基于“當前”速度的月球車動態定位方法研究*
2014-09-20 08:05:02魏二虎殷志祥
大地測量與地球動力學 2014年3期
關鍵詞:卡爾曼濾波
魏二虎 殷志祥
1)武漢大學測繪學院,武漢 430079
2)武漢大學地球空間環境與大地測量教育部重點實驗室,武漢 430079
基于“當前”速度的月球車動態定位方法研究*
魏二虎1,2)殷志祥1)
1)武漢大學測繪學院,武漢 430079
2)武漢大學地球空間環境與大地測量教育部重點實驗室,武漢 430079
推導了基于“當前”速度和卡爾曼濾波的月球車定位模型,并根據當前中國VLBI觀測網對同波束VLBI(SBI)數據進行模擬與解算。模擬實驗結果表明,該方法能得到高精度的月球車位置與速度信息,是解決月球車動態定位問題的一種有效方法。
月球車;動態定位;“當前”速度;卡爾曼濾波;VLBI觀測網
2013 -12 -14 “嫦娥三號”成功實施軟著陸,圓滿完成“落月”任務。此階段,月球車將進行月面巡視,開展月表地形地貌與地質構造、礦物組成和化學成分等探測活動,對月球探測器的位置信息提出了更高精度的要求。20世紀60年代發展起來的VLBI技術對深空量級的遠距離目標探測具有極大的優勢[1-8],其基本觀測量是時間延遲和時間延遲率,差分VLBI(ΔVLBI)的觀測量則是時間延遲之差。以往的ΔVLBI技術常常由于不一定找得到射電源而無法正常使用。SBI(same beam interferometry)作為ΔVLBI的一種衍生技術,通過對著陸器和月球車進行交替觀測,消除其共同的非幾何時延的影響,可以得到精確的月球車發射的無線電波到觀測站的幾何時延,由此對月球車進行精確定位。
由于卡爾曼濾波是一種根據觀測量通過算法估計出所需信號的一種濾波方法,且不用存儲大量的觀測數據。當得到新的觀測值時,可隨時得到新的濾波值,實時性好[9-11],符合月球車測控實時性和精度要求高的特點,可以滿足月球車動態定位的要求。利用卡爾曼濾波結合SBI進行月球車實時導航時,如何建立合理的狀態轉移矩陣十分關鍵。本文在以前學者[1-3]研究的基礎上提出基于“當前”速度[12]建立月球車的狀態轉移矩陣,在此基礎之上推導月球車動態定位的卡爾曼濾波模型,并用模擬數據進行相應的解算與分析。
1 解算模型推導
1.1 SBI基本原理[2]
SBI測定月球車與著陸器相對位置的原理[6-8]如圖1所示,其觀測量為月球車與著陸器信號到達地面兩測站的時延之差,其表達式為:

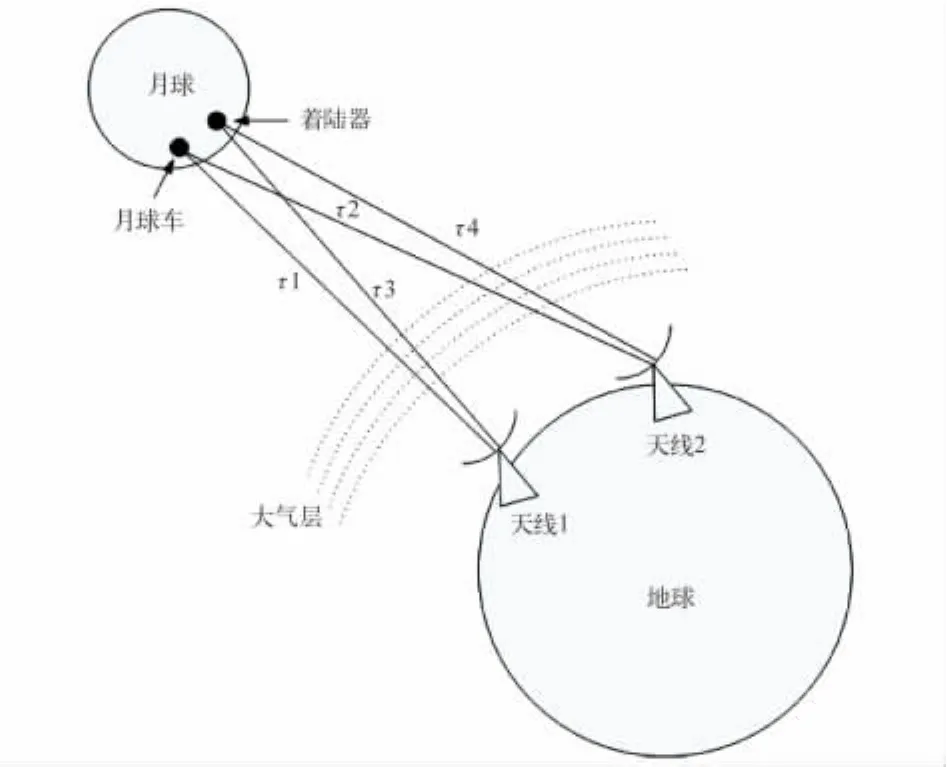
圖1月球車相對定位原理Fig.1 Principle of relative positionning of lunar vehicle
式中,τ1、τ2為月球車到天線 1、2 的時間,τ3、τ4為著陸器到天線1、2的時間,τ(t)為時延之差。雖然SBI可以消除部分非幾何延遲,但在實際觀測中還是不可避免地包含一些誤差,實際的觀測量τ為:

τ'為觀測月球車和著陸器時各自誤差抵消后的公共非幾何時延。
1.2 基于“當前”速度的狀態方程的建立
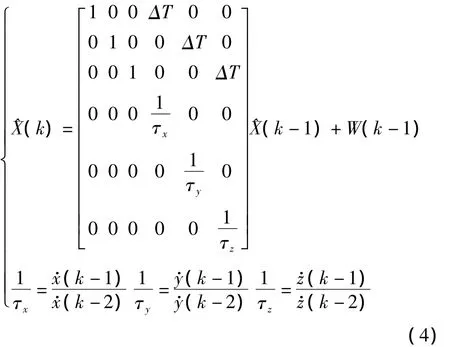
由于月球車不涉及復雜的動力學模型,所以采用基于“當前”速度[12]建立月球車的狀態方程,其基本思想是:在相鄰采樣周期內,月球車的速度趨于平穩,因此可以采用“當前”速度預估下一時刻的速度。設定k時刻系統的狀態向量為:

式中,xm(k)、ym(k)、zm(k)分別是月球車在月心月固坐標系中的三維位置,相應的x·m(k)、y·m(k)、z·m(k)分別為月球車在月心月固坐標系中的三維速度。
采用“當前”速度建立的狀態方程為:
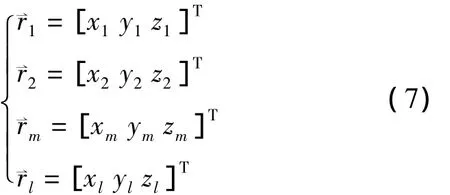
1.3 觀測方程的建立

其中,下標m和l分別表示月球車和著陸器。實測情況下,觀測時延還要受到鐘差、儀器延遲誤差、對流層、電離層延遲誤差以及隨機誤差的影響。假設上述非幾何時延的綜合為Δerror,則式(5)可寫為:

為簡明起見,略去式(5)中的時間引數。對于測站1、2、月球車和著陸器,設于是式(5)表示為:

將式(8)線性化,可得k時刻的觀測方程:
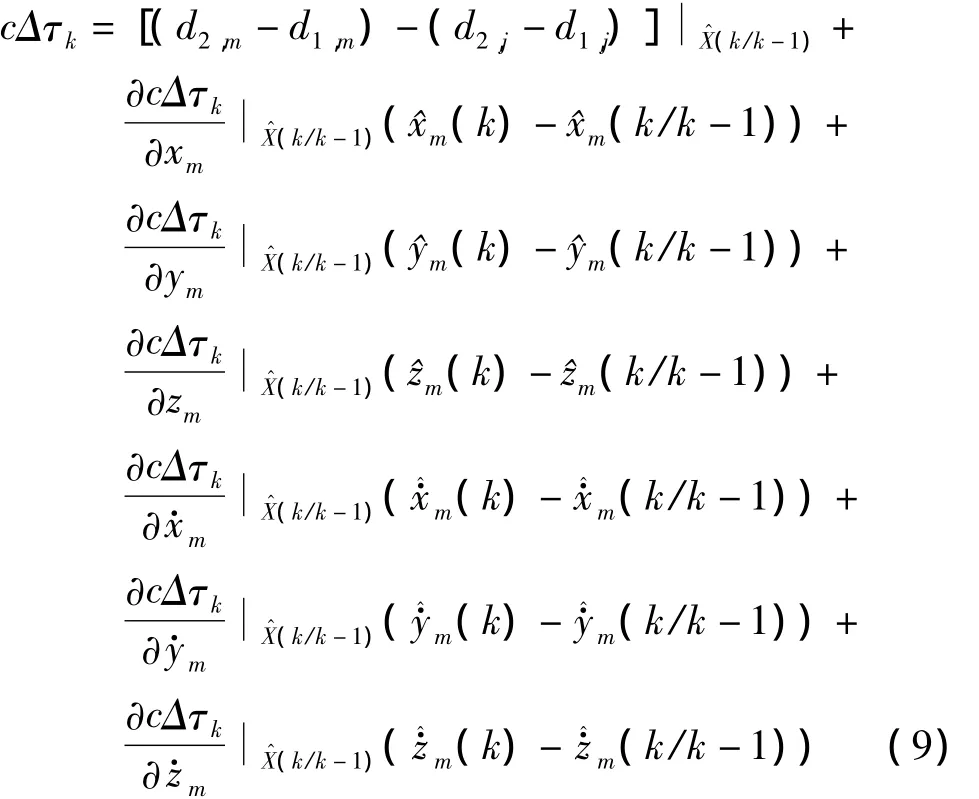
由此建立觀測方程為

式中,V(k)為零均值噪聲,即
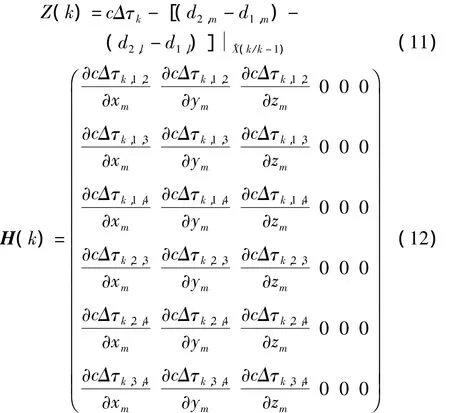
式中,Δτk,i,j表示 k 時刻 i、j測站之間的時延觀測值。
1.4 卡爾曼濾波模型
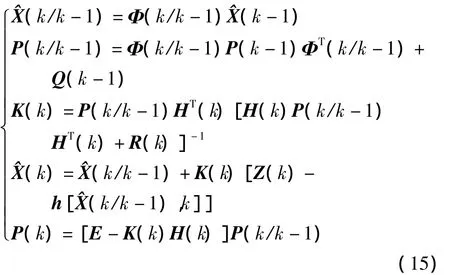
由式(4)與式(10)組成月球車動態定位的卡爾曼濾波模型:

式中,X(k)為k時刻的狀態向量,具體表達式見式(3);A為狀態轉移矩陣,即式(12)中的 H(k);Z(k)即觀測向量,具體表達式如式(11);V(k)為零均值觀測噪聲;dx為狀態向量改正數;W(k)和v(k)均為零均值白噪聲系列,其統計特性為:
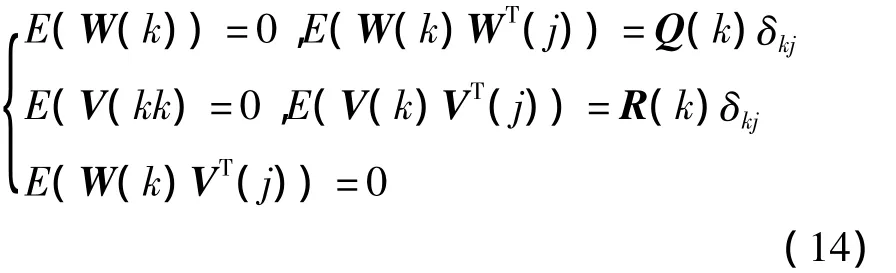
式中,Q(k)為動態噪聲方差陣,R(k)為觀測噪聲方差陣,δkj為克羅內克函數。在k時刻,濾波遞推公式為:
2 模擬解算結果分析
為簡化起見,假設著陸器在2008-08-08 20:20:30著陸在月球上位于月固坐標系X軸與月球的交點處,此時著陸器與月球車的位置矢量為m=l=[1 738.0 0.0 0.0],單位為km,并立即釋放出月球車。月球車沿著月球赤道以3 cm/s的線速度運動,連續運行1 h,采樣頻率為4 s。所用測站為中國VLBI觀測網的4個測站:上海(SH)、北京(BJ)、昆明(KM)、烏魯木齊(UR)[13],它們在起始時刻的ITRF2000坐標如表1。經過實驗,系統噪聲方差Q(k)和觀測噪聲方差R(k)取式(16)所示的值時最為理想。其中,σvlbi為時延觀測值的精度,c為光速。
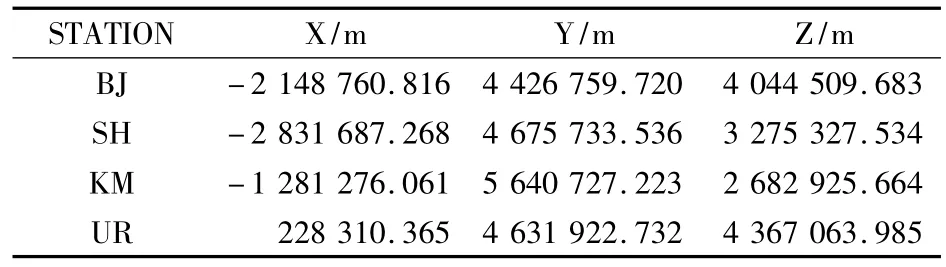
表1 VLBI測站ITRF2000坐標Tab.1 ITRF2000 coordinates of VLBI stations
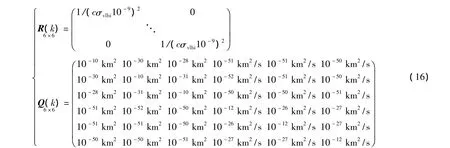
表2、3統計了在觀測值中分別加入1、10與100 ps誤差時月球車x、y、z方向位置與速度的最大誤差、平均誤差與均方根(RMS)誤差。從表2~3可以看出,時延測量精度對定位結果有較大的影響,觀測值的精度越高,定位結果越理想,因此改善觀測值的精度對月球車的定位十分關鍵。另外從結果可知,月球車x方向的位置與速度誤差比y、z方向大,這成為影響月球車定位精度進一步提高的重要因素,也是對SBI技術徑向約束差的反映。表4、5統計了在著陸器和月球車的初始真值坐標各方向分量中分別施加 1、5、10 km 偏差時,月球車 x、y、z方向位置與速度的最大誤差、平均誤差與均方根(RMS)誤差。從表4、5可以看到,隨著初始定位精度的提高,定位結果也會有所加強,但km量級的初始定位誤差的改變對定位結果的影響不是非常明顯。
3 結語
基于“當前”速度和SBI技術,推導了月球車動態定位的卡爾曼濾波模型,并通過模擬數據分析了
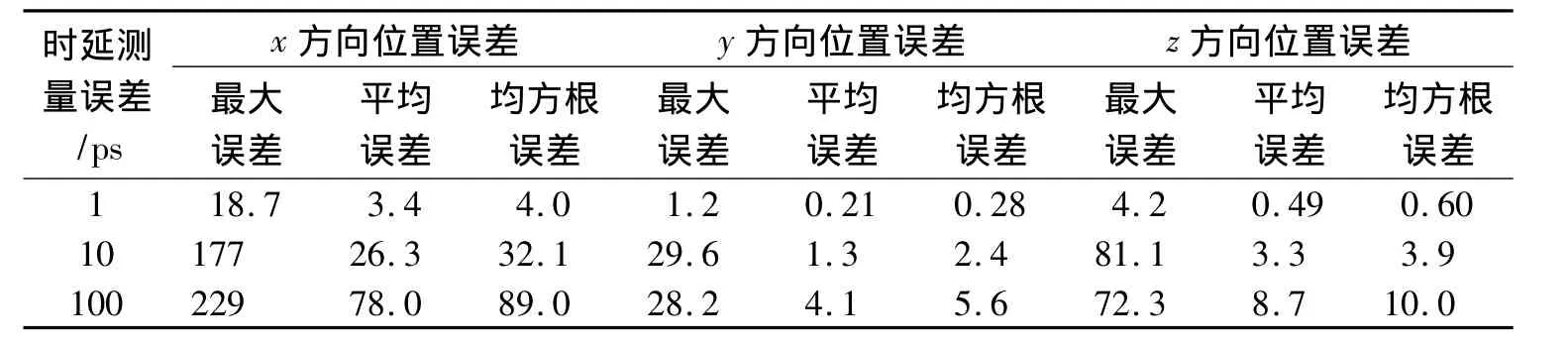
表2 不同時延精度時月球車位置誤差統計(單位:m)Tab.2 Position errors of lunar vehicle on different time-delay precision(unit:m)
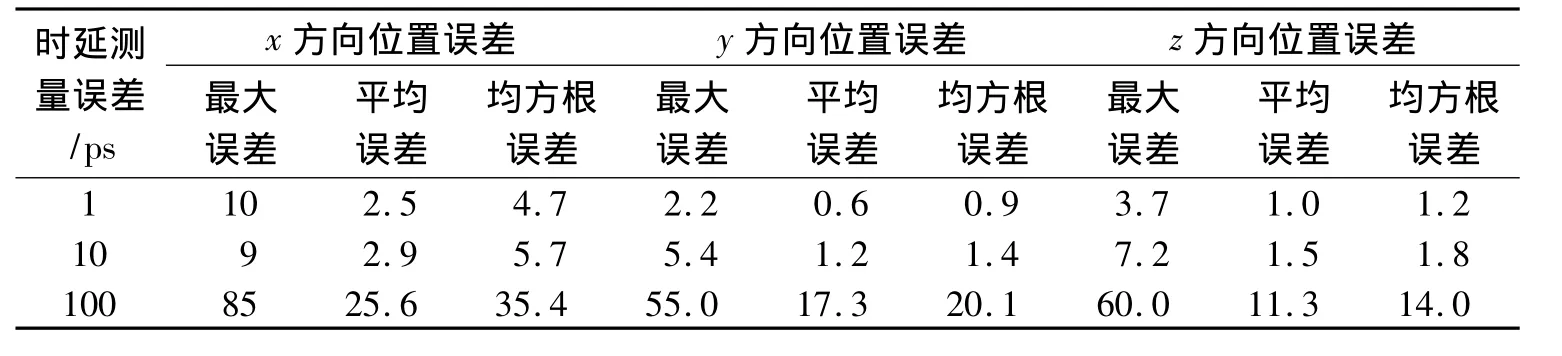
表3 不同時延精度時月球車速度誤差統計(單位:mm/s)Tab.3 velocity errors of lunar vehicle on different time-delay precision(unit:mm/s)
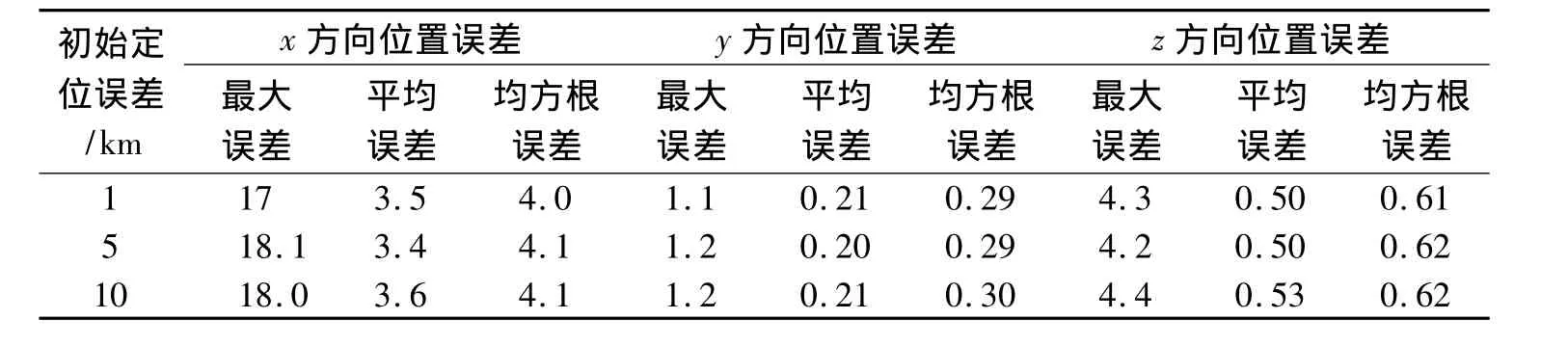
表4 不同初始定位誤差時月球車位置誤差統計(單位:m)Tab.4 position errors of lunar vehicle on different initial position precision(unit:m)
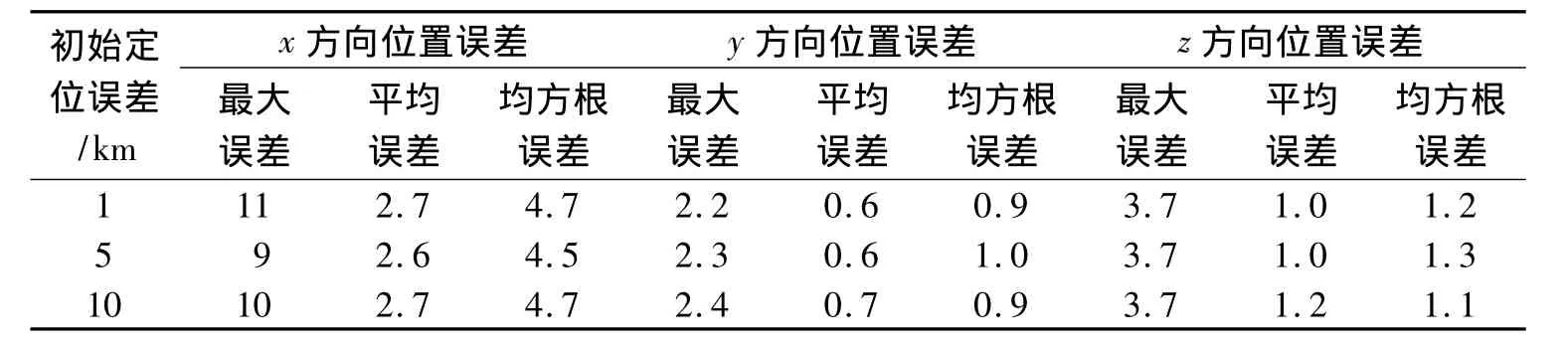
表5 不同初始定位誤差時月球車速度誤差統計(單位:mm/s)Tab.5 velocity errors of lunar vehicle on different initial position precision(unit:mm/s)
不同觀測值精度和不同初值偏差對月球車動態定位精度的影響。通過仿真結果可以看出:
1)基于“當前”速度模型可以得到高精度的速度與位置值;
2)時延觀測值的精度對定位結果有很大影響,因此,改善觀測值精度是保證高精度定位結果的關鍵;
3)月球車和著陸器一定范圍內的初始位置偏差(本文的條件為10 km)對定位結果的影響不大,此時可以忽略初始位置偏差的影響。
1 喬書波,李金嶺,孫付平.VLBI在探月衛星定位中的應用分析[J].測繪學報,2007,36(3):262 -268.(Qiao Shubo,Li Jinling,Sun Fuping.Application analysis of lunar exploration satellite positioning by VLBI technique[J].Acta Geodaetica et Cartographica Sinica,2007,36(3):262 -268)
2 Wei Erhu,et al.Simulation and results on real-time positioning of Chang’e-3 rover with the same-beam VLBI observations[J].Planetary and Space Science,2013,84:20 -27.
3 Wei Erhu,et al.Improvement of Earth orientation parameters estimate with Chang’e-1 ΔVLBI observations[J].Journal of Geodynamics,2013,72:46 -52.
4 魏二虎.我國空間VLBI系統的有關設計和模擬計算研究[D].武漢:武漢大學,2006.(Wei Erhu.Research on the designment of Chinese space VLBI system and computation simulation[D].Wuhan:Wuhan University,2006)
5 鄭勇.VLBI大地測量[M].北京:解放軍出版社,1999.(Zheng Yong.Geodesy on VLBI[M].Beijing:PLA Publishing House,1999)
6 葉叔華,錢志瀚.VLBI:深空探測的重要手段[N].科學時報,2007 -12 -10.(Ye Shuhua,Qian Zhihan.VLBI:An improtant method of deep space exploration[N].Science Times,2007 -12 -10)
7 魏二虎,易慧,劉經南.月球探測器差分VLBI測量的模型及可估計參數研究[J].測繪通報,2011(1):1-4.(Wei Erhu,Yi Hui,Liu Jingnan.On tht differential VLBI model and estimable parameters with Lunar probe[J].Bulletin of Surveying and Mapping,2011(1):1 -4)
8 洪曉瑜.VLBI技術的發展和“嫦娥工程”中的應用[J].自然雜志,2007,29(5):297 - 299.(Hong Xiaoyu.VLBI techniques and application in the Chang’e Lunar orbiter[J].Chinese Journal of Nature,2007,29(5):297 -299)
9 Zhou Z,Shen Y,Li B.A windowing-recursive approach for GPS real-time kinematic positioning[J].GPS Solutions,2010,14(4):365 -373.
10 Moore M,Wang J.An extended dynamic model for kinematic positioning[J].The Journal of Navigation,2003,56(1):79-88.
11 Helferty J P.Improved tracking of maneuvering targets:The use of turn-rate distributions for acceleration modeling[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1 355 -1 361.
12 萬德鈞,房建成,王慶.GPS動態濾波理論、方法及其應用[M].南京:江蘇科學技術出版社,2000.(Wan Dejun,Fang Jiancheng,Wang Qing.Theory,method and application of GPS dynamic filter[M].Nanjing:Jiangsu Science and Technology Press,2000)
13 The International Terrestrial Reference Frame[EB/OL].http://itrf.ensg.ign.fr/.
ON LUNAR VEHICLE’S KINEMATIC POSITIONING BASED ON CURRENT VELOCITY
Wei Erhu1,2)and Yin Zhixiang1)
1)School of Geodesy and Geomatics,Wuhan University,Wuhan 430079
2)Key Laboratory of Geospace Environment and Geodesy,Ministry of Education,Wuhan University,Wuhan430079
Lunar vehicle’s kinematic positioning is the base of lunar exploration,so prediction of Lunar vehicle’s velocity is very important.A model for Lunar vehicle’s kinematic positioning based on“current”velocity and kalman filter is presented in the paper.The experimental results of simulation and tests with the data from China VLBI Net show that high precision position and velocity of lunar vehicle can be got by this method and it is an effective method to solve Lunar vehicle’s kinematic positioning.
lunar vehicle;kinematic positioning;“current”velocity;Kalman filter;VLBI net
P228.5
A
1671-5942(2014)03-0059-04
2014-01-20
國家自然科學基金項目(41374012);武漢大學測繪學院2012年本科專業綜合改革教學研究項目(201220);國家863計劃項目(2008AA12Z308)。
魏二虎,博士,教授,博導,主要從事空間大地測量和地球動力學研究。E-mail:ehwei@sgg.whu.edu.cn。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36