智能視頻監控系統中運動目標跟蹤的研究
2014-09-18 00:16:24許慧芳許亞軍
電視技術 2014年19期
關鍵詞:模型
許慧芳,許亞軍
(太原理工大學信息工程學院,山西太原030024)
作為智能監控的基礎組成部分之一,運動目標跟蹤與目標檢測一樣是監控領域的重要問題和關鍵技術,也是計算機視覺與人工智能研究領域中具有相當挑戰的熱門研究課題之一[1]。智能視頻監控中,運動目標跟蹤是建立在目標有效檢測的基礎上、位于行為描述與理解之前的關鍵技術,它可以為數據融合、圖像理解、場景描述等后續處理提供重要的操作平臺。現階段運動目標跟蹤已經被廣泛地應用在工業生產監督、醫學研究、交通流量觀測監控、自動導航、圖像檢索和恢復、天文觀測等領域。
目標跟蹤的技術思路是利用運動目標的位置、紋理、形狀、顏色、輪廓等特征,采取某些具有特定目的的算法,通過幀圖像之間對應匹配關系確定目標軌跡等相關信息,并對感興趣目標的運動路徑及狀態進行確定,從而實現對視頻序列中運動目標的實時跟蹤[2]。圖像序列目標匹配過程中,具有真正使用價值的跟蹤算法需要滿足三個標準,即能夠在提高跟蹤準確性和魯棒性的同時保證系統運行的實時性。近年來人們從這三個評估因素出發,提出了大量的創新改進的跟蹤算法。由于在不同的應用領域對運動目標跟蹤的要求是不同的,目前為止并沒有一種跟蹤算法能夠兼顧三者,因此有限的時間內目標跟蹤技術還不能達到人類所需的各種場景,還有許多值得研究、改進和完善的問題。
1 基于均值偏移的跟蹤算法研究
均值偏移(Mean-Shift),顧名思義,首先計算規定的起始點的偏移均值量,該數量值就是起始點移動的距離值;將起始點移動之后的位置作為新起點,繼續沿著密度函數的梯度方向移動,最后收斂于一個局部最優點。Mean-Shift是一個連續迭代的循環,實質就是通過迭代不斷地尋找目標的新的位置點。實際應用中,Mean-Shift跟蹤算法的目標模板經常使用圖像的顏色特征來確定,下面就基于顏色特征的Mean-Shift算法在目標跟蹤方面的應用進行具體闡述和推導。
設跟蹤目標的中心在圖像的原點處,并且用矩形表示跟蹤目標,其空間坐標為x*i(i=1,2,…,n),目標顏色空間被均勻地分散在m個直方圖區間。令目標模型的直方圖為 p=[p1,p2,…,pm]T,每個直方圖區間的直方圖計算如下

設候選區域目標的坐標為xi(i=1,2,…,n),它的直方圖表示為q(z)=[q1(z),q2(z),…,qm(z)]T,其中q(z)如下
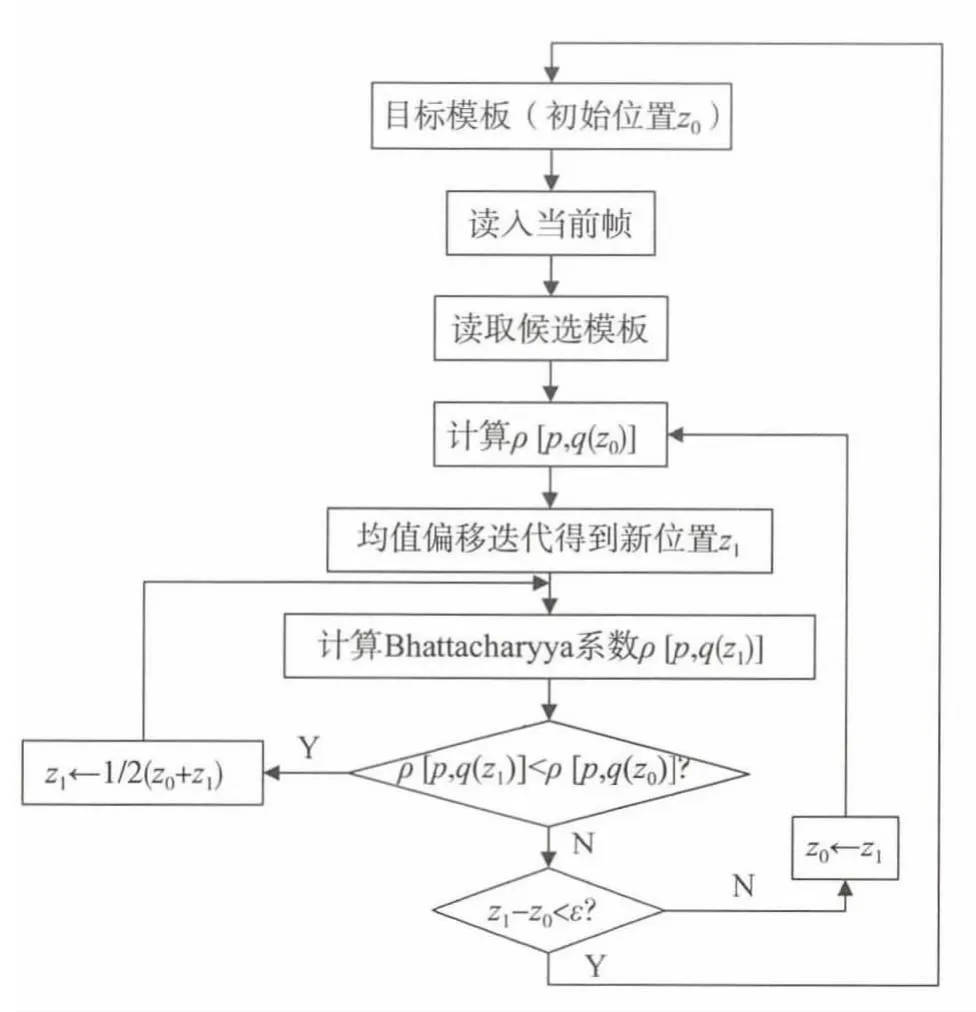
圖1 Mean-Shift算法流程
目標模型與候選目標模型之間的巴氏距離如下

式中:ρ[p,q(z)]即為巴氏系數 Bhattacharyya[3],形式如下

puqu(z)的極小化就是d(z)得極大化。跟蹤目標的初始位置設定為z0,通過推導可以得出

如前所述,Mean-Shift算法是建立在均值偏移矢量連續自動迭代的基礎之上。由算法流程圖1可以看出Mean-Shift算法進行跟蹤主要分為3個步驟:1)初始化搜索窗即設定跟蹤目標窗口,也就是目標模板的大小;2)分別計算目標模板的中心、質心位置,利用均值偏移向量將模板的中心移動到質心位置;3)重復步驟2)中目標模板中心到質心的移動,直至找到Bhattacharyya系數取極大值的位置,即目標的真實位置。
2 基于粒子濾波的跟蹤算法研究
粒子濾波器是基于貝葉斯估計、蒙特卡洛模擬提出的一種實時推理算法。簡單來說,粒子濾波方法是用一組帶權的樣本粒子來表達一個后驗概率分布。樣本點在任意狀態空間進行漂移、擴散、測量等循環過程,最后這些樣本的權重乘以測量概率密度完成重采樣過程,生成新的樣本粒子,并根據給定的當前測量估計其似然度。粒子濾波具有靈活、易實現、并行化等特點,它可以很好地解決非線性、非高斯動態系統問題。下面從貝葉斯估計和蒙特卡洛采樣兩個方面對粒子濾波的原理進行闡述。
2.1 貝葉斯估計
系統模型和測量模型,這兩者是利用貝葉斯估計理論進行動態系統分析必不可少的[4]。其中,系統模型用來表征隨著時間的推移而變形演化的系統狀態,也稱為狀態模型;描述與狀態有關的帶有噪聲的測量模型也即觀測模型。下面先引入兩個狀態方程

式中:ft表示狀態轉換函數;ht表示系統觀測函數;系統在t時刻的狀態由Xt來表征,t時刻對未知系統狀態的觀測由Zt來表征;vt表示系統狀態誤差,nt表示觀測誤差,可模型化為2組獨立同分布不相關的噪聲序列。
貝葉斯估計的根本在于,利用系統模型預測狀態的已知信息得到系統狀態變量的置信程度,也就是后驗概率密度。用Bayes估計理解、認知并研究目標跟蹤,就是在系統測量數據Z1:t已知的情況下,估算系統在t時刻的狀態向量Xt的后驗概率密度函數p(Xt|Z1:t)。如果,假定初始狀態向量X0的先驗概率密度函數為p(X0|Z0),那么通過預測和更新的連續遞歸就應該可以得到系統狀態向量的后驗概率密度函數p(Xt|Z1:t)。
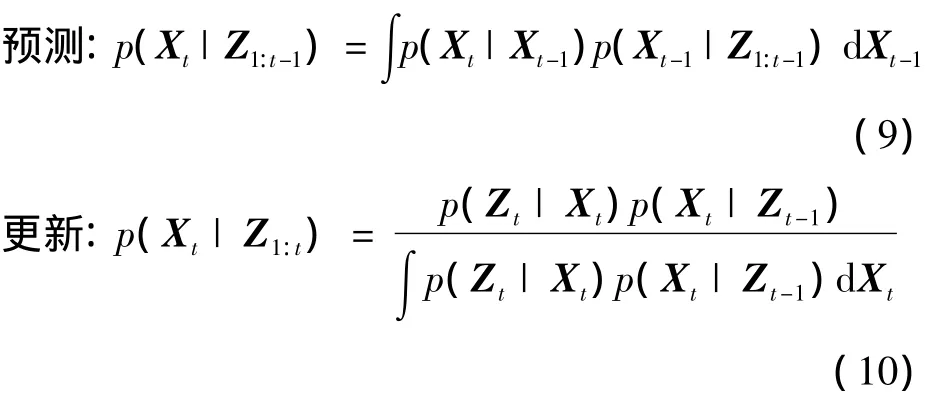
式中:p(Xt|Xt-1,Z1:t-1)=p(Xt|Xt-1)是一階馬爾科夫過程。狀態變化的概率模型p(Xt|Xt-1)由狀態方程決定。p(Zt|Xt)是表示t時刻的系統狀態似然函數。由式(9)和式(10)共同構成了一個由先驗概率密度p(Xt-1|Z1:t-1)到后驗概率密度p(Xt|Z1:t)的遞推過程。
2.2 蒙特卡洛采樣
貝葉斯濾波器的遞推,本文采用非參數化的蒙特卡洛粒子來模擬實現。蒙特卡洛又稱作隨機模擬方法,它利用隨機抽樣的方式來求解問題,其采樣的實質是:采取一組隨機樣本,并給這些樣本賦予權值,然后利用這些樣本、樣本權值以及對樣本的估算,來求得后驗概率分布,也就是狀態的估計值。當樣本數足夠大的時候,蒙特卡洛特性就幾乎等價于后驗概率密度,那么蒙特卡洛粒子濾波器就無限接近于貝葉斯最優估計。圖2為蒙特卡洛采樣下的粒子濾波工作原理示意圖。
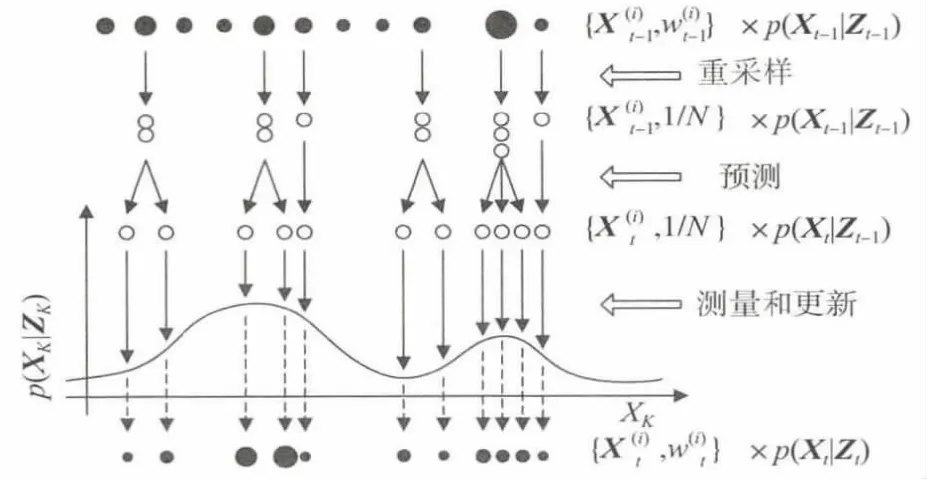
圖2 Particle Filter工作原理示意圖
用集合 S= {,i=1,2,…,N}表示t-1時刻的N個樣本,以及各樣本被賦予的權值,∑=1。獲得系統狀態在k時刻的后驗概率的步驟為:1)對N個樣本進行重采樣;2)利用狀態方程對粒子進行預測;3)利用觀測方程更新粒子權值=p(Xi k|Zk)。可以通過離散加權的辦法求得t時刻的后驗概率密度

由于粒子濾波器的蒙特卡洛性質,粒子數目的多少決定著跟蹤的精確度,粒子數目越多,粒子濾波對后驗概率密度的估計越準確,跟蹤的魯棒性也就越強。相反的是,粒子數目越多,使計算量變大,實時性也變得更差。在實際應用中,通常需要平衡算法的準確性與實時性。
3 融合Mean-Shift的粒子濾波跟蹤算法
歸納起來,Mean-Shift算法計算效率較高,算法復雜度低,實時性也較好,對目標變形有一定適應性,其跟蹤的魯棒性在很大程度上依賴于圖像分析結果的可靠程度。但同時,Mean-Shift算法是一種局部優化方法,有時候不可避免地收斂于局部極值點。在目標跟蹤方面,也就意味著其對目標被局部遮擋、完全遮擋的情形等不適應,并要求目標單幀移動距離不能太大。其次,Mean-Shift算法在目標顏色與背景顏色相近等低背景對比度的情況下,很容易造成目標的丟失,其抗干擾能力和魯棒性都有待增強。
相反,由于粒子濾波器可以很好地解決非高斯非線性系統問題,其在很多方面的表現都比Mean-Shift算法強。最具有對比價值的就是,粒子濾波方法維持了目標的多種假設狀態,具有非常強的處理目標遮擋問題的潛力,而且對低背景對比度下的目標跟蹤也優于Mean-Shift算法。但是,由于粒子濾波的蒙特卡洛特性,在進行目標跟蹤時需要大量的樣本粒子,粒子數目的增加固然可以提高算法的可靠性,可是也使得算法復雜度和計算量急劇上升,進而導致實時性變差,這就需要對算法可靠性與實時性進行平衡折中。其次,濾波中的粒子面臨不斷退化的情況,盡管重采樣算法可以降低退化的影響,但它同時也帶來其他一些問題:粒子都必須被重新計算,重采樣削弱了粒子的多樣性。
基于這些分析,本文認為將Mean-Shift與粒子濾波相結合可以實現優勢互補:粒子濾波可使Mean-Shift避免收斂到局部峰值點,增強抗遮擋性能;Mean-Shift算法的聚類作用可以對粒子重新配置,有效改善粒子退化現象,保證了粒子多樣性,提高了采樣效率,進而有效提高算法的可靠性、魯棒性,使得粒子濾波算法可以用到對實時性要求高的場合。
本節提出的算法是建立在前兩節算法理論的基礎之上,因此算法基本原理不再敘述。重點分析如何將Mean-Shift與粒子濾波完美結合達到優化跟蹤的目的。
首先引入一個概念:聚類分析。聚類分析的核心思想[5]就是依據同類樣本之間的相似性,將一些未標簽的樣本集分成幾個群類,各個樣本群具有各自的相似性。換言之,聚類分析的作用就是匯集同一群類中的樣本數據在一起,同時隔離不同群類中的樣本數據。目前,聚類分析已經在智能控制、故障診斷等很多需要進行大量數據分析的領域產生了巨大影響。多數情況下,聚類分析的使用結合了密度估計方法。均值漂移的聚類作用即屬于此類型。
接下來,要對目標模型更新進行探討。本文采用的是基于顏色直方圖分布的粒子濾波器,它的跟蹤質量極易受到天氣陰晴、光照條件以及可視角度等因素的影響。為了有效抑制干擾降低外界影響,目標更新環節的加入就顯得尤為重要,其作用當然也非同尋常:在目標更新條件驅使下算法自行判斷是否進行目標更新,從而保證當監控場景中存在太多噪聲或發生遮擋時目標模型不被更新,而當目標重新出現時系統能迅速找到目標。這也就是粒子濾波具有處理目標被全遮擋和強抗噪性的原因所在。在此,給出目標更新條件的判決公式

式中:πT是判決門限,大量試驗之后本文取值 0.8;πE[S]為E[S]的觀測概率,E[S]表征樣本集 S={,,i=1,2,…,N}的平均狀態。
以k時刻的模板定義給出模型更新公式

經過如圖2的重采樣之后,采用加權的方式確定目標位置

融合Mean-Shift的粒子濾波算法,就是粒子在經過重采樣和動態模型隨機傳播之后,加入能夠對粒子進行聚集作用的均值漂移算法,使歸屬于不同群類的四面八方樣本粒子向目標的最大化區域邊緣定向移動。所以,可以更新粒子權重的時候最大可能地為每個樣子粒子賦予較大的權重,從而實現使用較少樣本粒子描述較多目標狀態的功能。這樣處理的結果就是,遠離目標區域的粒子能夠盡量地靠近目標,樣本粒子“猜測”的成分降低,算法需要的總迭代次數減少,進而算法計算量大幅下降。圖3為融合Mean-Shift的粒子濾波算法流程圖。
4 實驗結果分析
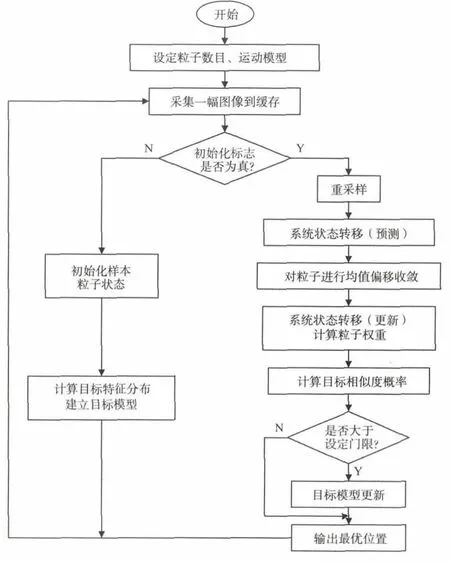
圖3 融合Mean-Shift的粒子濾波算法流程
本文選用PETS2001/DATASET2中的視頻測試序列[6]“CAMERA1”(大小 360 ×240,共 2 825 幀)來驗證算法的有效性。圖4為3種算法跟蹤同一個藍色小車的效果圖,抽取其中的5幀圖像進行分析,3種算法抽取的視頻幀號由上至下依次為第 956,979,1 000,1 008,1 026幀,由左至右分別為均值偏移算法、粒子濾波算法、融合Mean-Shift的粒子濾波算法的跟蹤結果。程序運行環境為 MATLAB 7.10,處理器為 Intel Core i5,主機CPU 2.50 GHz,內存 2 Gbyte。
由第956幀在3種算法下的跟蹤結果圖可以看出,圖像都是目標在正常行駛情況下的跟蹤結果,Mean-Shift算法跟蹤目標邊框相對較大,而另外兩種沒有明顯差別,總體來說3種算法的跟蹤效果都比較滿意。第979幀的跟蹤圖像表示算法在目標被部分遮擋下的表現。由圖可以看出,雖然近端的大樹晃動對目標跟蹤產生了一定的影響,但算法的跟蹤效果沒有受到明顯干擾,只有Mean-Shift算法跟蹤目標邊框依舊相對較大,也反映了Mean-Shift算法跟蹤精度相對較弱的實質。第1 000幀圖像顯示了3種算法在目標被完全遮擋情況下跟蹤的差異,Mean-Shift算法已經完全丟失了目標,而后兩者卻仍然在繼續移動。這就體現了之前分析的Mean-Shift算法對目標完全被遮擋的不適應性,而融合了Mean-Shift的粒子濾波算法由于其蒙特卡洛特性,目標跟蹤仍然可以維持。當跟蹤序列進行到第1 008和1 026幀的時候,Mean-Shift算法已經停滯不前,后兩者能夠迅速搜索到目標并繼續完成目標的跟蹤,并且跟蹤非常準確。這更加充分地說明加入目標模板更新算法對重新搜索、定位并迅速跟蹤目標的重要性。

圖4 3種算法的跟蹤結果對比
由圖4還可以看出,粒子濾波、融合Mean-Shift的粒子濾波兩種算法在跟蹤效果方面幾乎沒太大差別,這是一種錯覺,因為它們執行跟蹤過程所用時間有極大的差距。3種算法所用平均執行時間以及樣本粒子數如表1所示。

表1 3種算法平均執行時間以及所需粒子數
經過多次的跟蹤試驗,得知粒子濾波算法至少需要390個粒子才能獲得相對準確的跟蹤表現。為了保證跟蹤可靠性,實驗中選取了400個粒子。而融合Mean-Shift的粒子濾波算法最少只需要150個粒子。通過仿真,獲知均值漂移跟蹤算法執行時間平均為25.265 3 ms,執行時間最少;粒子濾波跟蹤算法的平均執行時間為276.191 7 ms;而改進后的算法平均執行時間僅需要為89.560 3 ms。第三種算法在150個粒子條件下的跟蹤效果幾乎等同于粒子濾波選用400個粒子的跟蹤效果。正是由于均值漂移對粒子的重新配置,很好地抑制了粒子退化現象,提高了采樣效率,在降低計算量的同時提高了算法的精確度和實時性。
5 總結
本文對智能視頻監控的關鍵技術——運動目標跟蹤進行了研究,提出了一種融合Mean-Shift的粒子濾波目標跟蹤算法,該算法提高了Mean-Shift算法在目標遮擋情況時的工作性能;同時,利用Mean-Shift對粒子樣本的重新配置,降低了計算量,提高了采樣效率,很好地抑制了粒子的退化現象,使得目標跟蹤可靠性增強,提高了運動目標跟蹤算法的實時性和魯棒性。最后在MATLAB上進行了實驗仿真,與傳統的粒子濾波相比較,本方法具有算法復雜度低、魯棒性較好、抗遮擋干擾強等特點,是一種有效的運動目標跟蹤方法,可廣泛應用于實時性要求較高的智能視頻監控技術中。
:
[1]烏恩.智能視頻監控中運動目標檢測與跟蹤算法研究[D].長沙:國防科技大學,2010.
[2] WANG H,WANG J T,REN M W,et al.A new robust objects tracking algorithm by fusing multi-features[J].Journal of Image and Graphics,2009,14(3):489-498.
[3] KUSHWAHA A K S,SRIVASTAVA R.Performance evaluation of various moving object segmentation techniques for intelligent video surveillance system[C]//Proc.2014 International Conference on Signal Processing and Integrated Networks(SPIN).[S.l.]:IEEE Press,2014:196-201.
[4]袁國武.智能視頻監控中的運動目標檢測和跟蹤算法研究[D].昆明:云南大學,2012.
[5] TISSAINAYAGAM P,SUTER D.Object tracking in image sequences using point features[J].Pattern Recognition,2005,38(1):105-113.
[6] PETS2001,The second IEEE international workshop on performance evaluation of tracking and surveillance[EB/OL].[2014-07-20].http://www.cvg.cs.rdg.ac.uk/PETS2001.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19