類人型五指手構型的優化設計
2014-09-18 06:39:36樊紹巍陳川姜力曾博劉宏邱景輝
哈爾濱工程大學學報 2014年5期
樊紹巍, 陳川, 姜力 , 曾博, 劉宏, 邱景輝
(1. 哈爾濱工業大學 機器人技術與系統國家重點實驗室, 黑龍江 哈爾濱150001;2. 哈爾濱工業大學 電子與信息工程學院,黑龍江 哈爾濱 150001)
類人型五指手的構型是由手指指節的長度、指節運動關系以及手指在手掌上的位置參數決定。而構型設計的優劣決定手的抓取和操作能力。但因其多鏈路特點,導致結構參數多、參數間關聯性強,因此如何設計一組符合功能要求的五指手構型成為五指手設計領域一個很大的難題。目前通常的做法有3種:1)在設計具體機械結構的同時摸索五指手的構型,如文獻[1-6]中先根據設計功能要求以及動力傳動組件等硬件參數建立出三維CAD模型,然后利用CAE軟件完成對主要設計功能的仿真,最后根據仿真結果進一步完善構型設計參數;2)重點對某一兩個相對重要的手指進行參數優化設計,如文獻[7-8]中利用剛體動力學對拇指抓握進行的分析以及文獻[9]中欠驅動兩指抓取的平面幾何學研究;3)研究對比人手的生理特性[10],通過建立和分析人手的DH模型來指導五指手的構型優化設計,缺點是對硬件設備要求較高,且無較強的理論基礎。以上3種方法均不同程度地進行了五指手的構型優化設計,而采用基于形封閉理論的設計方法,相比之下具有優化參數全面、可維護性強以及成本低的特點,從而為五指手構型的優化設計提供了一種新的思路。
五指手的抓取從功能上可分為強力抓取和精巧抓取2種,前者又可細分為球形抓取、圓柱形抓取和鉤形抓取[7,11]。相對于其他抓取形式,球形抓取和圓柱形抓取所涉及的手指最多,抓取的范圍也最大,功能實現也最為復雜。這2種強力抓取成功與否直接決定了五指手構型設計的合理程度。形封閉是單純從幾何結構參數的角度出發來判斷抓取的結果[12-13],相對于力封閉而言條件更強,符合形封閉設計要求的假手抓取范圍更大、適應性更好,并被經常用來作為抓取參數優化的理論依據。
五指手構型設計除了理論分析計算得到構型參數外,還受到機構設計、電機選型以及功能要求的限制[14-15]。因此,本文結合上述限制條件,基于形封閉策略及參數的范數域寬對其參數進行優化,從而保證類人型的同時增加五指手的抓持穩定性。
1 形封閉性的判定原理

(1)
定義抓取G的形封閉判別函數J0(G)為下列線性規劃問題的最小值[16]。
(2)
其中,可行集Ω0是下列不等式組的集合:
(3)
式中:i=1,2,...,m;j=1,2,...,n,n+1;y=[y1y2...yn]T和yn+1是人工控制變量;m、n分別是接觸點線矢量p的個數和維數。
2 強力抓取的形封閉性分析
2.1 模型假設
在建模過程中,剔除一些對結果影響小,卻大大增加算法復雜度的參數,假設如下:
1) 被抓物體是絕對剛體,且接觸面沒有摩擦;
2) 五指均為全耦合設計,且耦合比為1∶1;
3) 近指節和中指節為通用指節,無名指和食指相對中指對稱;
4) 五指和被抓物體的接觸點在五指的幾何中心面內;
5)手指遠指節和中指節夾角很小,忽略不計。
五指手的構型簡圖如圖1所示(圖1中僅表示出了拇指和食指的參數,其余3指與食指類似)。
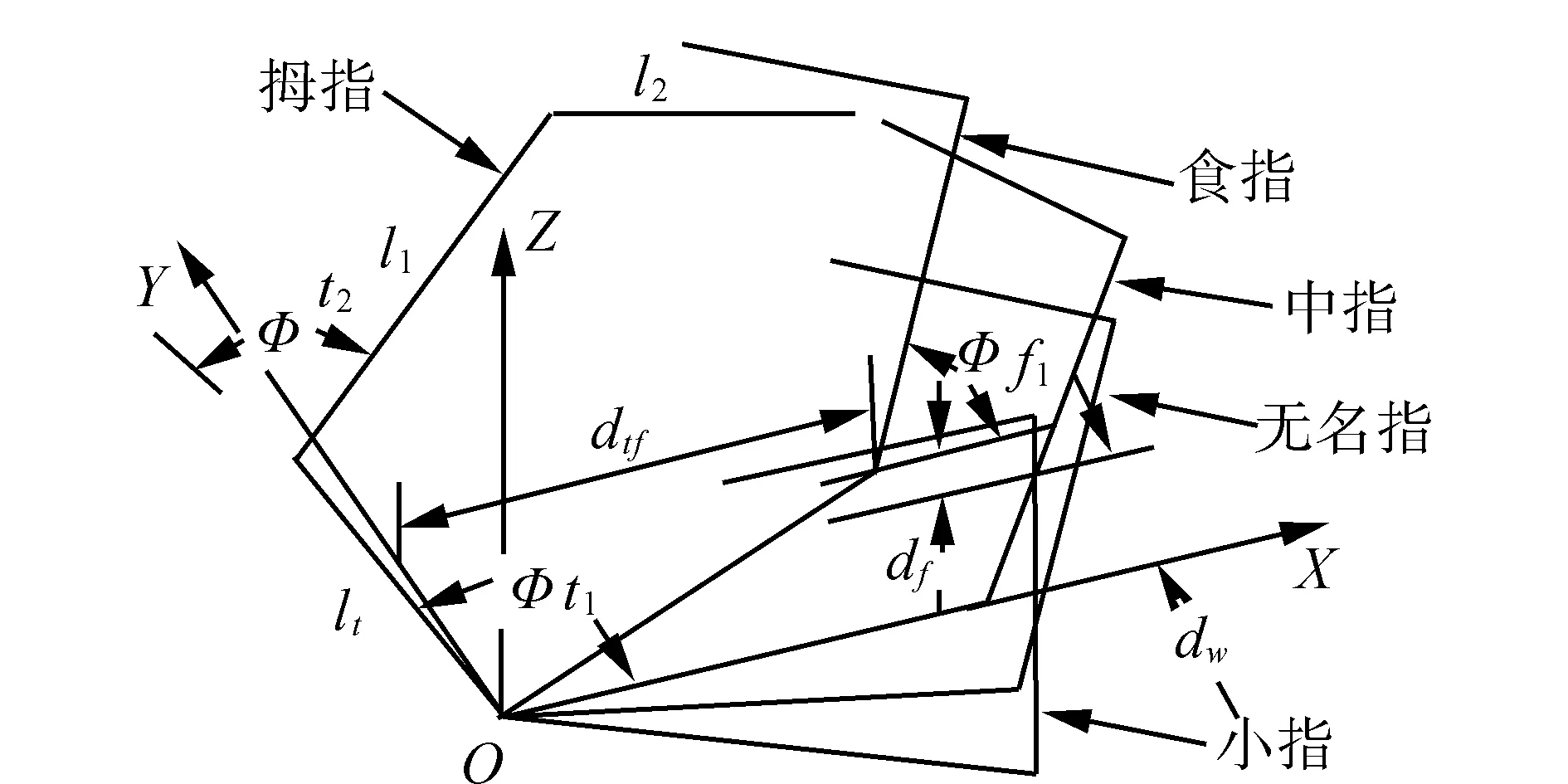
圖1 五指手構型
2.2 圓柱形抓取和相對形封閉分析
相對形封閉是形封閉在二維空間下的特例,此時點接觸線矢量p的維數為3,且同樣適用于J0(G)判別函數判別原理。
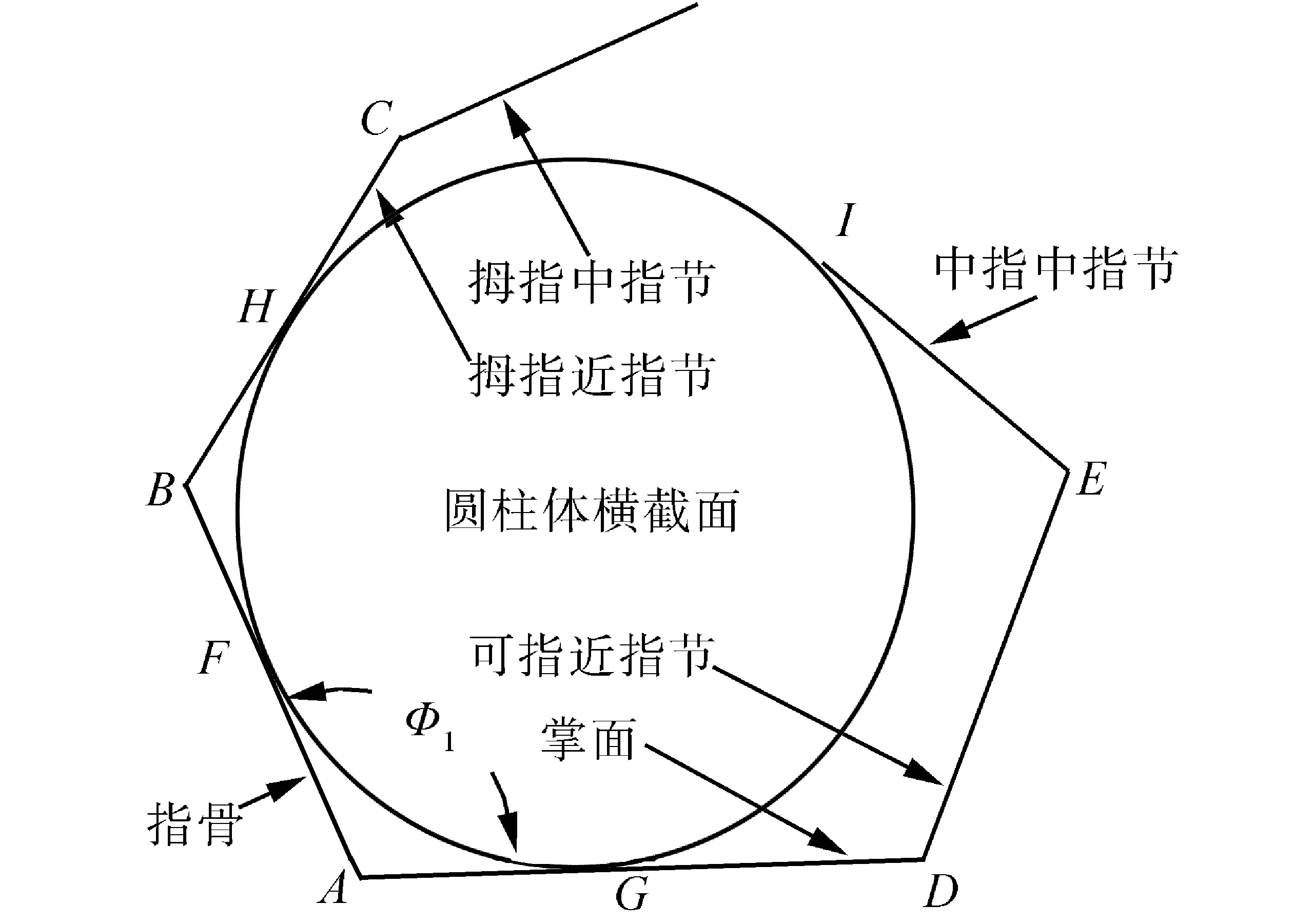
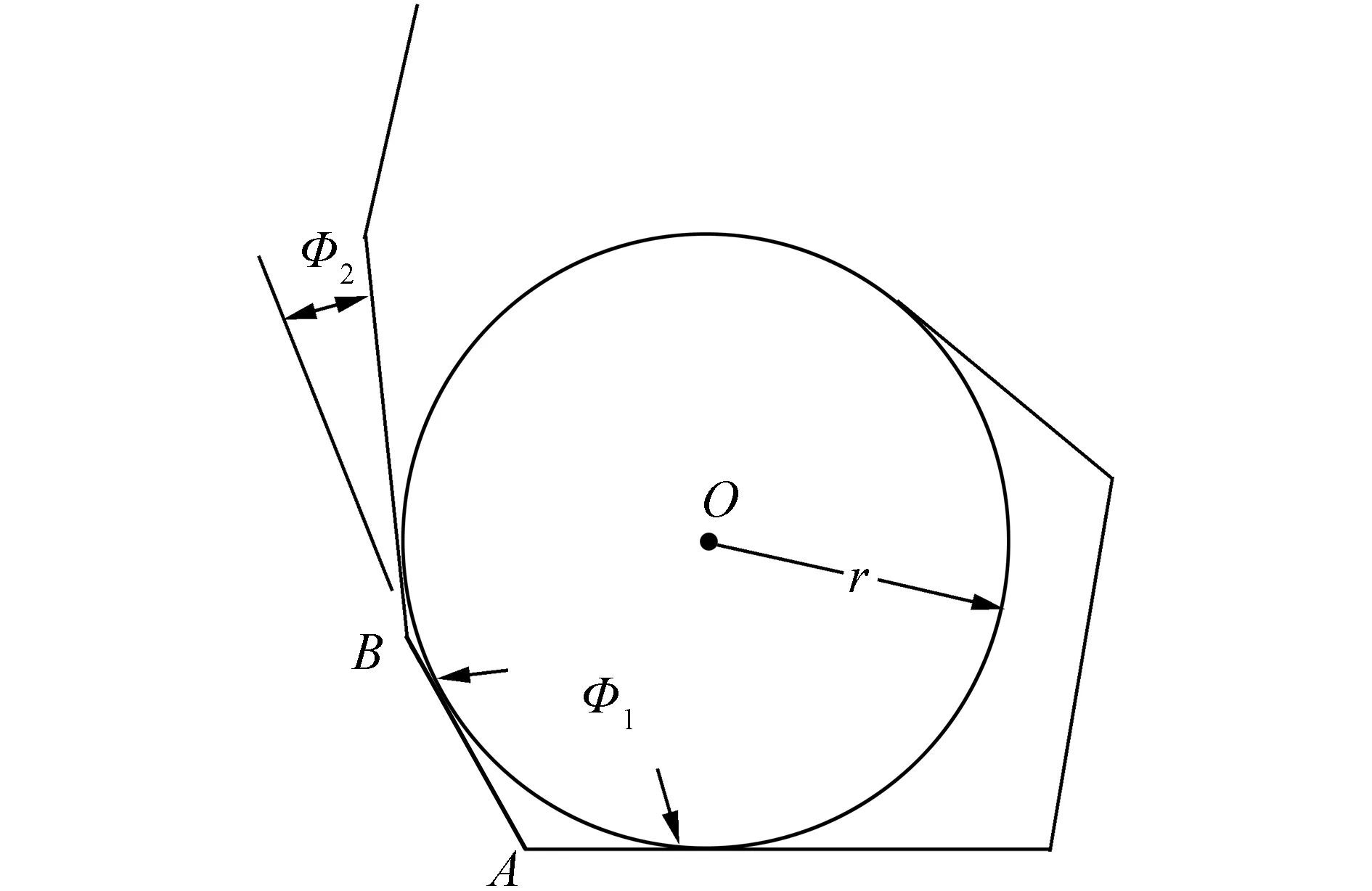
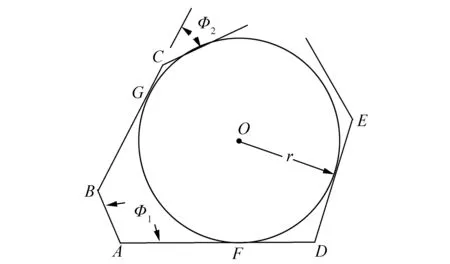
圖2 圓柱形抓取
當假手強力抓取圓柱形物體時,被抓物體的理論截面為圓形,因此位于拇指-掌面-中指所在平面的圓形截面滿足相對形封閉判據時,則近似認為五指手對該半徑下的圓柱體抓取符合相對形封閉要求,如圖2,相對形封閉分析的流程圖如圖3。
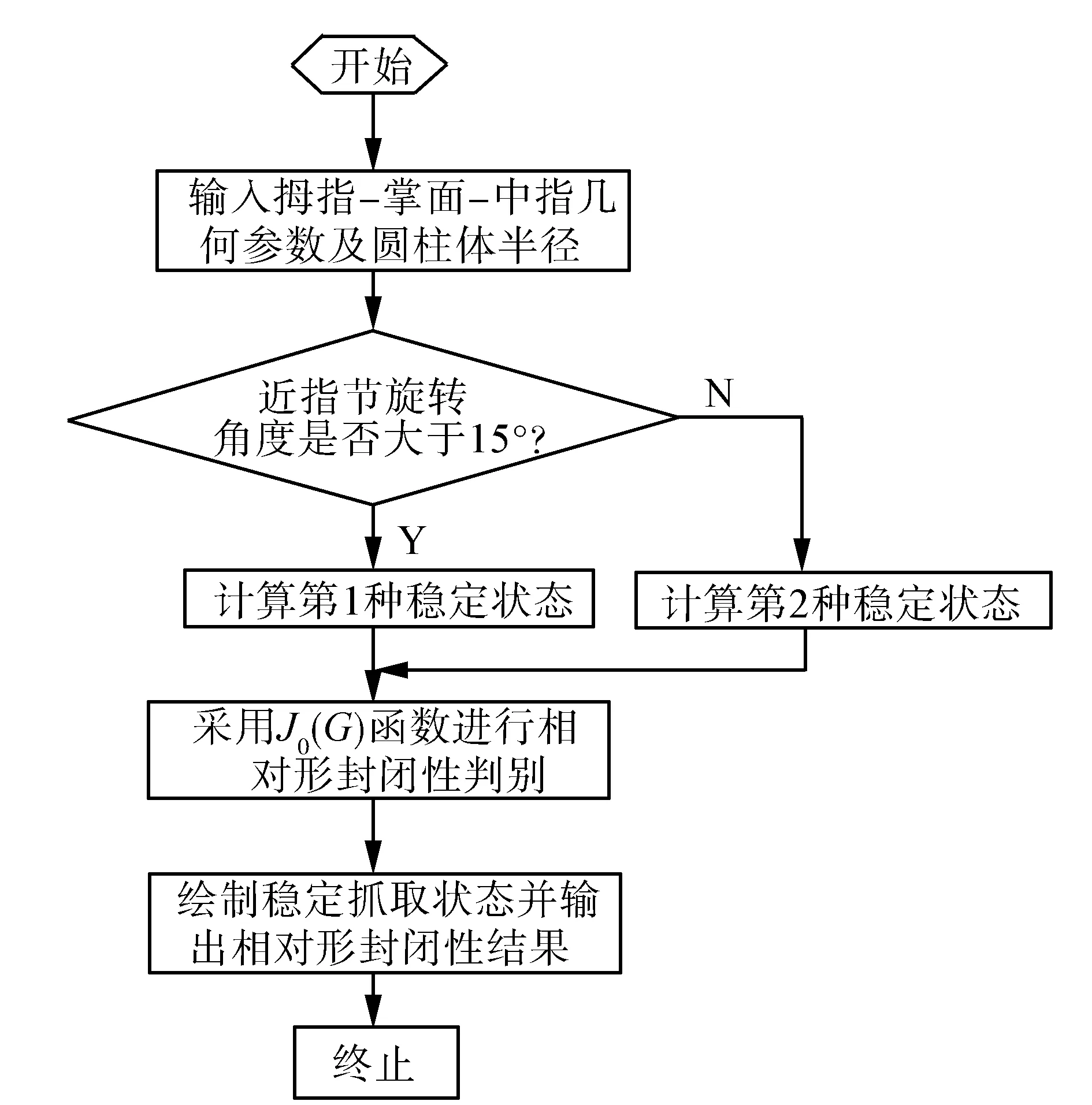
圖3 相對形封閉性分析流程圖
具體分析過程如下:
1)保持指骨和掌面間的夾角φ1恒定,依次計算出接觸點F和G;
2)判別是否滿足形封閉要求;
3)若AB、r及φ1滿足式(4)時,可實現如圖4(a)抓取穩定狀態:
(4)
若滿足
(5)
可實現如圖4(b)抓取穩定狀態,并由
(6)
(7)
(8)
確定接觸點F和G的位置和轉角φ2的值。
4)再次循環J0(G)判別函數。
(a) 狀態1
(b) 狀態2
2.3 球形抓取和形封閉
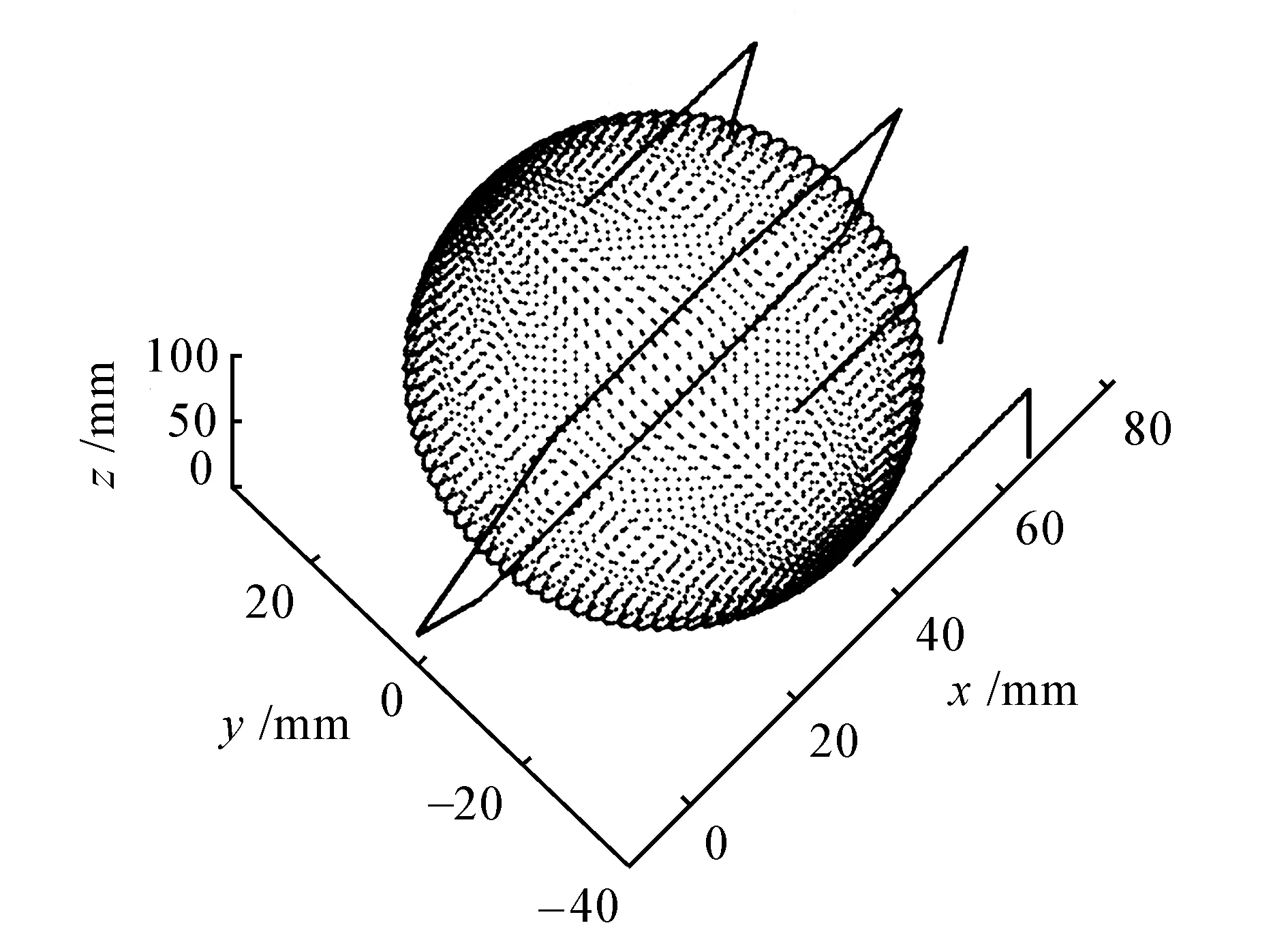
球形抓取屬于三維形封閉問題,所以點接觸線矢量p的維數為6,且同樣適用于J0(G)判別函數判別原理,其相對形封閉分析的流程圖如圖5。
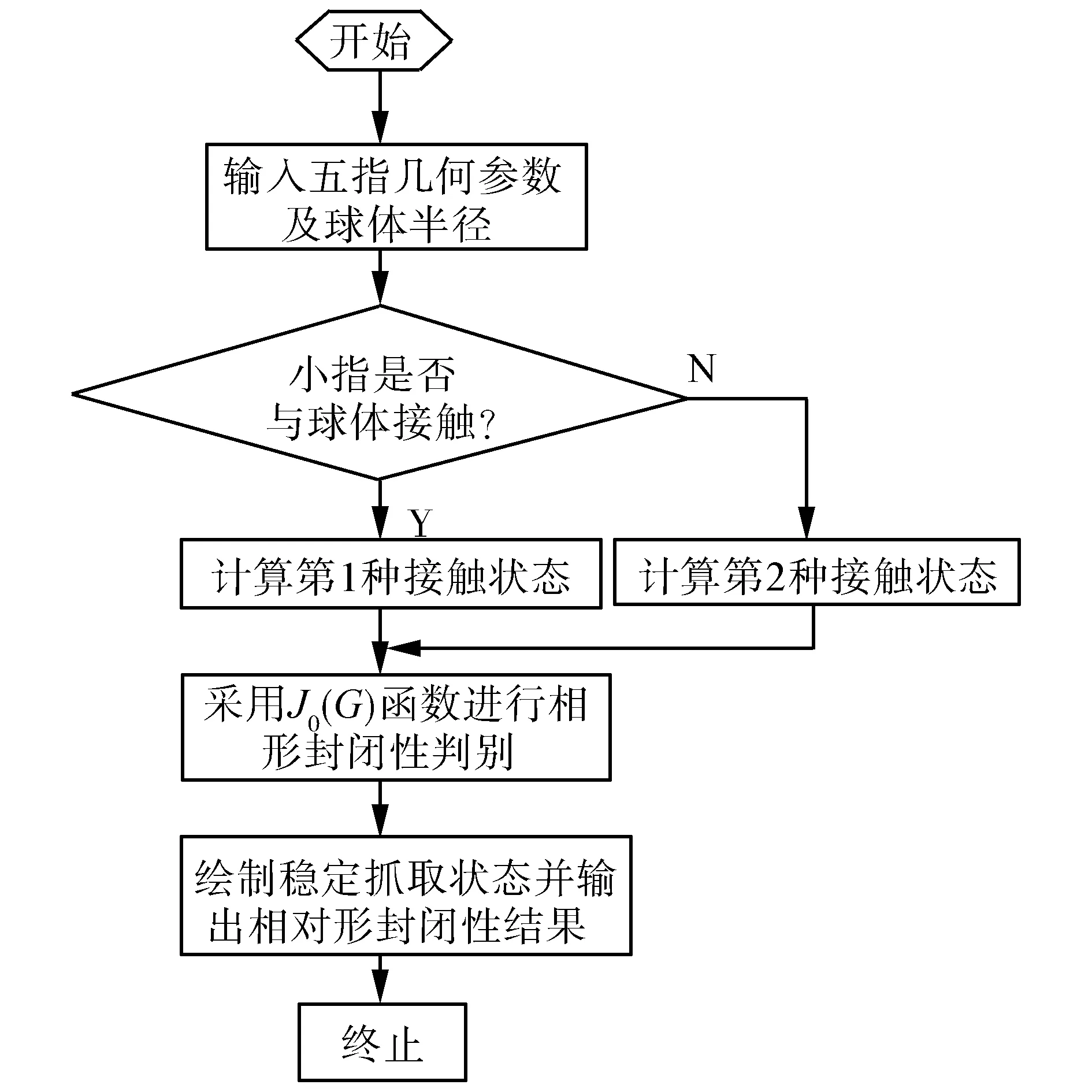
圖5 形封閉性分析流程圖
(a) 小指不接觸球體
(b) 小指接觸球體
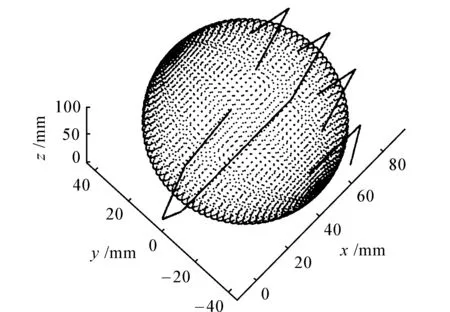
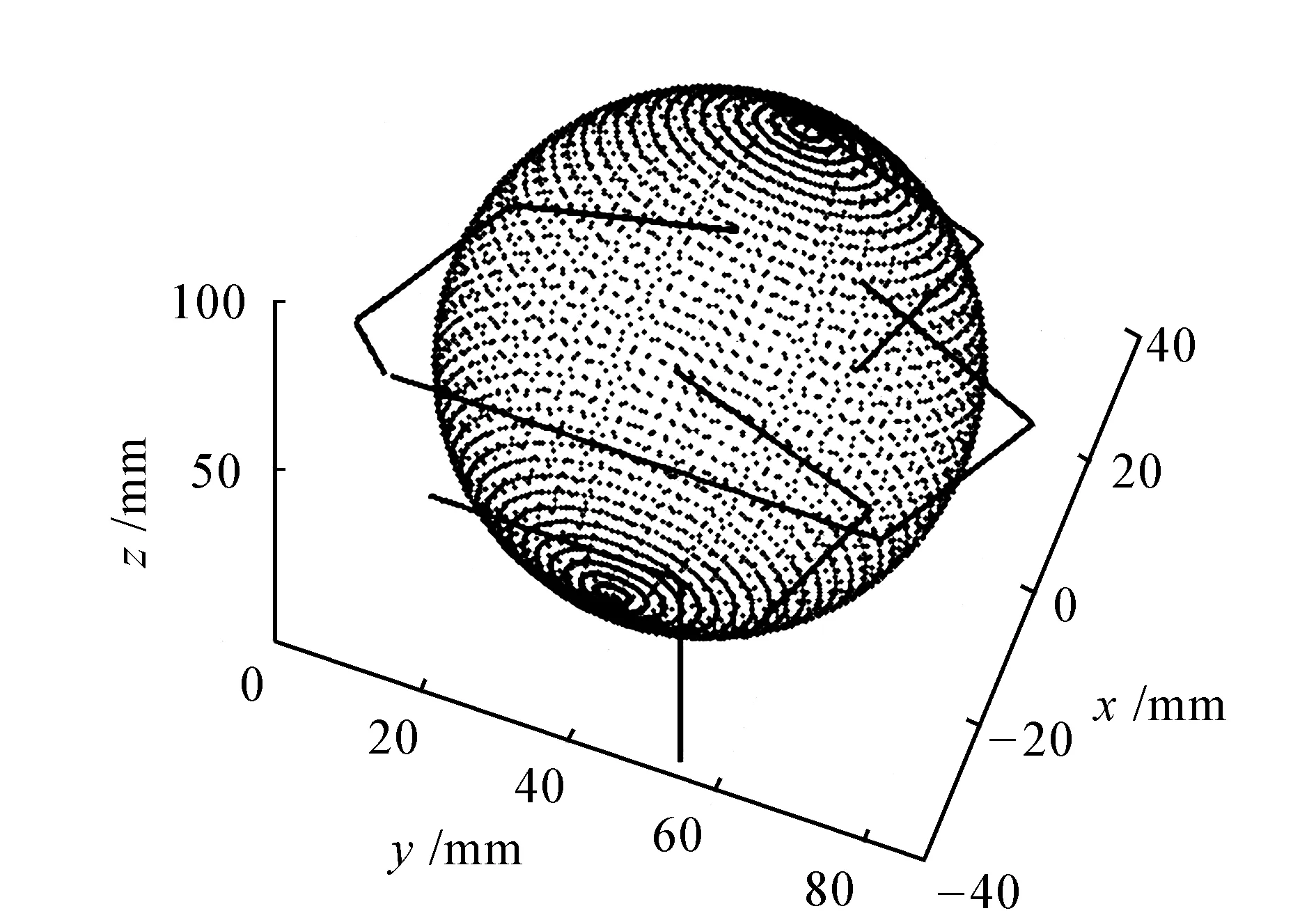
結合上述假設情況使球體的最大截面和拇指-掌面-中指所在面重合,依次計算各個手指和球體的接觸點,并使用J0(G)判別函數進行三維形封閉性分析。穩定判別分為rb≤2Lp時6點接觸和rb≥2Lp時7點接觸2種情形。其中rb為球體直徑,Lp為手掌寬度。 抓取仿真如圖6所示。其他計算過程和圓柱形抓取類似,不再贅述。
3 五指手構型優化設計
3.1 參數優化設計性能指標
如上所述,最大可行區間是在一定的抓取環境且符合抓取形封閉性的前提下,單一參數進行改變的最大區間。定義某參數i的域寬δi為其最大可行區間長度除以區間中點的絕對值,它是一個無量綱區間參數,客觀的描述了不同參數的最大可行區間的相對大小。定義n個參數的范數域寬δ為
(9)
δ值能夠反映該組參數的最優程度。實驗證明,若所選參數正好位于其最大可行區間中點,則該組參數δ值最大。采用區間迭代算法找到n個給定的處于最大可行區間中點的參數,優化迭代過程可簡化描述為:基于區間迭代算法對n個參數分別進行可行區間迭代,得到參數的無量綱區間參數δi及中間值后,計算n個參數變換后的δ值后,再重復進行迭代直至最大可行區間不再變化。
3.2 區間最大化實例
為了直觀表述上述方法,以半徑35 cm的球形抓取為例,選擇五指手的11個參數中的5個關鍵參數作為優化的目標參數。其初始數值、迭代過程以及最終優化結果如圖7、8所示。 為了表述優化后手指構型的泛化能力,選取5組半徑球體進行迭代實驗,其優化的前后范數域寬δa、δb及增長率γ如表1所示。優化后的抓握仿真及效果如圖9所示。
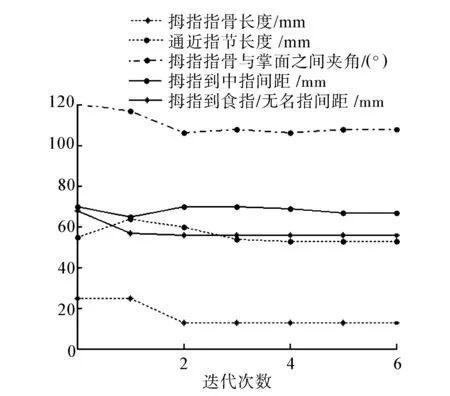
圖7 迭代過程
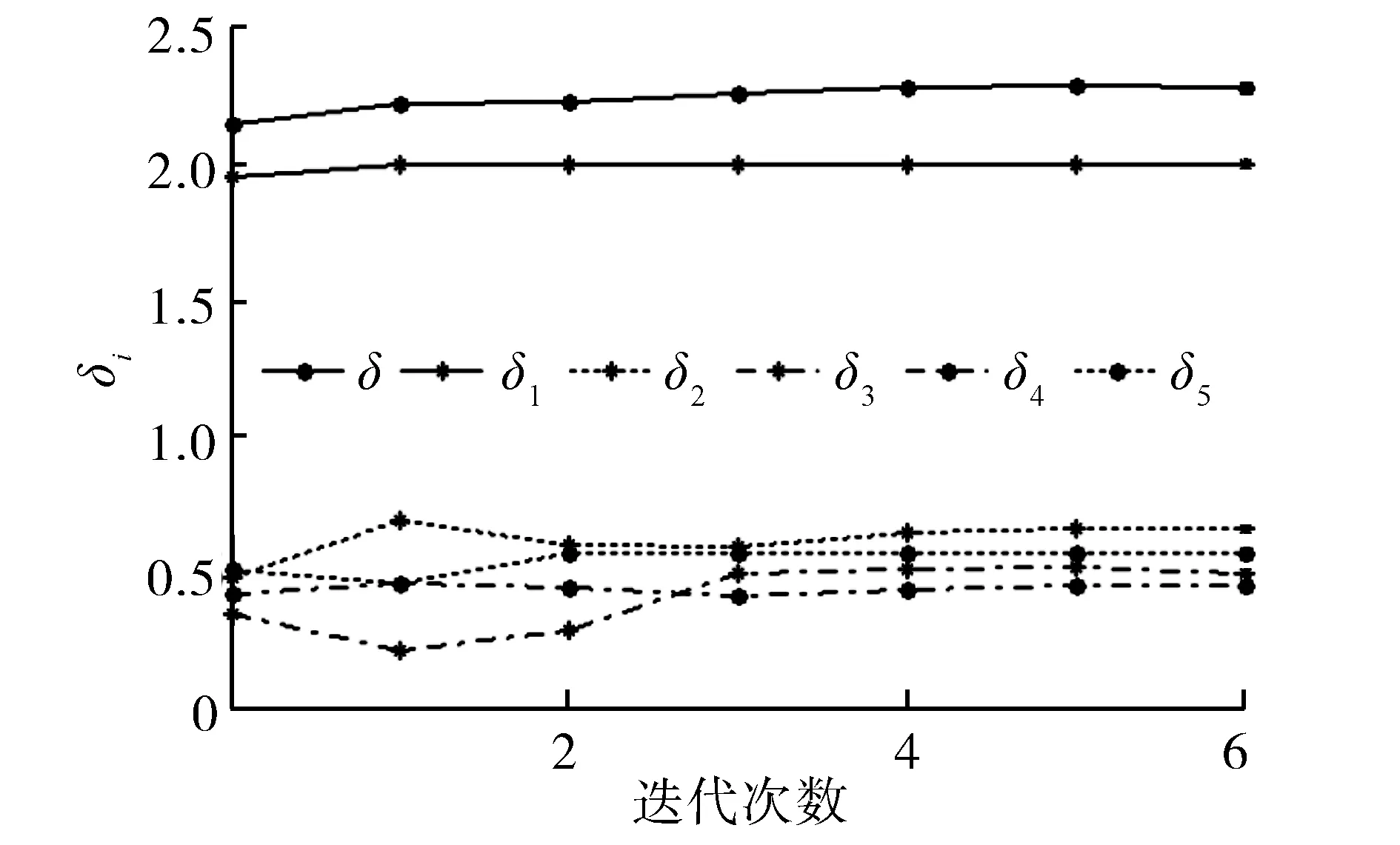
圖8 構型參數域寬
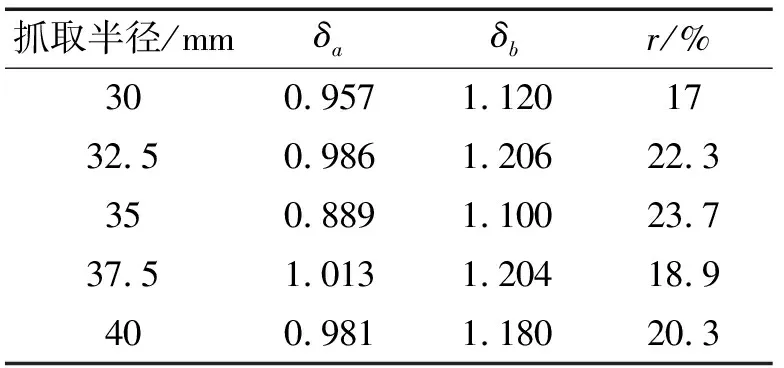
表1 迭代試驗結果
(a) 基于優化參數的抓取構形仿真

(b) Adams抓取示例
4 結論
本文給出了五指手構型設計合理性的評價標準,以及構型參數設計合理性的方法,對于類人型五指機器手具有實際操作性,結果表明:
1)針對抓持性物體,基于幾何形封閉理論優化的五指手抓取構型能夠提升假手的抓持能力。為后繼的抓取分析提供了有力的理論支撐。
2)范數域寬的引入為手掌構型及手指參數的合理性提供了評價指標
3)最大可行區間通過不同參數的域寬能夠判斷出不同參數之間的最大可行區間的相對大小,從而在后期機械設計選型時做到有的放矢。
參考文獻:
[1]HUANG Hai, JIANG Li, PANG Yongjie, et al. Observer-based dynamic control of an underactuated hand[J]. Advanced Robotics,2010, 24:123-137.
[2]BENNET D A, DALLEY S A, GOLDFARD M. Design of a hand prosthesis with precision and conformal grasp capability[C]// 34th Annual International Conference of the IEEE EMBS. San Diego, USA, 2012:3044-3047.
[3]DALLEY S A, WISTE T E, VAROL H A, et al. A multigrasp hand prosthesis for transradial amputees[C]// 32nd Annual International Conference of the IEEE EMBS. Buenos Aires, Argentina, 2010:5062-5065.
[4]CIPRIANI C, CONTROZZI M, CARROZZA C.Progress towards the development of the SmartHand transradial prosthesis[C]//IEEE 11th International Conference on Rehabilitation Robotics. Kyoto, Japan, 2009:682-687.
[5]MASSA B, ROCCELLA S, CARROZZA M C,et al. Design and development of an underactuated prosthetic hand[C]// International Conference on Robotics & Automation. Washington, USA, 2002:3374-3379.
[6]HAMMOND F L, WEISZ J, ANDRES A,et al. Towards a design optimization method for reducing the mechanical complexity of underactuated robotic hands[C]// IEEE International Conference on Robotics and Automation. Minnesota, USA, 2012:2843-2850.
[7]WANG Hairong, FAN Shaowei, LIU Hong. An anthropomorphic design guideline for the thumb of the dexterous hand[C]// International Conference on Mechatronics and Automation. Chengdu, China, 2012: 777-782.
[8]黃海, 姜力, 侯琳琪,等. HIT/DLR仿人假手拇指機構的研究[J]. 哈爾濱工程大學學報, 2007, 28(2): 207-211.
HUANG Hai, JIANG Li, HOU Linqi,et al. Thumb mechanism of HIT bio-prosthetic hand [J]. Journal of Harbin Engineering University, 2007, 28(2): 777-782.
[9]KRAGTEN M, FRANS C T, HELM V D, et al. A planar geometric design approach for a large grasp range in underactuated hands[J]. Mechanism and Machine Theory, 2011, 46: 1121-1136.
[10]SHIN S,HAN S,LEE K,et al. A design framework for dexterous robotic hand[C]// International Conference on Ubiquitous Robots and Ambient Intelligence. Incheon, Korea, 2011:539-541.
[11]ZHENG J Z, ROAS S, DOLLAR A M.An investigation of grasp type and frequency[C]// International Conference on Robotics and Automation.Shanghai, China, 2011: 4169-4175.
[12]左炳然, 錢文瀚. 基于形封閉定量分析的最優抓取[J]. 上海交通大學學報, 1997, 31(12): 90-94.
ZUO Bingran, QIAN Wenhan. The optimal grasp based on quantitative analysis of form-closure[J].Journal of Shanhai Jiaotong University, 1997, 31(12): 90-94.
[13]秦志強, 趙錫芳, 李澤湘. 機器人多指爬取的力封閉判別[J]. 上海交通大學學報, 1999, 33(7): 858-861.
QIN Zhiqiang, ZHAO Xifang, LI Zexiang. On the force closure of robotic multifingered grasp[J].Journal of Shanhai Jiaotong University, 1999, 33(7): 858-861.
[14]樊紹巍, 劉伊威, 金明河,等. HIT/DLR Hand類人形五指靈巧手機構的研究[J]. 哈爾濱工程大學學報, 2009, 30(2): 171-177.
FAN Shaowei, LIU Yiwei, JIN Minghe,et al. Research on the mechanics of the HIT/DLR Ⅱ:hand anthropomorphic five-finger dexterous hand[J]. Journal of Harbin Engineering University, 2009, 30(2): 171-177.
[15]CIPRIANI C, CONTROZZI M, CARROZZA M C. Progress towards the development of the smart hand transradial prosthesis[C]//IEEE 11th International Conference on Rehabilitation Robotics. Kyoto, Japan, 2009: 682-687.
[16]熊有倫. 點接觸約束理論與機器人抓取的定性分析[J].中國科學, 1994, 24(8): 874-883.
XIONG Youlun. The point contact constraints theory and the qualitative analysis of robot grasping[J]. Science in China, 1994, 24(8): 874-883.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
