基于能控性和能觀性的基礎隔振裝置的優化配置
2014-09-20 02:57:24王玉梅
振動與沖擊 2014年17期
王玉梅
(地震工程與工程振動重點實驗室 中國地震局工程力學研究所,哈爾濱 150080)
近年來在結構振動控制方面發展了很多關于控制設備最優配置的方法。對于減隔震建筑,減隔震裝置從廣義上看,可以視為附加于原結構的被動激勵或被動控制裝置,于是其位置的最優化問題就成為控制器位置的最優化問題,最優控制就是用最小代價最大限度地把結構從一個狀態轉移到另一個預想的狀態。在現代控制學領域,最優化問題有很多土木工程領域可以借鑒的思路,比如基于能控性和能觀性概念的思路。能控性和能觀性的概念多應用于航空器控制領域和電氣自動化領域,作為自主導航和轉換機反饋機制的控制[1-2],它們描述了動態系統的輸入 u(t)對狀態 x(t)的控制能力和輸出y(t)對狀態x(t)的反應能力,恰與振動方程的狀態空間表達式對系統的描述相對應。改變控制器位置即改變了輸入的系數矩陣B,重塑了系統的動力性質,因此改變了系統的能控性。例如,如果控制器和傳感器置于某振型的節點,即使控制器和傳感器性能再優越,該位置也是既不能控也不能觀的。通過建立能控性和能觀性與振型的關系,就能建立相對振型的最優控制[3-5],其中 Hamdan and Nayfeh的辦法是在能控性和能觀性的向量空間中引進一個廣義角[5];Choi等[6]改進了該方法,延伸到平衡坐標系統,并引進特征值的范數等衡量指標。
本文介紹的方法是由 Panossian等[7]提出并由Gawronski[8]完善的方法。這個方法把每個裝備位置對特定振型的范數進行計算,然后按在系統模態參與的程度進行分級。它與LQR法的2-范數目標函數的控制目標相符。Silva等[9]采用了這個方法的H∞對他們的智能控制系統進行了控制器和傳感器的選擇。本文用既能反應能控性又能反應能觀性,而且在線性變換中保持常數的Hankel奇異范數(Hankel singular norm,Hh)作為優化指數的判據基礎。本文以基礎減隔震建筑的隔振墊的布置為例,來說明這個方法在土木工程中的應用。
1 工程實例
這里以位于洛杉磯市的一幢八層RC建筑為例,研究最優控制。這是由美國ASCE學會下的控制委員會為方便土木工程界學者比較結構控制研究成果的應用,委托 Rice大學 Nagarajaiah等[10-11]以及 Erkus等[12]于2005年以洛杉磯市政廳為原型建立的數學模型,關于減隔震控制的Benchmark問題。該建筑總高35.1 m,總重2.031×105kN。1~6層平面為 L型,為82 m×54 m,7~8層為矩形,82 m×35 m。該問題定義了三種可選基礎減隔震基礎的數學模型和隔振墊的可選位置(92個),以及該結構的質量振型等參數,底層平面圖如圖1所示,每個位置點的坐標亦已知。結構的各層質量簡化如表1所示。

圖1 底層平面圖及隔振裝置可選位置Fig.1 Base plan and available isolator locations

表1 樓層質量Tab.1 Story masses,(kN·s2·m-1)
加上基底底板和扭轉效應,每層3個自由度,該建筑共27個自由度。原結構無隔振時x-,y-,r-方向的自振周期分別為 0.78 s,0.89 s,0.66 s。
經設計計算,取隔振墊總的等效剛度和阻尼系數為:kb=2 119 kN/m,cb=241.44 kN·s/m,對應平動和轉動的隔振周期為2.28 s(x-),2.18 s(y-),及1.86 s(r-),等效阻尼比為 14.7% (x-),14.9%(y-),和17.9%(r-)[13]。設計要求,隔振剪力不應超過總結構總重量的10%。假設每個隔振墊水平承載力為1 500 kN,那么每個方向總數應不超過15個。
結構振動方程以狀態空間方程表示:

其中:q=]為狀態向量,y為輸出向量,u為控制輸入(這里為隔振控制),為地震動輸入。z=Φη,Z為上部結構相對于隔震層yb(下標b表示base)的位移。對于隔振結構,上部結構基本處于彈性狀態,可以模態坐標η表示狀態,與隔振層的常態坐標yb分開。這樣做的好處是方便能控性和能觀性的求解,但矩陣A、B、C包含相對于各層質心坐標的控制點和測量點的坐標轉換矩陣,需要經過較復雜的坐標變換求得[10-13]。結構的質量、阻尼和剛度矩陣都為已知。控制器位置的信息包含在矩陣B中。傳感器位置的信息包含在輸出矩陣Cy中。
這里的控制器視為與隔振墊并列,控制輸入即為隔振支座處的被動或主動力;傳感器則與結構的輸出并列,為反饋信號。
2 基本理論方法
能控性描述輸入和狀態的關系,涉及矩陣A和B的關系;能觀性描述輸出和狀態的關系,涉及矩陣A和的Cy關系。線性時變系統能控和能觀的判據是在時間區間[t0tf]內 Gram矩陣 grammians(Wc和 Wo)非奇異:

線性定常系統的判據是矩陣Wc和Wo為滿秩,即:

定常系統的Wc和Wo可以在Matlab中利用ctrb()和obsv()函數直接求出,從而判斷系統的能控性和能觀性。對于完全能控的線性定常系統,通過特別選定的坐標變換,可以將其狀態方程化成標準的形式,稱為能控規范形。當系統為不完全能控時,通過引入適當的坐標變換,可將它分解成能控的部分和不能控的部分。穩態系統的A,能控性和能觀性的grammians都是正定的。
線性系統的解耦,要通過坐標變換x=進行振型分解。土木工程領域較為熟知的第i振型的轉換矩陣為:

而控制領域較方便的是另一種解耦方式,即在上述轉換矩陣的基礎上乘以一個T′i,把矩陣A轉換成實部和虛部分開的形式,其中

如此解耦的模態坐標系(AmBmCm)中(下標m表示模態坐標),grammians有下列性質[8-9]:
(1)近似對角陣,即

這里 wc,i和 Wo,i是模態能控性和能觀性系數。
在對角陣中的對角項可表達為近似解析的解如下:

其示2-范數。
這個性質表明,在某種解耦的模態坐標系,不用計算行列式Am,grammian計算被大大簡化了;同時也說明,第i個振型能控性近似與第i個輸入的系數(矩陣)的平方成正比,第i個振型能觀性近似與第i個輸出的系數(矩陣)的平方成正比,它們都與第i個振型的阻尼和頻率成反比。Hankel norm的值是兩者的幾何平均值,即
(2)令 G(ω)=Cm(jωI-Am)-1Bm為模態坐標系統(AmBmCm)的傳遞函數(此式中的 j為虛部符號),則第i個模態的 Hankel norm恰為傳遞函數的模,即

上述性質表明,把上部結構按 (7)、(8)解耦成(AmBmCm)的形式,不但可以使問題具有解析解的可能,還使與位置相關的能控性和能觀性有了較清晰的物理意義:Hankel norm相當于傳遞函數峰值的二分之一。
只安裝一個控制器或傳感器的Hankel norm與安裝s個控制器或r個傳感器在第i模態(振型)的Han-kel norm的關系,是平方和均值(rms)關系,可以用下式表達[8]:
位置指數σij可以正則化評估第j個控制器在第i個模態(振型)的值,如式(14)所示:

上述位置指數可以很方便地排列成矩陣形式,如下所示:
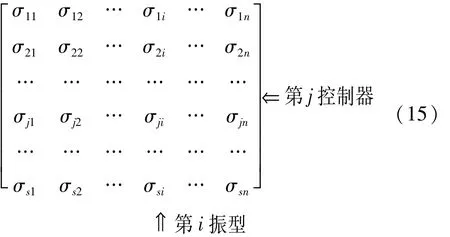
位置指數矩陣可看出有兩個著眼點:第一,可考察某個位置的控制器(傳感器)對所有振型的重要程度,即從矩陣的列來看,其中第j項表示第j個控制器(傳感器)對所有振型的位置指數:


這個方法強調的是一個位置的整體重要性,而不強調其對某特定振型的作用,所以可能出現高振型導致的大的指數值。它不符合基礎減隔震系統低頻主導的設計目標,所以本文不考慮。
第二個角度,考察所有位置對一個振型的重要性,即從矩陣的行來看,是本文所關注的。其中第i項表示所有位置對第i個振型的位置指數:

本文的位置指數以每個位置對低階隔振振型(尤其第一振型)的貢獻為關注重點,對應較小指數的位置將不設隔振墊。
當控制器或傳感器有太多的位置可選時,重要性按指數值大小排序可能不夠[8]。假設有一個位置有較大的指數值,那么與它很近的位置應該也會有較大的控制影響力,即較大的指數。最好是通過相關系數排除相關度高的位置[8]。首先定義一個基于第i個位置的、非正則化的Hankel范數的向量gi:

第i個位置和第k個位置的相關系數ρik定義為:

任給一個小的正數ε,例如ε=0.001,定義一個選擇指數 I(k)=1,k=1,…,s,其中 s是控制器(傳感器)的個數,為:

如果I(k)=1,那么第k個控制器(隔振墊)位置即被接受;如果I(k)=0,那么第k個控制器(隔振墊)位置即被排除。對I(k)=0,兩個位置i和k或者高度相關(ρik>1-ε),或者第 i個位置具有更高的 σi。
基于上述理論,求解最優位置的步驟如圖2。

圖2 最優隔振裝置解題流程圖Fig.2 Flow chart of optimal isolator location solution
3 計算與驗證
計算表明,指數σij比較大的位置基本位于基礎外圍的角落附近和南部邊緣,尤其靠近西南角(#3)和東北角(#19),這兩點距質心最遠,r-方向振型影響最大。圖3為基于Hankel norm的位置指數計算圖。橫坐標為隔振墊位置編號,縱坐標為σij值。
圖3(a)為1、2、3模態(x-,y-和 r-方向的第一振型)在 92個位置的數值,圖 3(b)為 4、5、6模態(x-,y-和r-方向的第二振型)的。可見,指數較大的位置對上述6個振型基本一致,在x-,y-和r-方向有所不同。這些位置影響x-振型的位置是(#1-3,31,60~65,90等)南面邊緣處。影響y-方向的位置則不明顯。原因是結構不規則,兩個方向互相影響,但x-方向偏心更多。綜合考慮各種可能情況和相關因素,下列位置(共22個)為初選結果:


圖3 隔振裝置布置之Hankel norm指數Fig.3 Isolation device placement Hankel norm indices
假設ε=0.001,對這22個選項進行相關性排除,排除I(k)=0的7個左右就剩設計需要的15個。
根據表 2,位置 12,13,43,73,74,75,87,它們的I(k)=1,是留下來的。表3總結了其余位置(第1列)及與其高度相關的位置(第2列,I(k)=0)。兩欄選一,即為彼此不相關度,或相關度較小,這些位置也將被保留。
從表3看出,3號、92號、63號、64號,91號出現頻率高,說明與其它位置相關度高。刪去它們,剩下17位置。但30號與40、49號相關度高,19號與80、81號相關度高,排除4個,剩13個,它們為:
1,2,12,13,19,30,31,43,62,73,74,75,87。這13個的布置圖標注在圖1中,以圓圈表示。

表3 隔振相關位置Tab.3 Correlated locations of isolators
剩下的13個比15個的目標少兩個,由于初選的22個是按照σij的絕對值大小選的,樣本少了點,也沒有考慮凹角的兩條邊。根據觀察,考慮平面布置,選取24號與88號附近的點,并把12號和13號換成長邊的中部和下部的點,應該比較好,且能符合設計要求。但此次計算在初選范圍和平面布置方面只做了上述選擇,作為方法的實例應用。
另外,如圖2流程圖的最后一步,所得最優位置組合,需應用時程分析或其它方法,經過與其它組合進行比較,比較其對上部結構的抗震性能控制效果,來驗證其為最優。但本研究尚未進行這方面的工作,將待日后逐步完善。
4 結 論
本文提出了一種可對基礎減隔震裝置位置選優的,基于能控性和能觀性的方法,在控制理論應用于土木工程的最優化研究方面做了嘗試和探索。該法通過模態坐標轉換,計算結構狀態方程的系數矩陣,以及Hankel奇異范數,來構造位置指數矩陣,并用相關性計算排除相關度高的位置,避免控制力重復施力而實現最優化。所提方法通過一個平面不規則的多層RC工程實例進行了示范計算,所得結果符合工程經驗判斷,其可靠性需進一步研究。
[1]王曉明.基于能觀能控理論的航天器自主導航與控制方法研究[D].哈爾濱:哈爾濱工業大學,2009.
[2]胡宗波,張波,鄧衛華,等.PWM DC-DC變換器混雜動態系統的能控性和能觀性[J].電工技術學報,2005,20(2):76-82.HU Zong-bo, ZHANG Bo, DENG Wei-hua, et al.Controllability and observability of PWM DC-DC converters as hybrid dynamic systems[J].Transactions of China Electrotechnical Society,2005,20(2):76-82.
[3]Longman R W,Siilin S W,Li T,et al,The fundamental structure of the degree of observability[R].AIAA/AAS,San Diego,1982:82-1434.
[4]Moore B C.Principle component analysis in linear systems:Controllability,Observability,and Model Reduction[J].IEEE Transactions on Automatic Control,1981,26(1):17-32.
[5]Hamdan A M A, Nayfeh A H. Measures of modal controllability and observability for first-and second-order linear systems[J].Journal of Guidance,Control,and Dynamics,1989,12(3):421-428.
[6]Choi J W,Park U S,Lee S B.Measures of modal controllability and observability in balanced coordinates for optimal placement of sensors and actuators:a flexible structure application[C].Proceedings of SPIE,Smart Structures and Materials 2000:Mathematics and Control in Smart Structures,2000,3984:425-436.
[7]Panossian H,Gawronski W,Ossman J.Balanced shaker and sensor placement for modal testing of large flexible structures[C].1998,IMAC-XVI,16th International Modal Analysis Conference-Model Updating & Correlation, Santa Barbara,CA.
[8]Gawronski WK.Dynamics and control of structures:A Modal Approach[M].1998,Springer-Verlag New York,Inc.
[9]Silva S,Lopes Jr V.Robust control to parametric uncertainties in smart structures using linear matrix inequalities[J].Journal of the Brazil Society of Mechanical Science&Engineering,2004(4):430-437.
[10] Narasimhan S,Nagarajaiah S,Johnson E A,et al.Smart base isolated benchmark building,part I:problem definition[J].Journal of Structural Control and Health Monitoring,2005;DOI:10.1002/stc.99.
[11]Nagarajaiah S,Narasimhan S.Smart base isolated benchmark building part II:sample controllers for linear and friction isolation[J].Journal of Structural Control and Health Monitoring, Published Online, 2005; DOI: 10.1002/stc.100.
[12] Erkus B,Johnson E A.Smart base isolated benchmark building part III:a sample controller for bilinear isolation[J]. Journal of Structural Control and Health Monitoring2004;DOI:10.1002/stc.101.
[13]Wang Yu-mei.Control strategies for 3D smart base isolation systems using modal and nodal approaches[D].Ph.D Dissertation,Washington University in St.Louis,2006.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00