基于錨固站的導航星座分布式自主定軌研究*
2014-09-20 08:05:18蘇天祥文援蘭藍柏強
大地測量與地球動力學 2014年3期
蘇天祥 文援蘭 藍柏強 夏 煒 劉 毅
1)61892部隊,汕頭 515071
2)國防科學技術大學航天與材料科學學院,長沙 410072
基于錨固站的導航星座分布式自主定軌研究*
蘇天祥1)文援蘭2)藍柏強1)夏 煒1)劉 毅1)
1)61892部隊,汕頭 515071
2)國防科學技術大學航天與材料科學學院,長沙 410072
為解決導航衛星星上分布式自主定軌問題,研究了擴大方差擴展卡爾曼濾波。結果表明,基于地面錨固站和擴大方差擴展卡爾曼濾波算法,導航衛星能夠實現分布式自主定軌,并且滿足對導航衛星軌道的精度要求。關鍵詞 錨固站;可觀性;分布式;主定軌;URE
為了使導航衛星在失去地面支持的情況下維持系統的導航功能,發展導航星座的自主定軌技術顯得越來越重要[1-2]。為解決導航衛星自主定軌問題,國內外學者開展了星座自主定軌研究[3-8]。本文將在前人研究基礎上,考慮錨固站維持坐標誤差和時間維持精度對衛星定軌的影響,給出等效測距誤差URE(user range error)的大小。
錨固站是指具有無線電發射能力的地面基站,可將其看作偽衛星,參與星間鏈路的測距。星間測距采用時分多址(TDMA)的擴頻通信技術,每顆衛星分配1.5 s,衛星在1.5 s內采用超高頻(UHF)雙載波頻率播發測距碼信號,其余則處于信號接收狀態。對于具有30顆衛星的導航星座來說,在45 s內就可以完成星座衛星播發測距信號的遍歷,稱之為測距幀。下一個45 s周期用作星間數據通信,即完成星座衛星播發數據信號的遍歷,稱之為數據幀。這樣,在星座內相互可見的2顆衛星之間就實現了雙向偽距測量和數據交換。星間數據交換的內容主要包括星間測量偽距、衛星星歷與時鐘參數、誤差協方差陣數據以及衛星完好性監測參數等[9-11]。
1 星座可觀性分析
1.1 僅星間測量星座旋轉不可觀分析

由式(1)可知,同軌道面兩顆衛星Ωi=Ωj,無法對Ω進行修正;異軌道面的兩顆衛星,若兩軌道面同時旋轉ΔΩ,星間測距也將無法對Ω進行修正。
1.2 基于錨技術的星座旋轉可觀性分析

由式(2)可知,對于錨固站來說,可以修正它與可見衛星的Ω,合理布局錨固站將可對所有衛星的Ω進行修正。由此可見,通過引進錨技術可以有效地解決星座旋轉不可觀問題[12]。
2 濾波模型
2.1 狀態方程
假設衛星在初始t0時刻的位置和速度分別為r0、˙r0,在觀測時刻 tk的位置和速度分別為 r、˙r,則衛星位置和速度分別是 r0、的函數,即

設在tk時刻對衛星的觀測量為Yk,觀測誤差為vk,即

設衛星單位質量所受作用力為f,時刻t衛星的運動方程為:
4.2.3 為了實現城市土地利用結構優化效益最大化的目的,在保障城市居民生活對用地的基本需求量同時,還要著重于滿足城市產業結構升級和規模經濟發展的用地需求。鑒于SD模型的三種情景在用地總面積特別是建設用地面積年均增幅上明顯低于SD-MOP模型預測結果,而城市規模的擴展對于經濟活動和生態維護均能夠預留較為充足用地空間。因此,宜于選擇基于SD-MOP模型的城市用地總體規模增速介于基準利用情景和粗放利用情景、年均面積占比最大建設用地為商服用地的集約利用情景優化仿真方案作為最佳解決方案。
2.2 濾波方程
設 tk-1時刻 x 的估計值為,協方差為,在tk時刻x的預報值為,預報值誤差方程為:

假設觀測誤差vk服從正態分布,預報值的誤差Vˉxk也服從正態分布,并且觀測值與預報值不相關,它們的統計特性為:
式中σi為觀測值均方差,Rk為觀測值協方差矩陣。
設損失函數為J,根據最小二乘構造目標函數并滿足[13]

對式(9)求極值,得參數的估值^xk和協方差矩陣的估值 ^Pk為:

由矩陣反演公式可得:


2.3 基于星間觀測的擴大方差擴展卡爾曼濾波方程
由于星間測距設備的精度并非像其標稱值那樣精確,尤其是與其相關的衛星狀態存在一定的狀態誤差,如果直接利用觀測值的協方差矩陣R,可能造成對其修正過大,不能反映真實情況。利用觀測誤差協方差矩陣R吸收測量中與其他衛星狀態關聯的誤差,即將R直接提升一個值,稱為擴大觀測方差的EKF(AREKF)。一種方法是在R上固定地增加一個常量ΔR,但由于ΔR難以準確反映所引入的觀測誤差,因而考慮一種動態增加R的方法重新考察衛星i、j之間的星間偽距觀測值,將觀測線性化為:

在星間觀測中有Hi=-Hj,以xi作為待估的隨機參數,Hjxj+vij為相應的誤差項,則相應的觀測協方差矩陣為:
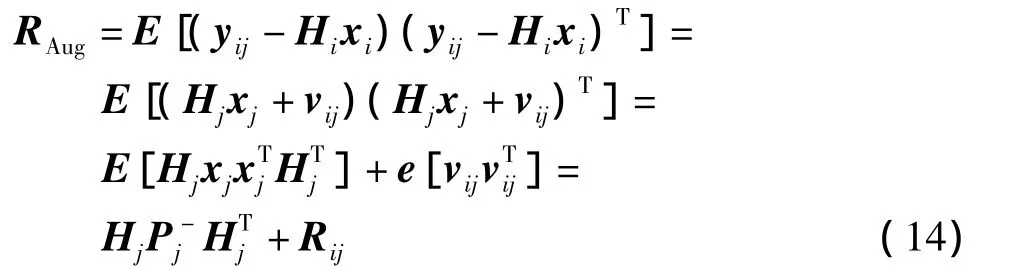
RAug是擴大后的觀測方差矩陣,Rij是星間觀測初始誤差協方差矩陣,Hj是星座中關聯的其他衛星的觀測矩陣,P-j是關聯的其他衛星的狀態協方差矩陣一步預報值。R的增加意味著觀測值并不能達到測距設備所給出的精度。
測量更新
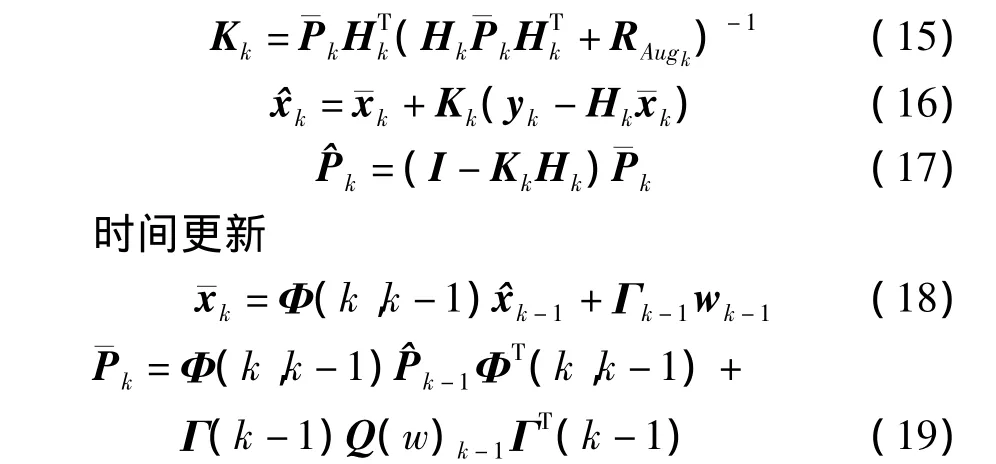
將錨固站看作固定在地面上的偽衛星,其測距模式和星座衛星測距模式一致,但擴大后的觀測方差矩陣為:

式中Ra是錨固站的坐標誤差和時間誤差影響的綜合方差。
AREKF分布式濾波是一種分布式算法,只處理與本星相關的觀測數據,而且只對本星進行軌道確定,與整網濾波相比大大減小了計算量,能適應星上計算機的計算能力;其次AREKF算法將與本星相關的其他衛星狀態誤差看作觀測誤差項處理,一方面去除了星間測量的相關性,減少了數據傳輸量,另一方面將相關衛星狀態誤差看成觀測誤差項也能避免相關衛星故障時帶來的影響,提高了濾波的可靠性。AREKF算法方差擴大的部分實質上是考慮了各種不可測誤差和對方衛星狀態誤差對濾波造成的影響,具有一定實用性。
3 仿真場景設置及結果分析
3.1 仿真場景設置
仿真過程主要包括兩部分:
1)衛星軌道仿真,產生理論軌道、錨固站距離觀測值和星間距離觀測值;
2)衛星軌道估計,產生衛星軌道的估計值,與上述理論軌道比較,分析定軌精度。
仿真場景導航星座由24顆MEO(24/3/1)、3顆GEO和3顆IGSO組成。MEO衛星半長軸為28 494 137 m,偏心率為0,軌道傾角為55°;GEO半長軸為42 164 169.637 m,軌道傾角設為0°,以升交點為起始位置,3顆星初始位置角分別設為210.46°、240.96°和270.46°;28 ~30 號為IGSO 衛星,半長軸為42 164 169.637 m,軌道傾角設為 55°,位于升交點赤經分別設為0、120°和240°的3個軌道面上。設置5個地面站,星間測距精度為1 m(1σ),星地測距精度1 m(1σ),錨固站維持精度為1 m(1σ),時鐘維持精度0.8 ns(1σ),星間測距頻度為300 s,錨固頻度為300 s,仿真周期為7 d。錨固站個數為4個,分別布置在北京、喀什、佳木斯和三亞。場景一為整網濾波算法,場景二為AREKF算法。
3.2 結果分析
圖1、2為整網濾波定軌的結果。從圖中可看出,整網濾波7 d后MEO-1衛星的定軌誤差小于6 m,URE約為2.5 m。圖3~8為 AREKF濾波定軌結果。由圖可知,AREKF 7 d后MEO-1衛星定軌誤差小于15 m,URE約為3 m;GEO-1和IGSO-1衛星定軌誤差在30 m以內,其URE均在4 m以內。圖9為星座整體URE數值,可以看出URE的均值在3m以內。雖然AREKF的定軌精度與整網定軌精度相比有所降低,但URE可以達到相當的精度,對于用戶定位的影響并不大,可以滿足定軌精度要求。
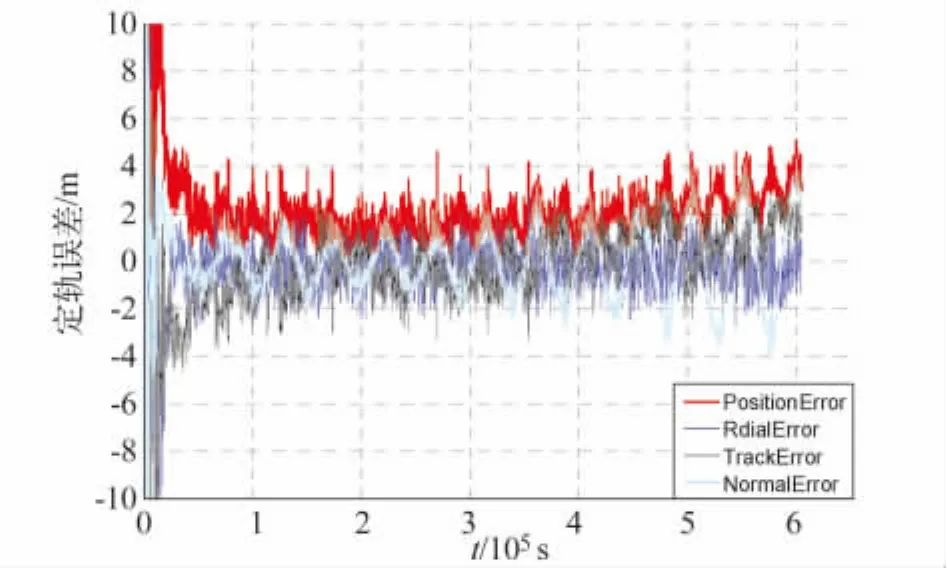
圖1 整網MEO-1定軌誤差Fig.1 The orbit errors of MEO-1 with WNEKF
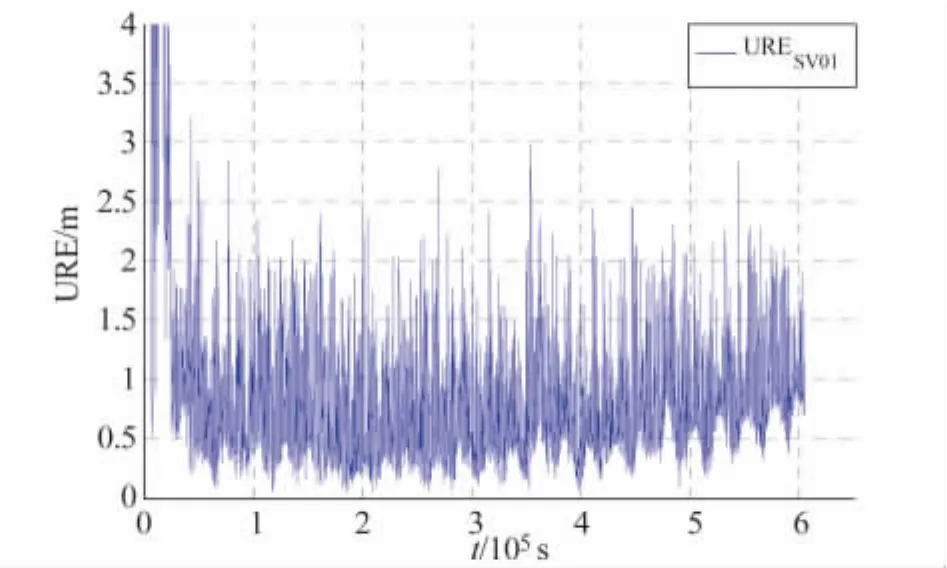
圖2 整網MEO-1UREFig.2 The URE of MEO-1 with WNEKF
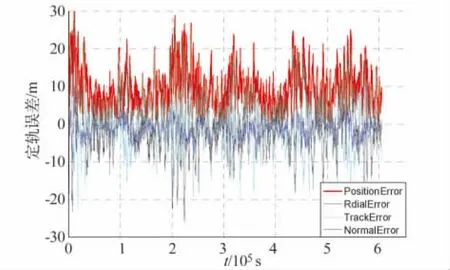
圖3 AREKF算法得到的MEO-1定軌誤差Fig.3 The orbit errors of MEO-1 with AREKF
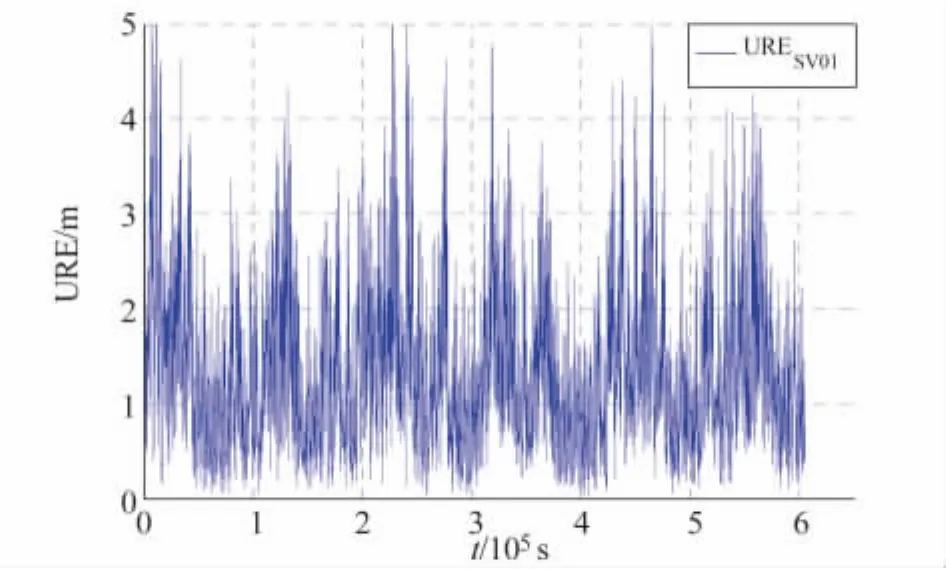
圖4 AREKF算法得到的MEO-1 UREFig.4 The URE of MEO-1 with AREKF
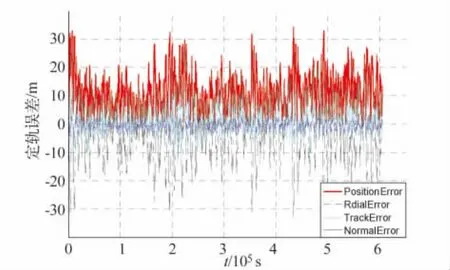
圖5 AREKF算法得到的GEO-1定軌誤差Fig.5 The orbit errors of GEO-1 with AREKF
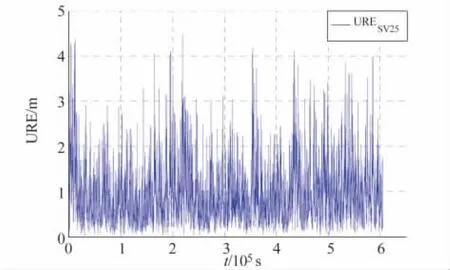
圖6 AREKF算法得到的GEO-1 UREFig.6 The URE of GEO-1 with AREKF
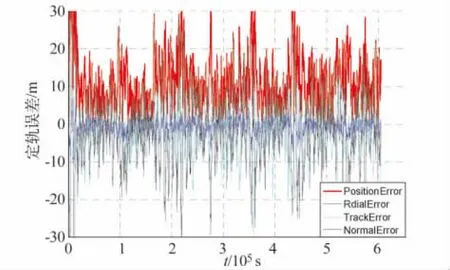
圖7 AREKF算法得到的IGSO-3定軌誤差Fig.7 The orbit errors of IGEO-1 with AREKF
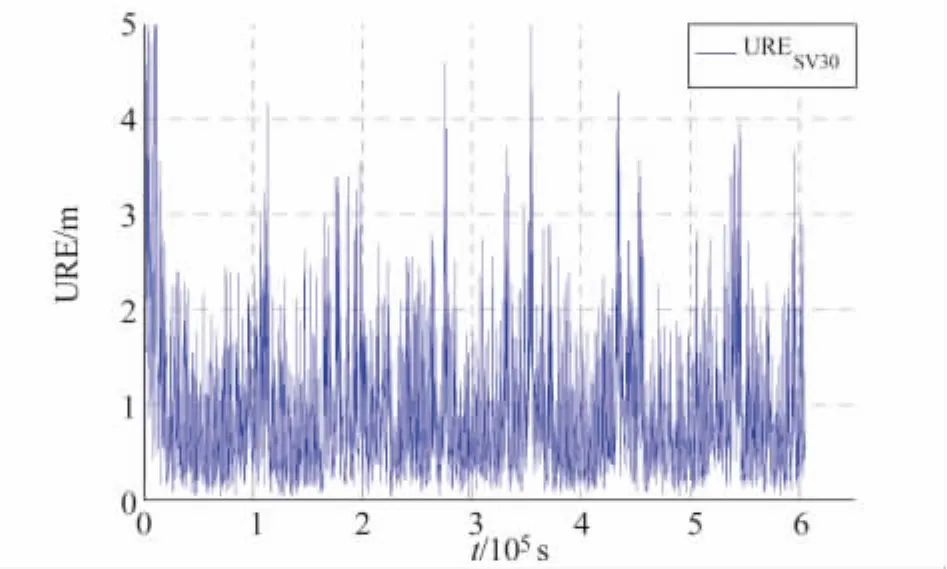
圖8 AREKF算法得到的IGSO-3 UREFig.8 The URE of IGEO-1 with AREKF
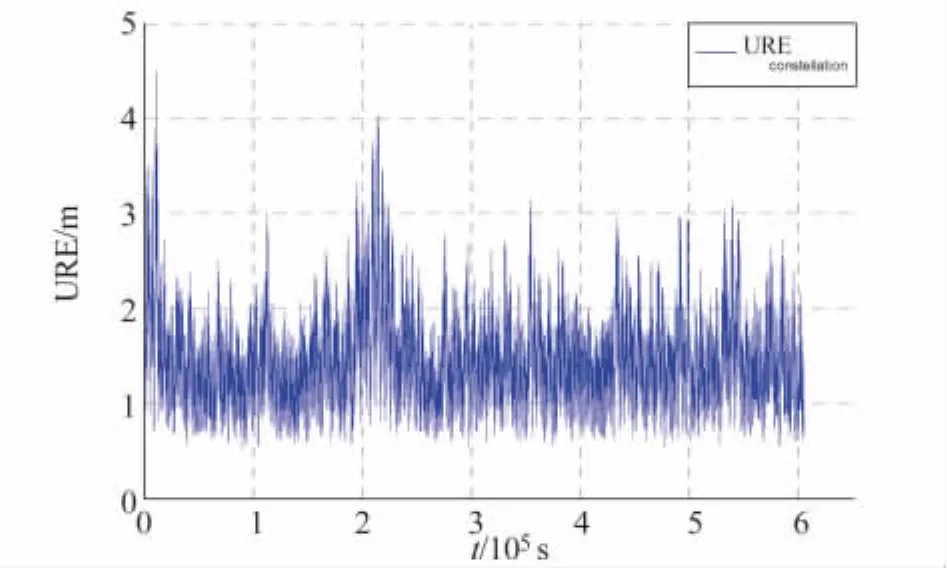
圖9 AREKF算法得到的星座UREFig.9 The URE of constellation with AREKF
4 結語
利用錨固站為導航星座自主定軌提供空間慣性基準,解決了自主定軌時秩虧的問題,研究并推導了AREKF分布式濾波算法。通過場景仿真,基于錨固站的自主導航分布式濾波URE與整網URE相當,可以較好地滿足用戶導航定位的要求,具有一定的工程參考價值。但需要指出的是,以上結論是在導航星座的星間鏈路高效可靠的理想狀態下得到的。
1 Ananda M P,el al.Autonomous navigation of the global positioning system satellite[C].AIAA Guidance and Control Conference,2003.
2 Menn M D,Berstein H.Ephemeris observability issues in the global positioning system(GPS)autonomous navigation[C].IEEE position location and navigation symposium,Las Vegas,NV,1994.
3 陳金平,等.基于星間測距/軌道定向參數約束的導航衛星自主定軌研究[J].武漢大學學報:自然科學版,2005(5):439 - 444.(Chen Jinping,el al.Autonav of navigation satellite constellation based on crosslink range and orientation parameters constraining [J].Wuhan University Journal of Natural Science Edition,2005(5):439 -444)
4 帥平,等.基于X射線脈沖星的導航衛星自主導航[J].中國空間科學技術,2008,25(2):1 -7.(Shuai Ping,el al.Autonomous navigation for navigation satellites based on X-ray pulsars[J].China Academy of Space Technology ,2008,25(2):1-7)
5 Zhu Jun,el al.Research on modeling and simulation of semiautonomous orbit determination for satellite navigation constellation[R].Asia Simulation Conference -7th International Conference on System Simulation and Scientific Computing,Beijing,2008.
6 林益明,等.基于星間鏈路的分布式導航自主定軌算法研究[J].宇航學報,2010,31(9):2 088 -2 094.(Lin Yiming,el al.Autonomous orbit determination algorithm based onA satellite cross link GNSS Distributed[J].Journal of Astronautics,2010,31(9):2 088 -2 094)
7 宋小勇.Compass導航衛星定軌研究[D].西安:長安大學,2009.(Song Xiaoyong.Study on orbit determination for Compass navigation satellites[D].Xi’an:Chang’an University,2009)
8 Ferguson,el al.Decentralized estimation algorithms for formation flying spacecraft[C].AIAA Guidance and Control Conference,2003.
9 帥平,等.導航星座自主導航技術研究[J].中國工程科學,2006,8(3):22 -30.(Shuai Ping,el al.Study on autonomous navigation techniques for navigation constellations[J].Engineering Sciences,2006,8(3):22 -30)
10 張育林,等.衛星星座理論與設計[M].北京:科學出版社,2008.(Zhang Yulin,el al.Theory and design of satellite constellations[M].Beijing:Science Press,2008)
11 蔡志武,等.導航衛星長期自主定軌的星座旋轉誤差分析與控制[J].宇航學報,2008,29(2):522 -528.(Cai Zhiwu,el al.Analysis and control of constellation rotation error in long-term autonomous orbit determination for navigation satellites[J].Journal of Astronautic 2008,29(2):522-528)
12 蘇天祥.基于錨固站的導航星座自主定軌技術研究[D].長沙:國防科技大學,2012.(Su Tianxiang.Study on autonomous orbit determination of navigation constellation based on ground-based anchor[D].Changsha:National U-niversity of Defense Technology,2012)
13 楊元喜.自適應動態導航定位[M].北京:測繪出版社,2006.(Yang Yuanxi.Adaptive navigation and dynamic positioning[M].Beijing:Surveying and Mapping Press,2006)
STUDY ON AUTONOMOUS ORBIT DETERMINATION OF NAVIGATION CONSTELLATION WITH DISTRIBUTION ALGORITHM BASED ON GROUND-BASED ANCHORS
Su Tianxiang1),Wen Yuanlan2),Lan Baiqiang1),Xia Wei1)and Liu Yi1)
1)61892 Troops of PLA,Shantou 515071
2)College of Aerospace Science and Engineering,National University of Defense Technology,Changsha410072
Navigation Constellation may drift in secular operation because it lacks the inertial benchmark only based on the measurements of inter-satellites links.Firstly,the technique of ground-based anchomethod is used to deal with the observability of the constellation in theory.Then,AREFK(Augment-R Extended Kalman Filter)algorithm is used to settle the problem of the distributed autonomous orbit determination of the navigation constellation and validated the simulation lastly.The simulation results indicate the autonomous orbit determination can satisfy the needs of accuracy of the navigation and position.
ground-based anchor;observability;distribution;autonomous orbit determination;URE
P228
A
1671-5942(2014)03-0111-05
2013-07-24
蘇天祥,男,1984年生,碩士,工程師,主要從事衛星導航定位工程研究。E-mail:tianxiang_su@163.com。