汽車ABS 控制器性能測試系統設計
2014-09-19 08:37:28王巖左付山羊玢吳志敏孫寧
機械制造與自動化 2014年6期
王巖,左付山,羊玢,吳志敏,孫寧
(南京林業大學汽車與交通工程學院,江蘇南京210037)
0 引言
汽車防抱死制動系統是汽車主動安全的重要組成部分,目前已經逐漸成為汽車的標配產品。汽車ABS性能的優劣直接影響汽車的行駛安全。現有的國家標準僅是針對應用已開發成熟的ABS整車制動試驗[1],而對處于開發階段的ABS產品并無測試,本文設計的ABS控制器性能測試系統可以對汽車ABS控制單元進行硬件在環測試,分析該系統工作過程和工作方式,發現該系統存在的問題,提出優化的措施,發現故障形成方式,為產品開發提供改進依據,降低試驗成本,縮短開發周期。在汽車ABS控制器性能測試系統的開發設計中,采用硬件在環仿真技術,該系統包括車輛仿真、硬件設計和軟件設計三個模塊。
1 仿真模型的建立
1.1 車輛模型
忽略車身側傾的影響,將懸掛質量和非懸掛質量合為車輛整車質量,忽略輪胎的滾動阻力、車輛的空氣阻力,汽車進行直線行駛,不存在輪胎橫向力的作用。考慮車輛縱向運動(x方向)、橫向運動(y方向)和橫擺運動(繞z軸的轉動),設車輛坐標系的原點在整車質心處,可以建立一個的四輪車輛模型。
根據汽車理論知識[2],列出車輛制動時的運動方程,建立數學模型,在Matlab/simulink環境下建立車輛模型,仿真得出曲線符合實際制動情況,模型建立正確。
1.2 輪胎模型
輪胎的力學特性對汽車的操縱穩定性、舒適性、動力性和制動安全性起著極其重要的作用。車輛性能的定量分析與研究及先進的底盤控制系統的設計開發,在很大程度上依賴于車輛動力學模型和輪胎動力學模型的研究[3]。根據本文的研究特性,采用了Magic Formula模型(魔術公式模型)[4]。
Y=y+SV
y=Dsin{Carctan[Bx-E(Bx-arctanBx)]}x=X+Sh
式中:D—峰值因子,表述曲線的最大值;B—剛度因子;E—曲線曲率因子,表示曲線最大值附近的形狀;C—曲線形狀因子,即表示曲線是象征橫向力、縱向力還是回正力矩;Sh—曲線的水平方向漂移;SV—曲線的垂直方向漂移。
2 ABS硬件在環系統硬件設計
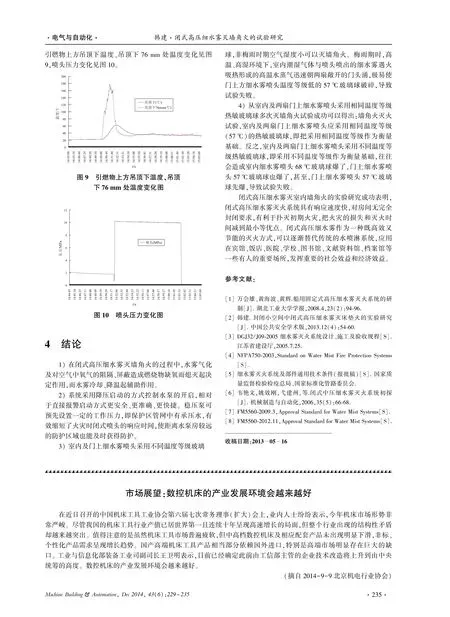
整個混合仿真系統的硬件部分由5個模塊組成:1)仿真計算機系統:用以運行仿真軟件,其機箱內中泰研創的USB7322板卡用以采集電磁閥信號及輸出階梯輪速信號;2)接口箱:電磁閥信號調理電路板將電磁閥動作時的電壓信號轉變為TTL電平信號;3)VF變換盒:VF變換電路板將階梯輪速信號轉變為方波信號;4)ABS信號轉接盒:ABS信號轉接盒將ABS控制器的接口引到機柜面板;5)ABS控制器:桑塔納2000Gsi的美國ITT公司MK20—I系[5]。
系統的結構原理圖如圖1所示。實物連接和關系如圖2所示。
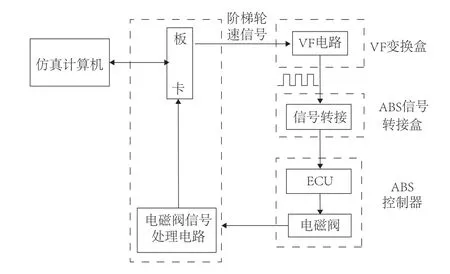
圖1 ABS混合仿真臺硬件結構原理圖

圖2 ABS混合仿真臺硬件連接及圖
3 ABS硬件在環系統軟件設計
本系統的軟件開發選擇了NI公司的LabVIEW開發平臺。根據系統要求,軟件設計包括輪速信號模擬模塊、輪速信號輸出模塊、數據存儲模塊、數據分析模塊等四個部分。軟件系統的設計功能包括設定不同的路面條件來進行仿真試驗,通過改變車輛數學模型的幾何參數實現不同車輛的制動過程仿真,并且在制動過程中,數據采集卡能及時處理壓力傳感器信號和電磁閥狀態信號。系統軟件設計流程圖如圖3所示。
4 HILS ABS試驗臺的應用
通過仿真得到輸入信號,通過Matlab與LabVIEW接口,然后經LabVIEW顯示圖像,仿真系統的輸入端已經成功運行。向ABS控制器發送相應的信號,ABS控制器內電磁閥在一定的工況下有對應的工作狀態,通過采集卡得到輸出信號,經LabVIEW導出圖像,這說明ABS硬件在環系統可行。圖4是HILS部分仿真曲線。其中包括電磁閥信號、不同附著系數路面上制動車速與輪速變化曲線和滑移率曲線圖。HIL仿真系統的應用過程說明系統開發是成功的。
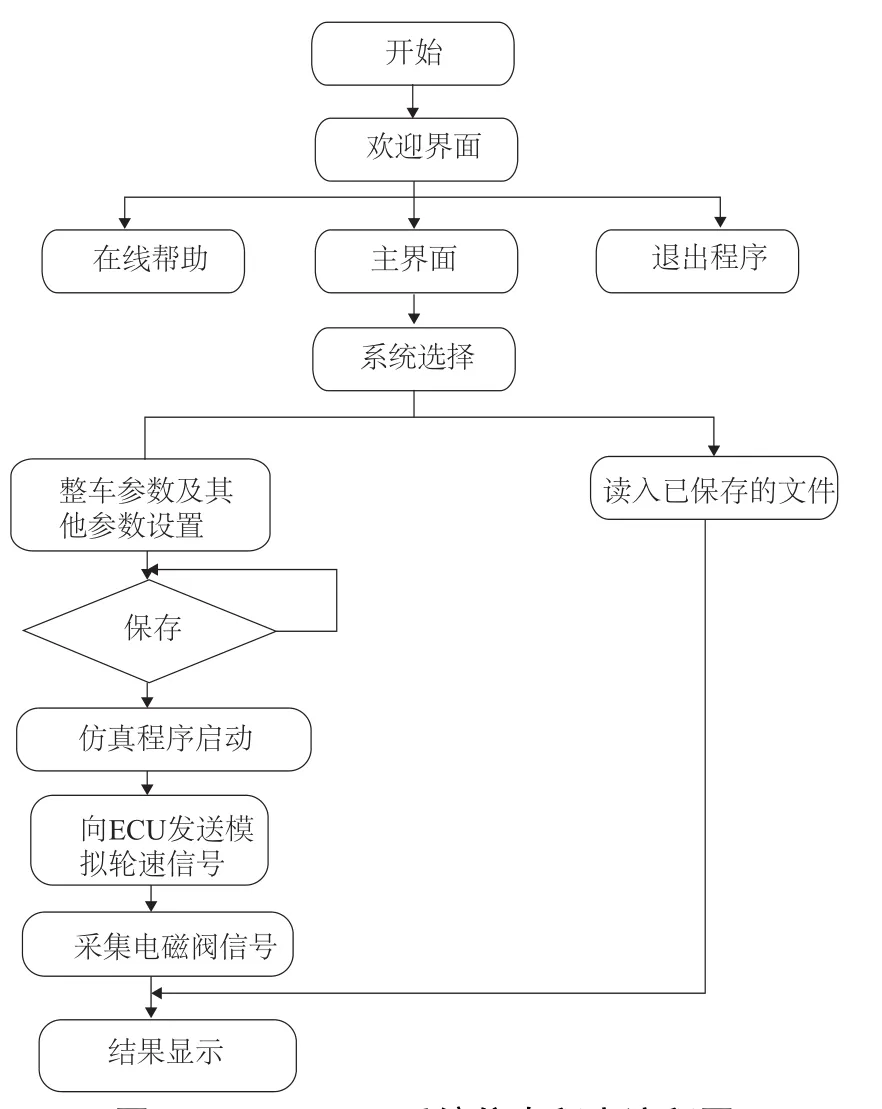
圖3 ABS HILS系統仿真程序流程圖
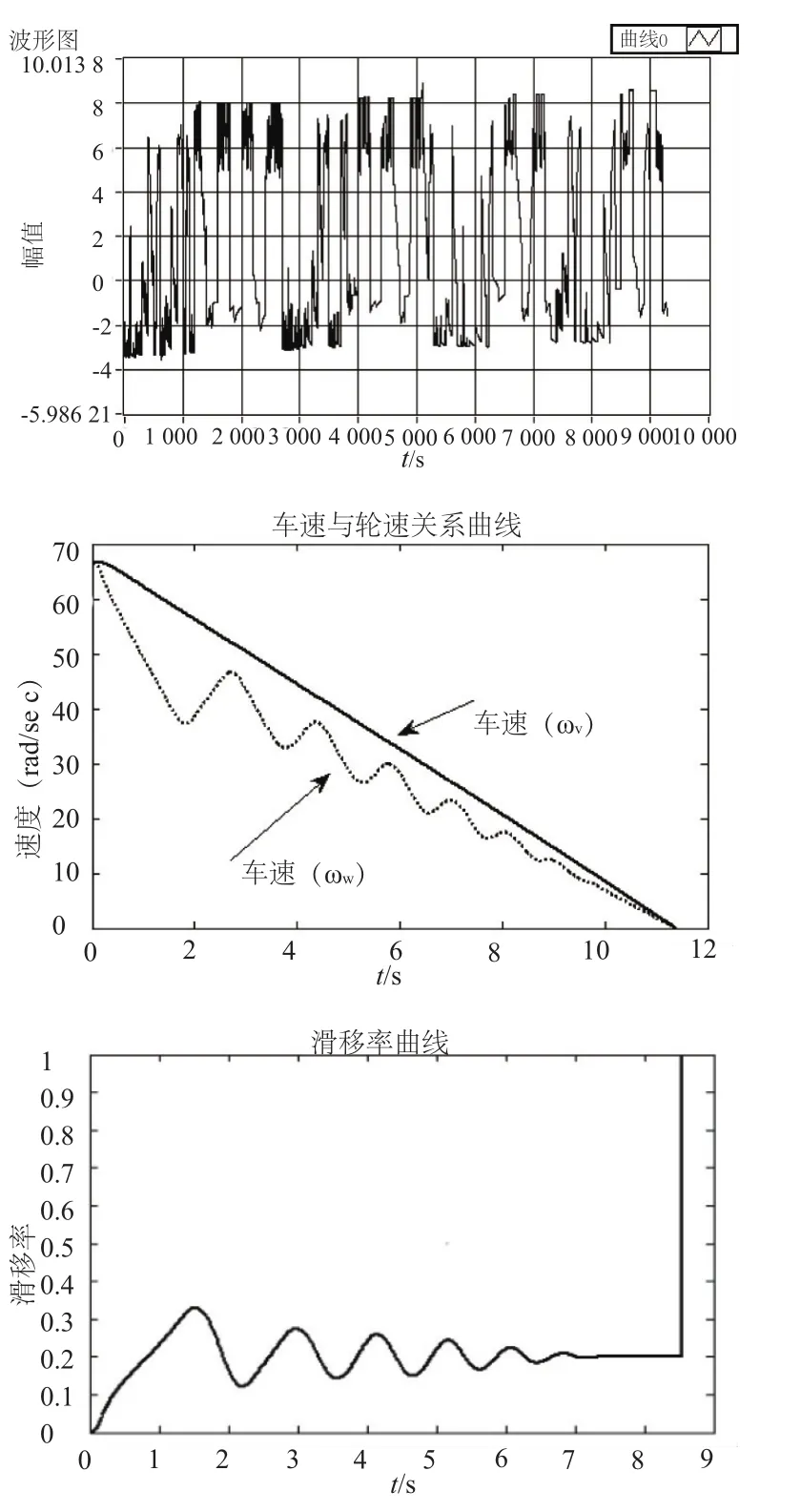
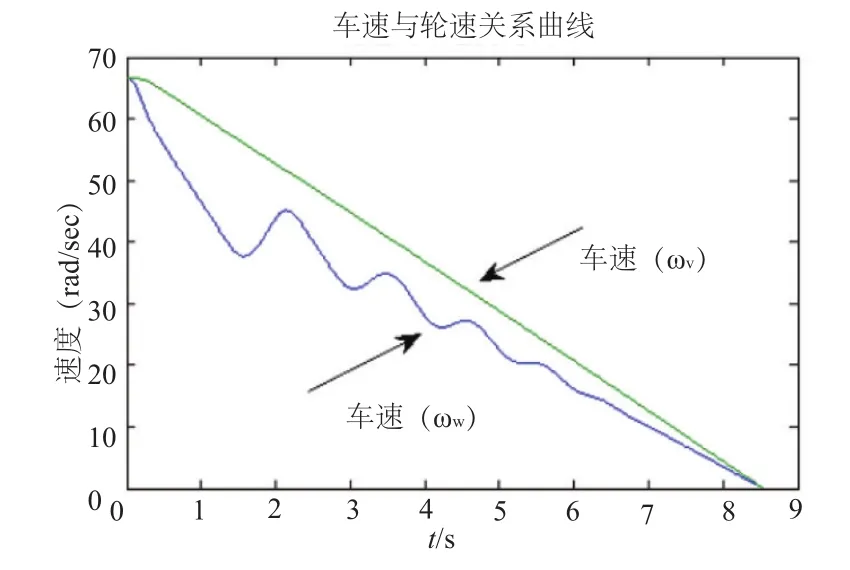
圖4 ABS HILS部分仿真曲線
5 結語
制動控制器作為車輛的主動安全核心部件,具有系統硬件和軟件復雜,對測試環境和道路條件要求高,開發周期長等特點,通過硬件在環仿真方法,可以提高試驗的安全性和可靠性,縮短開發周期,降低成本。隨著軟件技術和硬件技術的迅速發展,HIL仿真技術成為汽車控制系統開發和應用研究的重要技術,在系統中加入了真實的硬件,減少了純數字模型仿真的模擬誤差,其結果更接近實際情況。
[1]中華人民共和國國家標準:GB-T13594-2003機動車和掛車防抱制動性能和試驗方法.2003.
[2]余志生.汽車理論[M].北京:機械工業出版社,2009.
[3]劉波.基于自適應滑膜控制方法的車輛防抱死制動系統的研究.[D].長沙:國防科技大學.2006.
[4]任光勝.用Magic Formula對輪胎特性曲線的擬合與優化[J].重慶大學學報(自然科學版),2001,3.
[5]施云翔.液壓ABS仿真試驗臺的開發[D].北京:清華大學,2004.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25