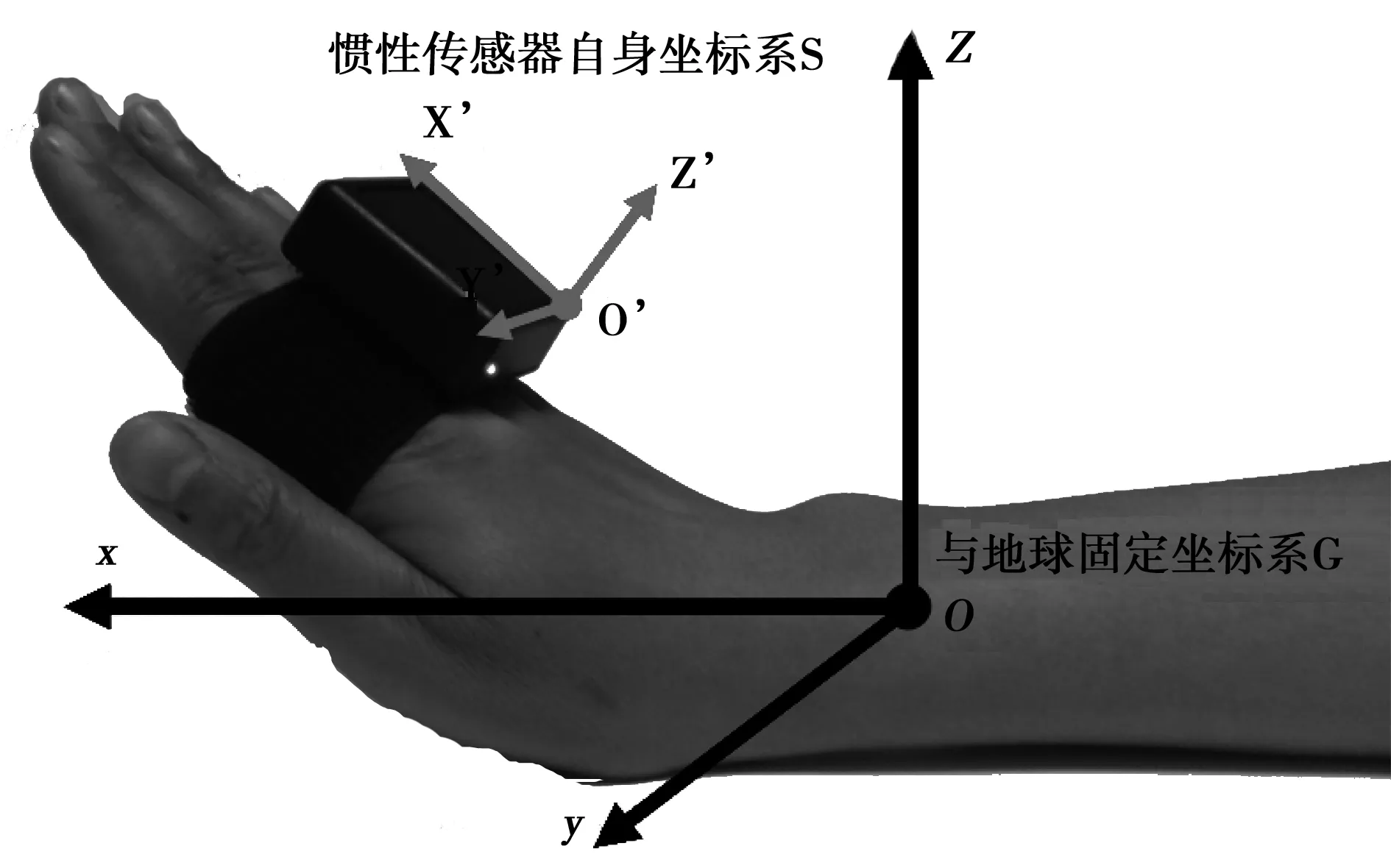
圖1 坐標(biāo)系定義
1.2系統(tǒng)組成
1.2.1系統(tǒng)硬件 內(nèi)部結(jié)構(gòu)如圖2,主要包括慣性傳感器部分、 ARM處理器部分及藍(lán)牙無(wú)線傳輸部分。慣性傳感器部分包括正交配置的3個(gè)微陀螺儀、3個(gè)微加速度計(jì)和3個(gè)微磁力計(jì)。它們直接固聯(lián)于運(yùn)動(dòng)環(huán)節(jié)上 ,測(cè)得信號(hào)是沿運(yùn)動(dòng)環(huán)節(jié)坐標(biāo)系各軸相對(duì)于慣性空間的角速率、線加速度和磁力數(shù)值。采集頻率100 Hz,角速度測(cè)量范圍±1 200°/s,線加速度測(cè)量范圍±16 g,磁力計(jì)測(cè)量范圍±1 200 μT〔3~5〕。所用控制單元采用具有ARM Cortex-M3處理器的32位單片機(jī)STM32F103來(lái)完成控制、數(shù)據(jù)采集與處理、數(shù)據(jù)通訊等功能。線性加速度數(shù)據(jù)通過(guò)歸一法減少由于各軸量度差異引起的誤差。調(diào)整傳感器姿態(tài)變化,使X、Y、Z軸測(cè)試到相應(yīng)的最大值、最小值A(chǔ)xmax、Axmin;Aymax,Aymin;Azmax,Azmin。歸一法公式如下:
(1)
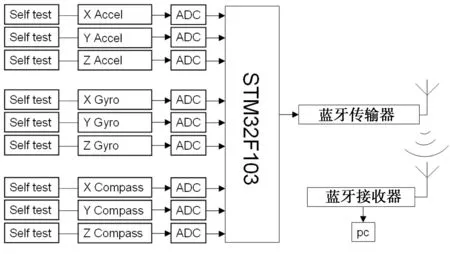
圖2 姿態(tài)測(cè)量系統(tǒng)內(nèi)部結(jié)構(gòu)
其中Ax′、Ay′、Az′分別為X、Y、Z軸實(shí)測(cè)數(shù)據(jù),Ax、Ay、Az為歸一化后數(shù)據(jù)。陀螺儀采用三維轉(zhuǎn)合全溫標(biāo)定和最小二乘直線擬合,來(lái)修正陀螺儀積分角度誤差,減少陀螺儀的漂移影響。
磁力計(jì)通過(guò)立體8字校準(zhǔn)方法,確定固定磁場(chǎng)干擾矢量的大小及方向。使需要校準(zhǔn)的傳感器在空中做8字晃動(dòng),盡量多地讓傳感器法線方向指向空間的所有8個(gè)象限,通過(guò)足夠的樣本點(diǎn)求出固定磁場(chǎng)干擾矢量的大小及方向。公式如下:
(Mx-γx)2+(My-γy)2+(Mz-γz)2=R2
(2)
其中Mx、My、Mz分別為X、Y、Z軸實(shí)測(cè)數(shù)據(jù),γx、γy、γz分別為固定磁場(chǎng)干擾矢量在X、Y、Z軸上的分量,R為常量〔6~9〕。通過(guò)卡爾曼濾波對(duì)采集的數(shù)據(jù)融合,使采集的數(shù)據(jù)更接近真實(shí)值〔10,11〕。為了避免歐拉角形式產(chǎn)生的萬(wàn)向軸鎖死,構(gòu)造的姿態(tài)數(shù)據(jù)采用四元數(shù)形式。求解方程如下:
(3)
q是四元數(shù)矢量,ωx、ωy和ωz是ω的分量。解上述方程,獲得四元數(shù)形式表示的姿態(tài)。由于四元數(shù)形式不能直觀表示各軸角度變化,將四元數(shù)轉(zhuǎn)化為歐拉角形式,公式如下:
(4)
其中,q0、q1、q2和q3是q的分量。φ、θ、ψ分別表示歐拉角的自轉(zhuǎn)角、俯仰角和航向角,定義如圖3。
最后將導(dǎo)航參數(shù)處理成所需的數(shù)據(jù)格式。為數(shù)據(jù)添加數(shù)據(jù)頭和校驗(yàn)位,以減少藍(lán)牙無(wú)線傳輸時(shí)可能出現(xiàn)的誤讀操作。通過(guò)藍(lán)牙發(fā)射端發(fā)射,無(wú)線傳輸給連接在電腦的藍(lán)牙接收端,數(shù)據(jù)進(jìn)入運(yùn)行于電腦上的軟件。
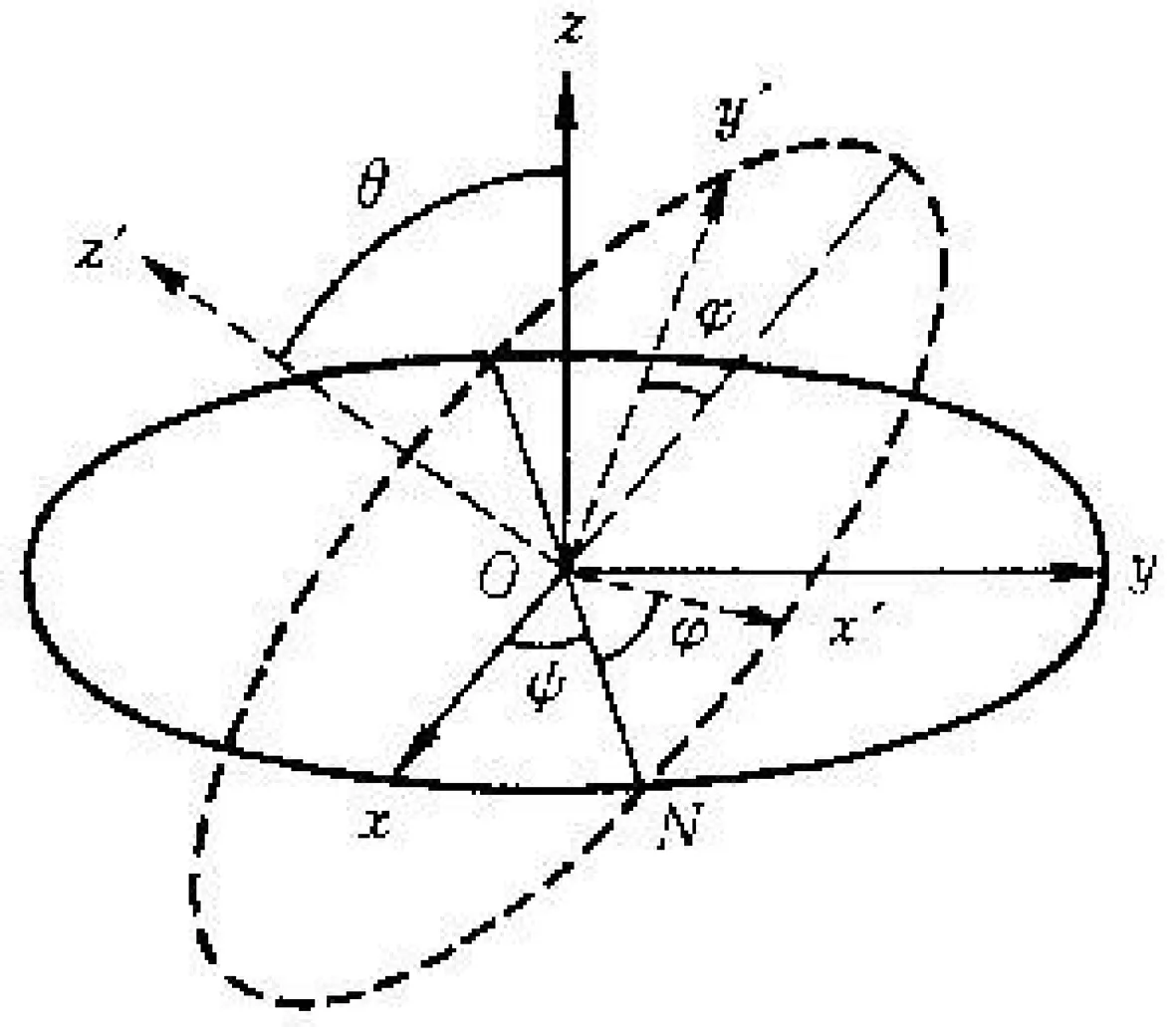
圖3 歐拉角定義
1.2.2系統(tǒng)軟件 可在windows操作系統(tǒng)平臺(tái)上運(yùn)行,利用VC++6.0語(yǔ)言編寫而成。包括受試者數(shù)據(jù)庫(kù)、測(cè)試界面和測(cè)試結(jié)果分析界面三個(gè)模塊,如圖4。受試者數(shù)據(jù)庫(kù)管理受試者信息,包括姓名、性別、年齡、身高、體重等。可便捷地對(duì)受試者信息進(jìn)行新增、修改、刪除、查找等操作。測(cè)試界面包括控制窗口,測(cè)試環(huán)節(jié)OPENGL三維骨骼顯示,測(cè)試數(shù)據(jù)柱狀圖顯示,曲線圖顯示,目標(biāo)角度、重建角度、差值等數(shù)據(jù)顯示。在軟件中顯示的數(shù)據(jù)名稱會(huì)根據(jù)實(shí)際測(cè)試關(guān)節(jié)而自動(dòng)變化。如在測(cè)試頸椎本體感覺時(shí),歐拉角中的俯仰角、自轉(zhuǎn)角和航向角分別對(duì)應(yīng)頸椎的屈伸、側(cè)屈、旋轉(zhuǎn)關(guān)節(jié)角度,軟件測(cè)試界面如圖5。測(cè)試結(jié)果分析界面包括單人縱向和多人橫向數(shù)據(jù)分析,數(shù)據(jù)顯示包括數(shù)值顯示、二維和三維柱狀圖、曲線圖、餅圖等形式,盒子圖、疊加圖和散點(diǎn)圖等,并可打印。
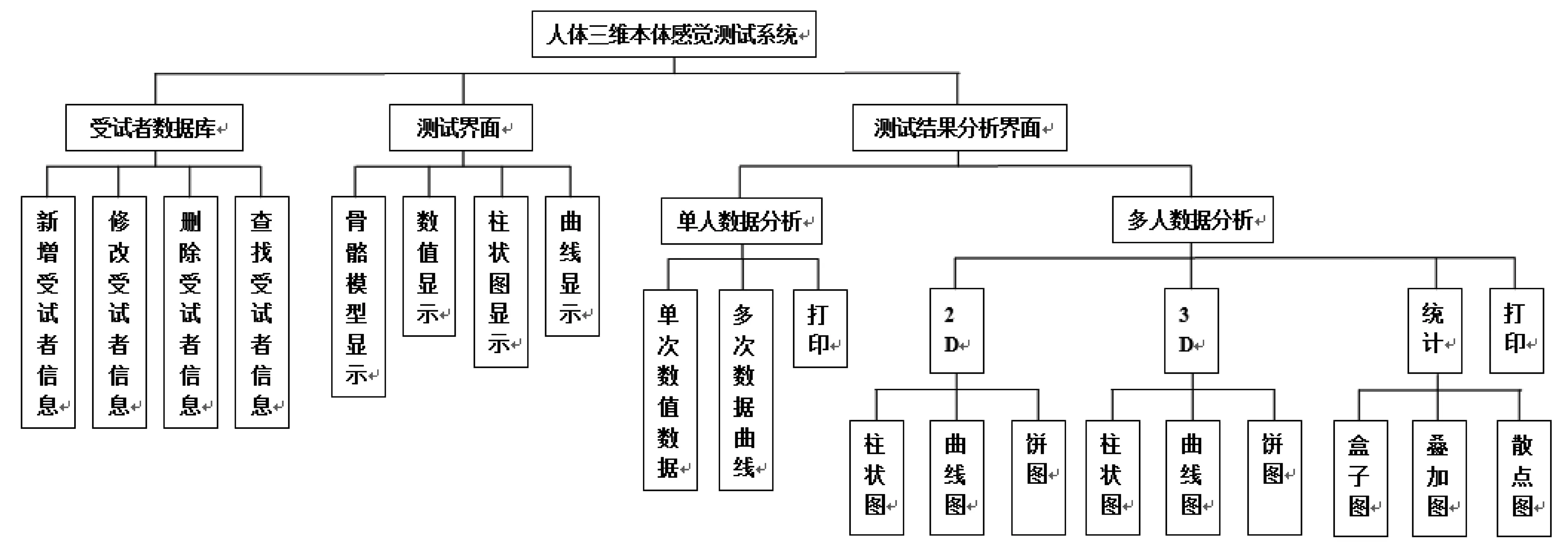
圖4 老年人三維本體感覺測(cè)試系統(tǒng)軟件結(jié)構(gòu)圖

表1 8名受試者本系統(tǒng)和BIODEX獲得目標(biāo)角度和重建角度之間差值對(duì)比±s,°)
圖5 老年人三維本體感覺測(cè)試系統(tǒng)軟件測(cè)試界面
2 實(shí)驗(yàn)測(cè)試及有效性檢驗(yàn)
2.1測(cè)試 將受試者測(cè)試關(guān)節(jié)的近端環(huán)節(jié)固定,慣性傳感器通過(guò)綁帶綁在測(cè)試關(guān)節(jié)的遠(yuǎn)端環(huán)節(jié)上。給受試者帶上眼罩和耳麥,屏蔽視覺和聽覺對(duì)本體感覺測(cè)試結(jié)果的影響。操作系統(tǒng)軟件,進(jìn)入受試者數(shù)據(jù)庫(kù),錄入受試者的信息;進(jìn)入測(cè)試界面,單擊開始按鈕,建立傳感器和電腦之間的連接。使受試者測(cè)試關(guān)節(jié)保持中立位,單擊初始化按鈕,使三軸角度值歸零。受試者在聽到開始指令后,主動(dòng)將測(cè)試關(guān)節(jié)運(yùn)動(dòng)于某一屈曲角度,作為目標(biāo)角度,停留3 s,并按下手持按鈕,使電腦軟件記錄當(dāng)前角度值,作為目標(biāo)角度數(shù)值。讓受試者注意感受關(guān)節(jié)的位置,然后再令受試者返回測(cè)試關(guān)節(jié)中立位,通過(guò)主動(dòng)運(yùn)動(dòng)并依靠自我判斷重建上述角度,并按下手持按鈕,使電腦記錄下當(dāng)前角度值,作為實(shí)測(cè)角度數(shù)值。最后,電腦軟件會(huì)自動(dòng)計(jì)算目標(biāo)角度和重建角度在三個(gè)軸上的差值,用來(lái)反映角度重建的精確度〔12~15〕。
2.2有效性檢驗(yàn) 隨機(jī)抽取8名男性老年人,年齡(67.5±3.11)歲,身高(170.25± 3.82)cm,體重(72.11±3.45)kg,每個(gè)老年人都通過(guò)BIODEX和老年人三維本體感覺測(cè)試系統(tǒng)兩種儀器進(jìn)行右膝關(guān)節(jié)本體感覺測(cè)試。采用SPSS軟件進(jìn)行正態(tài)性檢驗(yàn)分析及配對(duì)t檢驗(yàn)〔19,20〕。膝關(guān)節(jié)角度定義為大腿和小腿之間夾角,起始角度90°,目標(biāo)角度120°,每人記錄3次結(jié)果,取平均值。用獲得目標(biāo)角度和重建角度之間的差值來(lái)反映角度重建的精確度〔16~18〕。兩組結(jié)果沒有顯著差異(t=0.786,P=0.458)。見表1。
3 討 論
本研究研發(fā)的老年人三維本體感覺測(cè)試系統(tǒng)能夠測(cè)試各關(guān)節(jié)的三維本體感覺,尤其是小關(guān)節(jié)本體感覺,能方便攜帶到康復(fù)大廳、病房等場(chǎng)合,在老年人健康評(píng)估、康復(fù)進(jìn)程監(jiān)控、傷殘?jiān)u定等多個(gè)方面都有非常重要的應(yīng)用。
4 參考文獻(xiàn)
1紀(jì)仲秋,李建設(shè).運(yùn)動(dòng)生物力學(xué)〔M〕.北京:高等教育出版社,2000:62.
2趙煥彬,李建設(shè).運(yùn)動(dòng)生物力學(xué)〔M〕.北京:高等教育出版社,2008:198.
3黎永鍵,趙祚喜,高俊文.MEMS慣性傳感器ADIS16355在姿態(tài)測(cè)量中的應(yīng)用〔J〕.數(shù)據(jù)采集與處理,2012;4(27):502-5.
4胡士峰,馬建倉(cāng).基于MEMS 陀螺和加計(jì)的微慣性測(cè)量單元研制〔J〕.航空計(jì)算技術(shù),2008;38(6):115-8.
5秦 輝,史步海.一種微慣性測(cè)量系統(tǒng)設(shè)計(jì)研究〔J〕.電子工藝技術(shù),2009;30(1):32-4.
6Kim S,Crassidis JL,Yang C,etal.Kalman filtering for relative spacecraft attitude and position estimation〔J〕.J Guidance Control Dynam,2007;30(1):133-43.
7Ang WT,Khosal PK,Riviere CN.Nonlinear regression model of a low-g MEMS accelerometer〔J〕.IEEE Sensor J,2007;1(7):81-7.
8Song LJ,Qin YY.Six position testing of MEMS accelerometer〔J〕.Measur Control Technol,2009;28(5):11-3.
9Johann B,Lauro O,Surat K.Heuristic reduction of Gyro drift for personnel tracking system〔J〕.J Navig,2008;62(1):41-58.
10陳 哲.捷聯(lián)慣導(dǎo)系統(tǒng)原理〔M〕.北京:中國(guó)宇航出版社,1986:35-80.
11陳永冰,鐘 斌.慣性導(dǎo)航原理〔M〕.北京:國(guó)防工業(yè)出版社,2007:13-23.
12Panics G,Tallay A,Pavlik A,etal.Effect of proprioception training on knee joint position sense in female team handball players〔J〕.Br J Sports Med,2008;42(6):472-6.
13張秋霞,花秀琴,施永健,等.踝關(guān)節(jié)本體感覺的測(cè)量方法研究與應(yīng)用〔J〕.中國(guó)組織工程研究與臨床康復(fù),2011;15(35):6619-23.
14Nagai T,Sell TC,Abt JP,etal.Reliability,precision,and gender differences in knee internal/external rotation proprioception measurements〔J〕.Phys Ther Sport,2012;13(7):233-7.
15Changa AT,Lee SJ,Zhao H,etal.Impaired varus valgus proprioception and neuromuscular stabilization in medial knee osteoarthritis〔J〕.J Biomech,2014;47(2):360-6.
16Panichia R,Botti FM,F(xiàn)erraresi A,etal.Self-motion perception and vestibulo-ocular reflex during whole body yaw rotation in standing subjects:the role of head position and neck proprioception〔J〕.Hum Mov Sci,2011;30(2):314-32.
17Bock O,Thomas M.Proprioception plays a different role for sensorimotor adaptation to different distortions〔J〕.Hum Mov Sci,2011;30(3):415-23.
18Randa MK,Wang L,Müsseler J,etal.Vision and proprioception in action monitoring by young and older adults〔J〕.Neurobiol Aging,2013;34(7):1864-72.
19Jua YY,Liu YC,Cheng HY,etal.Rapid repetitive passive movement improves knee proprioception〔J〕.Clin Biomech,2011;26(2):188-93.
20Fautrellea L,Gueugnon M,Barbieri G,etal.Inter-hemispheric remapping between arm proprioception and vision of the hand is disrupted by single pulse TMS on the left parietal cortex〔J〕.Brain Cogn,2013;82(2):146-51.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
保健醫(yī)苑(2022年1期)2022-08-30 08:40:44
保健醫(yī)苑(2022年6期)2022-07-08 01:25:16
保健醫(yī)苑(2022年4期)2022-05-05 06:11:20
中老年保健(2021年4期)2021-08-22 07:10:20
保健醫(yī)苑(2021年7期)2021-08-13 08:47:44
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
