基于克隆選擇和粒子群混合算法的導墻結構損傷識別
2014-09-20 02:57:30歐陽秋平何龍軍練繼建陳媛媛
振動與沖擊 2014年17期
歐陽秋平,何龍軍,2,練繼建,陳媛媛,馬 斌
(1.天津大學 水利工程仿真與安全國家重點實驗室,天津 300072;2.交通運輸部水運科學研究院,北京 100088;3.中水北方勘測設計研究有限責任公司,天津 300222)
結構損傷診斷可分為確定損傷是否存在、確定損傷位置、評估損傷程度以及預測結構剩余壽命4個層次[1]。近年來,利用模態信息的改變來檢測結構損傷的方法已引起土木、機械和航空等工程界的廣泛關注[2-5]。然而對于許多大型工程結構而言,人工激振是非常困難甚至是不可能進行的,所以,利用環境激勵下的模態數據來識別結構損傷的方法已越來越引起人們的重視[6-7]。
導墻結構由于長期承受著高速水流和風等多種環境荷載的作用,在疲勞和腐蝕影響下容易發生開裂損傷,而若結構損傷發生在水下部分,則不易直接被發現,而且一旦發生損傷,在高速水流的激振作用下,破壞范圍會迅速擴展,可能導致整個結構的失效[8],如美國的Texarkana大壩、Trinity大壩和Navajo大壩的消力池導墻,均由于高速水流誘發了強烈振動而破壞[9];我國的萬安水利樞紐溢洪道導墻在運行中倒塌,烏江渡水電站左岸滑雪道右導墻出現強烈的流激振動現象等[10]。因此,為了保證水工結構的運行安全,就應對導墻結構進行定期的損傷檢測,及早發現損傷并采取適當措施,避免造成人員傷亡事故和重大經濟損失。由于大型水工結構的模態振型在實測中較難精確獲得,且很多部位往往處于水下,測點布置受到很大限制,因此基于模態振型及其衍生指標的損傷診斷方法不適用于大型水工結構。因結構的模態頻率比較容易獲得且能保證較高的實測精度,所以在實際工程中更具應用價值[11]。
由于體積龐大及環境激勵輸入的未知性和隨機性等因素,使結構損傷診斷在大型水工結構中的應用面臨很大挑戰。人工神經網絡[12]、支持向量機[13]等智能算法都已在智能損傷診斷研究中采用。但是,人工神經網絡和支持向量機算法在尋優時必須首先進行預測模型的訓練,這就需要海量準確的樣本信息作支持,工作量巨大。
基于智能算法的模型修正方法是近期結構損傷識別領域的研究熱點之一[1,14-15]。它主要是通過智能算法的尋優能力,匹配結構的實測指標和有限元模擬指標以尋求反映結構真實性態的有限元模型,進而達到準確識別結構損傷位置和程度的目的。遺傳算法和粒子群算法作為全局尋優算法,都力圖在自然特性的基礎上模擬個體種群的適應性,采用一定的變換規則通過搜索空間求解,而不需要海量的模態信息和預測模型訓練。雖然遺傳算法為全局尋優提供了一個比較可靠的工具,但是其在尋優性能上仍然存在很大的發展空間。粒子群算法自1995年被Kennedy等[16]提出以來,以收斂速度快、參數設置少、程序實現簡單和具有深刻的智能背景等特點,在求解非線性不可微和多峰值的優化問題中表現出了較強的生命力。
因此,本文基于實數編碼克隆選擇和粒子群混合算法(A real encoding hybrid algorithm of clonal selection and particle swarm optimization,RCSA-PSO)優化模態頻率指標,提出一種適合于環境激勵下大型水工結構的智能損傷診斷方法。首先,提出了一種全局尋優能力更強的新型粒子群算法,通過不斷更新有限元模型參數,可高效可靠地搜索到與實測信息匹配的結構損傷狀態;其次,提出了基于低階模態頻率的損傷指標,并加入了損傷懲罰因子,以指導有限元模型與測試信息的匹配;第三,以某導墻的多工況損傷識別為例,研究了含噪聲條件下該損傷診斷方法的識別效果,解決了導墻結構水下部分損傷檢測難的問題,證明了該識別方法的適用性。
1 實數編碼克隆選擇和粒子群混合算法
1.1 實數編碼粒子群算法
粒子群算法的基本思想是受他們早期對許多鳥類的群體行為進行建模與仿真研究結果的啟發[17]。基本粒子群優化算法的思想可表述為:每個優化問題的潛在解都是搜索空間的粒子,所有的粒子都有一個被優化的函數決定的適應值,每個粒子還有一個速度向量決定他們飛行的方向和距離,然后粒子們就追隨當前的最優粒子在解空間中的搜索。粒子群優化算法初始化為一群隨機粒子,然后通過迭代找到最優解。在每一次迭代中,粒子通過跟蹤兩個極值來更新自己,第一個就是粒子本身到當前時刻為止找到的最好解,這個解稱為個體最好值,另一個極值就是整個種群到當前時刻找到的最好解,這個值是全局最好值。在找到這兩個極值后,粒子通過三方面來更新自己的速度和新的位置,包括粒子先前的速度,用來說明粒子目前的狀態;個體的認知部分,使粒子有較強的全局搜索能力;以及社會共享信息,使粒子從其他優秀粒子中汲取經驗,加強搜索能力[18]。于是微粒i在第d維子空間中的狀態更新方程如下所示:
式中:上標k代表微粒i所在的步數,下標d代表微粒i的第d個維度,和分別為微粒i第d個維度在第k步和第k+1步時的速度,和分別為微粒i的第d個維度在第k步時和第k+1步時的位置,p為微粒i的歷史最優位置,其與微粒i的當前位置之差的作用是指引該微粒向個體最優解靠攏;為微粒群的全局歷史最優位置,其與微粒i當前位置之差的作用是確定當前微粒向全局最優值運動的分量;α為慣性權重;c1和c2為加速常數;r1和r2為(0,1)之間的兩個相互獨立的隨機數;N為粒子群的規模;D為各粒子的維度。
為了同時對損傷位置和損傷程度尋優,本文采用實數編碼形式來編寫解變量。將可能產生損傷的位置和程度的數目作為粒子的維度,每一維度上的數值代表損傷發生的位置或程度,即按照[損傷位置1,損傷程度1,損傷位置2,損傷程度2,…損傷位置n,損傷程度n]進行編碼。若對位置和程度進行歸一化,則有xid∈[0,1]。例如,某結構共有3處可能存在的損傷,若算法尋找到的最優解為[0.2,0.5,0.5,0.3,0.7,0.4]T,則表明該結構的損傷位置發生在0.2、0.5和0.7位置處,相應的損傷程度為50%、30%和40%。可見,應用實數編碼方式表示結構的損傷位置和損傷程度是十分方便和有效的。
1.2 實數編碼克隆選擇和粒子群混合算法
在粒子群優化算法的運行過程中,如果某粒子發現了一個當前最優位置,其他粒子將迅速向其靠攏,出現“聚集”現象,導致種群多樣性的降低。如果當前所發現的最優位置是局部最優點,粒子群就有可能無法在解空間內重新搜索,算法陷入局部最優,出現早熟收斂現象。針對應用粒子群算法求解非線性優化問題過程中存在的早熟和收斂速度慢的問題,為提高粒子群算法的全局收斂性能,本文引入克隆選擇算法[19-20],提出了一種新型克隆選擇和粒子群混合算法,并引入遺傳算法中的變異操作作為克隆選擇算法中的高頻變異算子。
克隆選擇算法是受到免疫系統啟發而發展起來的仿生算法,是模擬自然界生物免疫系統的機理和功能而設計的算法,具有保持種群多樣性的特點。本文在粒子群算法中融合免疫克隆選擇算法的思想,首先根據粒子的親和力對粒子執行按比例克隆復制,然后對克隆后的個體進行克隆高頻變異,最后進行克隆選擇,即從父代個體與子代個體中選擇出最佳個體。成比例克隆復制可以使優良個體得到保護,加快算法收斂;高頻變異為新粒子的產生提供了新的方法,維持種群多樣性;克隆選擇操作有效地避免了算法退化。因此,該混合算法可以增加種群的多樣性,加快算法收斂速度,提高最優解的精度,具有更強的全局尋優能力。本文所提出的算法的實現思想如圖1所示。

圖1 實數編碼克隆選擇和粒子群混合算法的流程圖Fig.1 RCSA-PSO flowchart
混合算法的關鍵步驟如下:
(1)初始化粒子。隨機產生初始群體,初始化粒子的速度和位置信息。置迭代次數Iteration=1,定義最大迭代次數MaxIter,得到相同適應度值的迭代次數Samecounter=0。
(2)更新粒子速度和位置。計算每個粒子的適應度值,并根據粒子適應度值的大小確定個體極值pbest和全局極值gbest,依照式(1)和式(2)更新粒子位置。
(3)抗體親和力計算。抗體親和力是種群中抗體優良的度量標準。在克隆選擇和粒子群混合算法中,將粒子視為抗體,因此抗體親和力就等于粒子的適應度。
(4)克隆復制算子。根據抗體親和力的大小,對親和力高的抗體進行克隆操作。對親和力高的前50%抗體群A,每個抗體進行一次細胞分裂,形成另一個相同的抗體群B。親和力后50%的抗體群C保持不變。可見,該操作一方面通過克隆操作保護了優良基因,加快算法收斂速度,另一方面保留了每一個迭代步中親和力較差的抗體,保持了群體的多樣性。
(5)高頻變異算子。本文中引入遺傳算法中的變異算子進行高頻變異操作。在個體親和力較高的子種群A和B中引入的幅值變異算子,即以一定概率隨機選取粒子中的某些維度進行小幅度的數值調整。在個體親和力較低的子種群C中引入基因替換算子,即以一定概率隨機選取粒子中的某些維度并替換為[0,1]之間的隨機數。可見,幅值變異算子可以對較優的抗體在小范圍進行調整,以達到局部尋優的效果;基因替換算子可對親和力較差的抗體進行某些維度的替換,加速產生適應度更大的抗體。高頻變異算子提供了產生新解的方法,使得新解的產生不受其它抗體的影響,提高了種群的多樣性。
(6)克隆選擇算子。抗體經過克隆復制、克隆高頻變異后,如果子代個體的適應度高于其父代個體,則選擇出一個適應度最高的子代個體替換對應的父代個體,將更新后的種群作為下一代個體。父代個體與子代個體的混合,避免了算法退化。
(7)比較本次迭代更新前和更新后全局最優適應度值,相等時Samecounter增加1,不相等時更新適應度值且Samecounter清零。
(8)當Samecounter達到50或者Iteration達到最大迭代次數時,終止迭代運算并輸出最終結果;如不滿足,轉入第2步。
需要指出的是,在粒子優化和變異過程中,需添加約束保證粒子各維度的值在[0,1]范圍內搜索。如果超出這一范圍,則置該維度為[0,1]之間的隨機數。
2 基于模態頻率的目標函數
當導墻由于損傷出現裂縫時,其結構模態參數也相應發生改變。其中模態頻率是實測中最易獲得的模態參數,而且精度最容易保證。因此本文中選取導墻的低階模態頻率差作為智能算法尋優的目標函數。規定歸一化的裂縫位置為L,歸一化的裂縫長度為D,如果將L和D定義為待優化的變量,那么損傷識別問題就歸結為一個有約束的非線性優化問題,其目標函數可用實測和數值模擬得出的模態頻率差來表示。定義基于模態頻率差的目標函數為:

其中:m為測試模態數,下標A和E分別代表計算結果和實測結果,ωj代表結構的第j階頻率。
值得注意的是,在損傷識別過程中,不僅要追求測試信息與數值模擬結果的最優匹配,還應盡可能地找到最小程度的損傷模式。為此,引入了損傷懲罰因子,以避免由于噪聲干擾等導致的損傷診斷失誤。
因此,指導實測信息與數值模擬匹配的適應度函數可表示為:

其中:∑D為損傷模式對應的裂縫長度的總和;γ的取值取決于數值模型和試驗數據的可信程度。可信程度越高,γ值應越小。
綜上所述,該優化問題可定義為:

其中:n為結構可能產生裂縫的數目。式(5)將損傷識別問題轉化為一個有約束條件的非線性最小化問題,即函數適應度值越小,匹配程度越高。
3 應用與驗證
本文提出的損傷識別方法的整體思路為:在Mat-lab平臺下對有限元計算軟件進行二次開發,利用改進粒子群算法的尋優能力,不斷更新有限元模型中損傷的位置和程度,以尋求模擬計算出的模態參數指標與實測模態參數指標的最優匹配,從而得到反映結構真實性態的有限元模型,達到準確識別結構損傷位置和程度的目的。基于智能算法優化模態頻率指標的損傷識別方法的具體步驟如圖2所示。
3.1 研究對象和模態階次的選取
本文選取某水電站的中導墻作為研究對象。取兩結構縫之間的24 m導墻段進行分析,導墻懸臂段高50 m。由于導墻上部懸臂部分剛度相對較小,本文將懸臂部分作為裂縫容易發生的部位進行重點分析,以驗證本文所提出的新型智能損傷識別方法在環境激勵下導墻結構損傷識別中的適用性。
有限元模型如圖3所示,其中坐標原點選在導墻懸臂段的根部。模型采用8節點三維塊體單元,利用實體楔形模擬裂縫,假定導墻懸臂段兩側均有可能產生裂縫且裂縫近似水平。模擬裂縫的長度和高度如圖所示,分別利用懸臂段高度50 m和寬度24 m對裂縫位置和長度進行歸一化。混凝土材料密度取2 400 kg/m3,彈性模量取35 GPa,泊松比取0.167。地基采用無質量彈性地基,彈性模量取30 GPa,泊松比取0.25。為模擬工程實際,以附加質量的形式考慮流體的影響,計算濕模態下導墻的模態頻率。因為大型混凝土結構的低階模態具有較大的振型參與系數,通常能夠描述結構系統的動態特性,且結構的低階模態參數通常較易獲取并能保證足夠精度,因此本文將該導墻的前6階模態選作目標模態。不失一般性的,本文僅針對圖3所示Y向振動特性進行損傷識別研究。

圖2 本文提出的智能損傷識別方法的流程Fig.2 The procedure of the proposed method for intelligence damage identification

圖3 導墻有限元模型Fig.3 FE model of the guide wall structure
3.2 考慮噪聲影響的模態參數識別
本文中各損傷工況的實測信號均來自于環境激勵下的有限元模擬。在有限元模擬中,以高斯白噪聲作為輸入(模擬環境激勵),分析導墻的振動響應,其中時程信號的采樣頻率為100 Hz,采樣時間20 s。在各測點的位移時程信號中加入白噪聲數據,即:

式中:xi和x分別是i測點加入噪聲前后的信號,randn表示均值為零、標準差為1的高斯白噪聲,ns表示時程信號中的噪聲水平。因此,加入噪聲的標準差為該測點時程數據最大值的ns倍。本文取ns為5%。測點可根據改進有效獨立法[21-22]進行選擇,這里不再贅述。
以兩處裂縫損傷工況(一側裂縫 L1=0.7,D1=0.2;另一側裂縫 L2=0.5,D2=0.3)為例,圖 4和圖 5中分別為導墻結構在環境激勵下添加5%白噪聲時的位移時程信號圖和通過現代譜方法得出的位移信號歸一化的功率譜圖。將識別出的前六階模態頻率作為有限元模型的匹配導向,利用智能算法搜索與實測模態信息最匹配的結構損傷模式。
3.3 方法的性能驗證與比較
以噪聲水平5%時,兩處裂縫損傷工況(一側裂縫L1=0.7,D1=0.2;另一側裂縫 L2=0.5,D2=0.3)為例。經驗證,損傷懲罰因子γ=0.05時算法能獲得較好的尋優效果。
假定該導墻兩側各有兩處可能的損傷,則每個粒子的維度為8(包含裂縫位置維度和長度維度各4個)。運用實數編碼克隆選擇和粒子群混合算法結合適應度函數進行結構損傷識別。其中算法的基本參數如下:種群大小為100,c1和c2均取0.5。當算法到達最大迭代次數1 000,或者連續搜索50次最優適應度值不變時,算法終止。為了驗證算法性能,選取實數編碼粒子群算法(Real encoding particle swarm optimization algo-rithm,RPSO)和實數編碼遺傳算法(Real encoding ge-netic algorithm,RGA)與本文的新型算法進行全局尋優性能比較。其中實數編碼粒子群算法的參數設置與實數編碼克隆選擇和粒子群混合算法一致,實數編碼遺傳算法的基本參數參照文獻[1]中選取。針對目標函數,三種智能算法分別運行5次,典型的尋優過程如圖6所示。由圖6可以看出,本文中提出的實數編碼克隆選擇和粒子群混合算法在解決損傷識別問題的尋優效率上有明顯優勢,該算法的收斂速度較快,且尋優效果在三種算法中最接近理論最優解(0.025)。而實數編碼粒子群算法雖然收斂也較快,但極易陷入局部最優值,尋優結果較實數編碼克隆選擇和粒子群混合算法有很大差距。實數編碼遺傳算法是一種改進遺傳算法,該算法在損傷位置和程度的尋優中收斂速度較上述兩種粒子群算法慢,尋優效果較實數編碼粒子群算法好,但是相比實數編碼克隆選擇和粒子群混合算法仍有一定差距。綜上所述,實數編碼克隆選擇和粒子群混合算法有較強的跳出局部最優的能力,在解決復雜的結構損傷識別問題時能夠較快的向全局最優值逼近,是一種很有效率的全局優化算法。

圖4 典型位移時程信號圖Fig.4 Time history signals of displacement

圖5 位移信號的歸一化功率譜圖Fig.5 Normalized power spectrums of displacement

圖6 三種智能算法的典型優化過程Fig.6 Fitness curves of the three intelligence algorithms
另外,從圖6中還可以看出,基于模態頻率的目標函數對于損傷的區分度很高,本例中的區分度約為225。本文中規定當識別出的裂縫長度小于0.03時,認為損傷對結構的影響較小,該損傷可忽略不計。利用本文的新型智能損傷識別方法能夠搜索到的最匹配的損傷程度和位置和真實情況如圖7所示。可見,該方法能夠準確地識別出真實的結構損傷情況。
3.4 損傷識別結果
在5%噪聲影響下,分別利用本文所提出的智能損傷識別方法及已有方法對一處損傷、兩處損傷和多處損傷等工況進行裂縫位置和長度的識別,得到識別結果如表1所示。從表1可以看出,本文所提出的基于克隆選擇和粒子群混合算法的智能損傷識別方法在5%噪聲干擾下仍然能夠較準確地識別出10個損傷工況下的裂縫位置和長度,證明本文提出的損傷識別方法具有一定的抗噪聲能力和較高的識別精度;基于RP-SO算法的識別方法僅能識別工況1~3中一處損傷的情況,對于工況4~10中兩處及以上損傷工況,由于RPSO算法易陷于局部最優值,因此識別結果的精度很低,甚至得到錯誤的損傷位置和程度值;基于RGA算法的識別方法在識別一處和兩處損傷時較理想,對于工況7~10中兩處以上的損傷情況則無法正確識別,說明RGA算法的識別能力較本文提出的混合算法有一定差距。

圖7 基于本文方法的損傷識別結果Fig.7 Damage detected by the proposed method
綜上所述,由于全局尋優能力的加強,本文所提出的基于RCSA-PSO算法的智能損傷識別方法對于結構損傷具有很高的識別精度,且在較復雜的損傷工況中更能體現出其優勢。
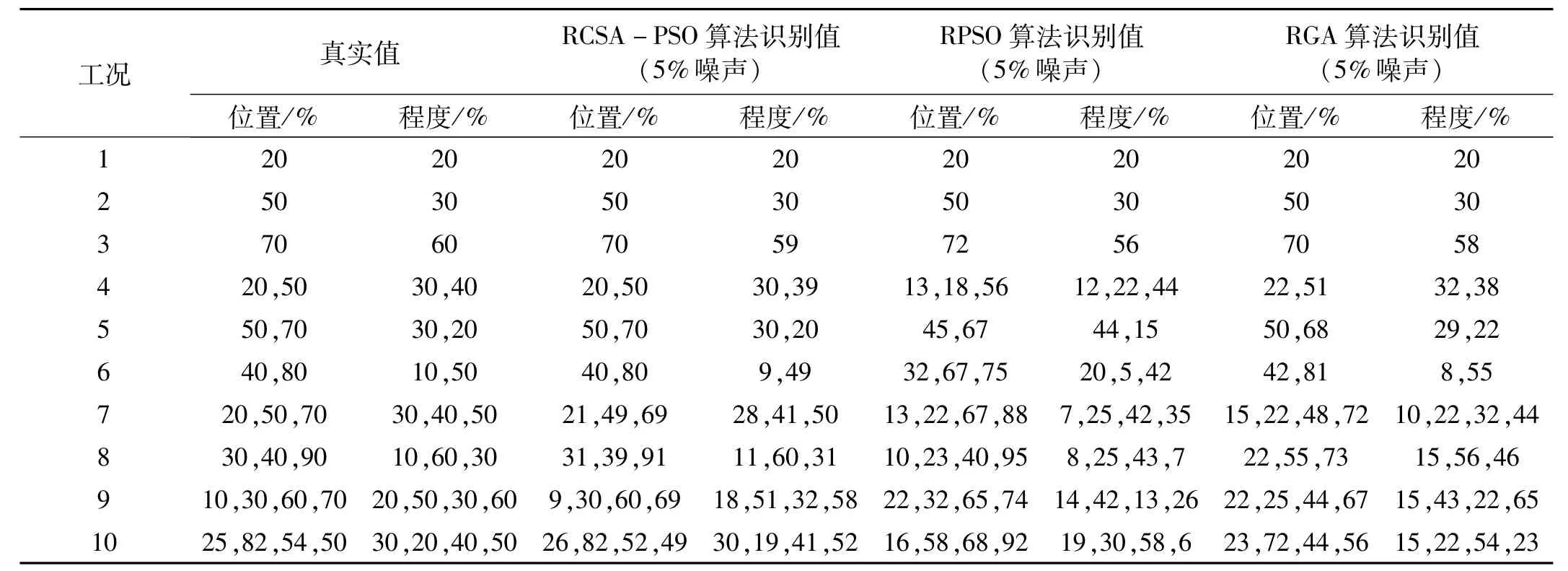
表1 損傷識別結果Tab.1 Results of damage detection
4 結 論
本文提出了一種基于實數編碼克隆選擇和粒子群混合算法優化模態頻率指標的導墻結構智能損傷診斷方法,解決了導墻結構水下部分損傷檢測難的問題。該方法僅需可測性強的低階模態頻率,且避免了神經網絡和支持向量機預測時大量的樣本計算和模型訓練,適合于環境激勵條件下的大型水工結構的無損動態損傷檢測。結合在某導墻損傷識別中的應用,得到主要結論如下:
(1)經算法穩定性驗證,本文提出的新型智能算法能夠快速收斂于全局最優值。選取實數編碼粒子群算法和實數編碼遺傳算法與本文的新型算法進行全局尋優性能比較,結果表明:實數編碼克隆選擇和粒子群混合算法收斂速度快,且有較強的跳出局部最優的能力,在解決復雜的非線性優化問題時能夠較快的逼近全局最優值,是一種很有效率的全局優化算法。
(2)利用基于模態頻率的適應度函數進行裂縫位置和長度的識別,結果表明:本文提出的基于模態頻率的適應度函數能夠準確地識別結構損傷的位置和程度,且該指標可測性較強,具有很強的實際可操作性。
(3)通過應用新型智能算法對有限元模型的參數進行優化,尋求與實際損傷結構模態頻率指標的最優匹配,進而確定不同損傷工況下的損傷位置和程度。經驗證表明:與現有方法相比,該智能損傷識別方法對噪聲條件下各種損傷工況具有更高的識別精度,方法穩定可靠。
綜上所述,本文所提出的基于實數編碼克隆選擇和粒子群混合算法優化模態頻率指標的損傷診斷方法是十分有效的,能夠準確地識別出導墻在不同損傷組合時的結構性態,可嘗試在各類大型水工結構的損傷診斷中推廣應用。
[1]Meruane V,Heylen W.An hybrid real genetic algorithm to detect structural damage using modal properties[J].Mechanical Systems and Signal Processing,2011,25(5):1559-1573.
[2]Doebling SW,Farrar CR,Prime M B.A summary review of vibration-based damage identification methods[J].Shock and Vibration Digest,1998,30(2):91-105.
[3]Qian J R,Ji X D,Zhang W J.Damage detection test of a substructure model of the National Swimming Center[J].Science in China Series E:Technological Sciences,2008,51(7):940-948.
[4]付春雨,單德山,李喬.列車行駛時橋梁結構損傷預警的時域方法[J].振動與沖擊,2011,30(1):27-32.FU Chun-yu,SHAN De-shan,LI Qiao.Time domain method for bridge structural damage alarming when a train is running[J].Journal of Vibration and Shock,2011,30(1):27-32.
[5]杜永峰,李萬潤,李慧,等.基于時間序列分析的結構損傷識別[J].振動與沖擊,2012,31(12):108-111.DU Yong-feng, LI Wan-run, LI Hui, et al. Structural damage identification based on time series analysis[J].Journal of Vibration and Shock,2012,31(12):108-111.
[6] El-Ouafi Bahlous S,Smaoui H,El-Borgi S.Experimental validation of an ambient vibration-based multiple damage identification method using statistic al modal filtering[J].Journal of Sound and Vibration,2009,325:49-68.
[7]常軍,任永輝,陳忠漢.環境激勵下結構損傷識別的綜合指標法試驗研究[J].工程力學,2011,28(7):130-135.CHANG Jun, REN Yong-hui, CHEN Zhong-han.Experimental investigation of structural damage identification by combination index method under ambient excitation[J].Engineering Mechanics,2011,28(7):130-135.
[8]練繼建,張建偉,王海軍.基于泄流響應的導墻損傷診斷研究[J].水力發電學報,2008,39(1):96-101.LIAN Ji-jian,ZHANG Jian-wei,WANG Hai-jun.Study on damage diagnosis of guide wall based on flood discharge response[J].Journal of Hydroelectric Engineering,2008,39(1):96-101.
[9]練繼建,崔廣濤,黃錦林.導墻結構的流激振動研究[J].水利學報,1998,11:33-37.LIAN Ji-jian,CUIGuang-tao,HUANGJin-lin.Study on flow induced vibration of spillway guide wall[J].Journal of Hydraulic Engineering,1998,11:33-37.
[10]練繼建,李松輝.基于支持向量機和模態參數識別的導墻結構損傷診斷研究[J].水利學報,2008,39(6):652-658.LIAN Ji-jian,LI Song-hui.Damage diagnosis of spillway guide wall based on support vector machine and modal parameter identification [J]. Journal of Hydraulic Engineering,2008,39(6):652-658.
[11]李松輝.基于機器學習和模態參數識別理論的水工結構損傷診斷方法研究[D].天津:天津大學,2008.
[12]熊仲明,王超,林濤.基于神經網絡的大跨鋼結構缺陷損傷的定位研究[J].振動與沖擊,2011,30(9):191-196.XIONG Zhong-ming, WANG Chao, LIN Tao. Defect determination of large-span steel structure based on neural network[J].Journal of Vibration and Shock,2011,30(9):191-196.
[13]Song H Z,Zhong L,Han B.Structural damage detection by integrating independent component analysis and support vector machine[J].International Journal of Systems Science,2006,37(13):961-967.
[14] He R,Hwang S.Damage detection by an adaptive real-parameter simulated annealing genetic algorithm [J].Computers and Structures,2006,84(31-32):2231-2243.
[15] Vakil-Baghmisheh M,Peimani M,Sadeghi M H,et al.Crack detection in beam-like structures using genetic algorithms[J].Applied Soft Computing,2008,8(2):1150-1160.
[16]Kennedy J,Eberhart R C.Particle swarm optimization[C].In:Proc IEEE Conf on Neural Networks,Perth,1995:1942-1948.
[17]練繼建,何龍軍,王海軍.基于PSO優化LS-SVM算法的水電站廠房結構振動響應預測[J].中國工程科學,2011,13(12):45-50.LIAN Ji-jian,HE Long-jun,WANG Hai-jun.Prediction of vibration response of powerhouse structures based on LS-SVM optimized by PSO[J].Engineering Sciences,2011,13(12):45-50.
[18]王星星,吳貞煥,楊國安,等.基于改進粒子群算法的最小二乘影響系數法的理論及實驗研究[J].振動與沖擊,2013,32(8):100-104.WANG Xing-xing,WU Zhen-huan,YANG Guo-an,et al.Theory and tests fo least square influence coefficient method based on an improved particle swarm optimization algorithm[J].Journal of Vibration and Shock,2013,32(8):100-104.
[19]Burnet F M.The clonal selection theory of acquired immunity[M].Cambridge:Cambridge University Press,1959.
[20]De Castro L N,Von Zuben F J.Learning and optimization using the clonal selection principle[C].IEEE Transactions on Evolutionary Computation,Special Issue on Artificial Immune Systems,2002,6(3):239 251.
[21]Lian J J,He L J,Wang H J.Optimal sensor placement in hydropower house based on improved triaxial Effective Independence method[J].Water Science and Engineering,2012,5(3):329-339.
[22]何龍軍,練繼建,馬斌,等.基于距離系數-有效獨立法的大型空間結構傳感器優化布置[J].振動與沖擊,2013,32(16):13-18.HE Long-jun,LIAN Ji-jian,MA Bin,et al.Optimal sensor placement for large space structures based on distance coefficient-effective independence method[J].Journal of Vibration and Shock,2013,32(16):13-18.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39