永磁同步電機直接轉(zhuǎn)矩控制高速運行范圍拓寬
2014-09-20 06:07:36林斌孫丹賀益康
電機與控制學報 2014年9期
林斌, 孫丹, 賀益康
(浙江大學電氣工程學院,浙江杭州 310027)
由PMSM的轉(zhuǎn)矩和定子磁鏈公式(2)、式(3)可知,每一組(id、iq)都將對應一組(Te、ψs),因此可得到PMSM DTC在MTPA算法下的轉(zhuǎn)矩與定子磁鏈的關系,如圖3中L1段所示。圖3為不同算法下的轉(zhuǎn)矩-定子磁鏈關系圖。可看出,MTPA運行階段轉(zhuǎn)矩隨定子磁鏈的增大而增大。
點A是MTPA曲線與電流限制圓的交點,若在該點上運行,PMSM可在保持定子電流為最大值條件下輸出最大轉(zhuǎn)矩。將式(11)中Is取值為Imax,可得A點所對應的電流、轉(zhuǎn)矩、定子磁鏈為
0 引言
直接轉(zhuǎn)矩控制(direct torque control,DTC)在定子坐標系中實施運算,無需坐標旋轉(zhuǎn)變換及轉(zhuǎn)子位置信息,具有結(jié)構(gòu)簡單,轉(zhuǎn)矩動態(tài)響應快,參數(shù)魯棒性強等諸多優(yōu)點,作為一種高性能的交流電機控制策略,其研究得到了學術界和工業(yè)界的廣泛關注[1-6]。
然而基于開關表和滯環(huán)控制器的常規(guī)DTC方式,存在轉(zhuǎn)矩波動大、開關頻率不固定等缺點[1]。已有大量文獻對其進行了改進研究,提高了系統(tǒng)穩(wěn)態(tài)精確度[2-6]。其中文獻[2-3]將空間電壓調(diào)制(space vector modulation,SVM)方法引入永磁同步電機(permanent magnet synchronous motor,PMSM)常規(guī)DTC中,雖系統(tǒng)復雜度略有增加,但實現(xiàn)了開關頻率固定,極大提高了系統(tǒng)穩(wěn)態(tài)精確度,也保持了快速的動態(tài)響應性能,被廣泛認可。但對于PMSM的大量DTC改進研究都是在基速以下,較少涉及弱磁高速運行。
DTC方式下PMSM的弱磁高速運行理論源自矢量控制(vector control,VC)下的弱磁運行。PMSM弱磁高速運行時應滿足電壓和電流的限制,有文獻分別討論了在該限制條件下PMSM基于VC的最大轉(zhuǎn)矩電流比(maximum torque per ampere,MTPA)[7]、恒 功 率 轉(zhuǎn) 速 比(constant power speed range,CPSR)[8]、最大轉(zhuǎn)矩電壓比(maximum torque per voltage,MTPV)[8]等3種運行方式,以期實現(xiàn)最大轉(zhuǎn)矩及高速的運行目標。VC是通過對定子電流矢量的交、直軸分量進行獨立(解耦)控制而實現(xiàn)的,DTC則是通過對轉(zhuǎn)矩和定子磁鏈的控制來實現(xiàn)的。由于PMSM的轉(zhuǎn)矩、定子磁鏈與交、直軸電流分量有相互對應關系,據(jù)此文獻[9]討論了基于DTC的MTPA和CPSR弱磁方法。也有文獻指出在電流限制條件下PMSM DTC弱磁運行時,如轉(zhuǎn)矩角超過最大允許值,可能會導致電機運行失步,無法實現(xiàn)PMSM的高速穩(wěn)定運行[9-10]。
按照VC方式直接推得的DTC弱磁控制算法在轉(zhuǎn)矩和定子磁鏈計算時需用到交、直軸電感和永磁體磁鏈,對電機參數(shù)的依賴很大。因而需探求一種結(jié)構(gòu)簡便、參數(shù)魯棒性更好的控制方法。文獻[11-12]提出了一種新穎的電磁轉(zhuǎn)矩給定值的計算方法,但需用到三相靜止坐標系到兩相旋轉(zhuǎn)坐標系的旋轉(zhuǎn)變換,計算量較大。
為解決DTC方式下PMSM的運行穩(wěn)定性問題,本文將首先系統(tǒng)地分析MTPA、CPSR和MTPV 3種算法下PMSM的運行狀態(tài),指出高速穩(wěn)定運行的關鍵。其次在常規(guī)SVM-DTC策略的基礎上,提出一種轉(zhuǎn)矩角限幅方法,以拓寬電機穩(wěn)定運行的速度范圍。進一步還提出一種利用定子磁鏈和電流的轉(zhuǎn)矩給定值計算方法,確保了PMSM DTC的高速穩(wěn)定運行,有效提高了系統(tǒng)魯棒性,并使電機穩(wěn)定運行不再受轉(zhuǎn)矩角的影響。詳盡的仿真研究結(jié)果驗證了DTC方式下PMSM的兩種拓寬高速穩(wěn)定運行區(qū)域的方法的可行性和有效性。
1 PMSM的運行階段及轉(zhuǎn)矩角分析
PMSM在不同坐標系下的矢量圖如圖1所示。在轉(zhuǎn)子磁鏈定向的d-q同步旋轉(zhuǎn)坐標系下,PMSM的電壓、定子磁鏈、電磁轉(zhuǎn)矩方程可分別表示為
其中:Vd、Vq、id、iq、Ld、Lq、ψd、ψq分別是d、q軸電壓、電流、電感和定子磁鏈;ψs、ψf分別是定、轉(zhuǎn)子磁鏈;Te是電機的電磁轉(zhuǎn)矩;R是定子繞組的電阻;ω是轉(zhuǎn)子的電角速度,即d-q坐標系的旋轉(zhuǎn)角速度;p是電機的極對數(shù)。

由逆變器驅(qū)動運行的永磁同步電機存在電流和電壓的極限約束條件,即有電流和電壓極限方程為

其中:Imax為允許的最大定子電流;Vmax為允許的最大定子電壓,一般由逆變器直流母線電壓Vdc決定,即Vmax=Vdc/。

式(5)和式(7)表明,電流極限方程可在以id為X軸,iq為Y軸的坐標系內(nèi)形成一個以O1(0,0)為圓心、Imax為半徑的圓;電壓極限方程也可畫成一個以O2(-ψf/Ld,0)為圓心、長短軸與Vmax/ω成正比的橢圓;上述電流限制圓和電壓極限圓如圖2中所示。隨著轉(zhuǎn)速ω的升高,電壓極限圓與轉(zhuǎn)速成反比變小。需要說明的是,文中所繪圖形均依據(jù)下文仿真研究中的嵌入式PMSM參數(shù)所得[1],此類PMSM的特征是電壓限制圓的圓心位于電流限制圓之內(nèi)。
將式(4)帶入式(6),可得
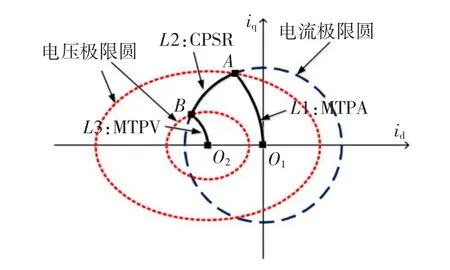
圖2 電流電壓限制圓與運行軌跡Fig.2 The limit circles of current and voltage and the operation loci
在對PMSM進行控制時,需確保id、iq值在電流和電壓限制圓內(nèi)。當電機轉(zhuǎn)速低于基速時,電壓限制圓的半徑較大,id、iq的取值只需滿足電流限制圓的要求,此時通常采用MTPA[7]算法,確保單位電流下輸出最大轉(zhuǎn)矩,其運行軌跡如圖2中L1段所示。當電機運行于基速以上時,電機端電壓達到極限,為保證在同時滿足電流和電壓限幅的條件下電機加速運行,則其運行軌跡必須沿電流限制圓逆時針方向運動,即采用CPSR[8]算法,如圖2中L2段所示。由式(2)可知,如id反向增大可減弱d軸磁鏈,同時id幅值的增大也可導致iq減小,使得定子磁鏈的幅值減小,以弱磁的方式來滿足電壓極限條件。當電機運行于更高轉(zhuǎn)速時,為獲得單位電壓下的最大轉(zhuǎn)矩輸出,可采用MTPV[8]算法,即沿著電壓極限圓縮小的軌跡運行,如圖2中L3段所示。可看出,CPSR階段能同時利用電壓和電流的最大極限容量,而MTPV階段電流并非維持在其極限值,但MTPV階段的輸出轉(zhuǎn)矩將大于CPSR階段,對此后文將予以證明。
為保證PMSM DTC系統(tǒng)的穩(wěn)定運行,必須考察其轉(zhuǎn)矩角的變化情況,因此需對PMSM DTC的MTPA、CPSR和MTPV運行方式進行討論,并對各階段的轉(zhuǎn)矩角情況進行深入分析。
1.1 MTPA
設電流矢量Is與d軸的夾角為γ,有其中,Is為電流矢量Is的幅值。則電磁轉(zhuǎn)矩方程可改寫為

在電流極限約束條件下,要求單位電流輸出最大轉(zhuǎn)矩,可對式(9)求導并整理可得
由PMSM的轉(zhuǎn)矩和定子磁鏈公式(2)、式(3)可知,每一組(id、iq)都將對應一組(Te、ψs),因此可得到PMSM DTC在MTPA算法下的轉(zhuǎn)矩與定子磁鏈的關系,如圖3中L1段所示。圖3為不同算法下的轉(zhuǎn)矩-定子磁鏈關系圖。可看出,MTPA運行階段轉(zhuǎn)矩隨定子磁鏈的增大而增大。
點A是MTPA曲線與電流限制圓的交點,若在該點上運行,PMSM可在保持定子電流為最大值條件下輸出最大轉(zhuǎn)矩。將式(11)中Is取值為Imax,可得A點所對應的電流、轉(zhuǎn)矩、定子磁鏈為
由電壓極限方程可知,電壓極限圓隨著轉(zhuǎn)速的增大而變小。當轉(zhuǎn)速ω小于基速ωb時,電機運行僅需考慮電流限制圓,在A點運行滿足電流限制條件,并可輸出最大轉(zhuǎn)矩。而當ω增大,電壓限制圓逐漸變小將與電流限制圓交于A點,此時需同時考慮電流與電壓的限制要求。
1.2 CPSR
當轉(zhuǎn)速上升到基速ωb、定子端電壓也達到最大值Vmax,id、iq的取值必須同時滿足電壓和電流極限條件。將式(5)和式(7)2個不等式取等號求解可得
同理,根據(jù)式(2)、式(3)可得CPSR算法下的轉(zhuǎn)矩與定子磁鏈的關系,如圖3中L2段所示,圖中ω2>ω1>ωb。可看出,轉(zhuǎn)矩和定子磁鏈均隨著轉(zhuǎn)速的提高而減小,符合弱磁運行時的電機特性。
1.3 MTPV
當電機超過某一轉(zhuǎn)速后,任一給定轉(zhuǎn)速下,電動機電壓極限圓軌跡上存在著一輸出轉(zhuǎn)矩最大的點。
根據(jù)式(7),可得
其中,θ為一角度變量。
則電磁轉(zhuǎn)矩可改寫為

對式(15)求導,并整理可得

令cosθ=λ,則有
同理,由式(2)、式(3)可得MTPV算法下的轉(zhuǎn)矩與定子磁鏈的關系,如圖3中L3段所示。
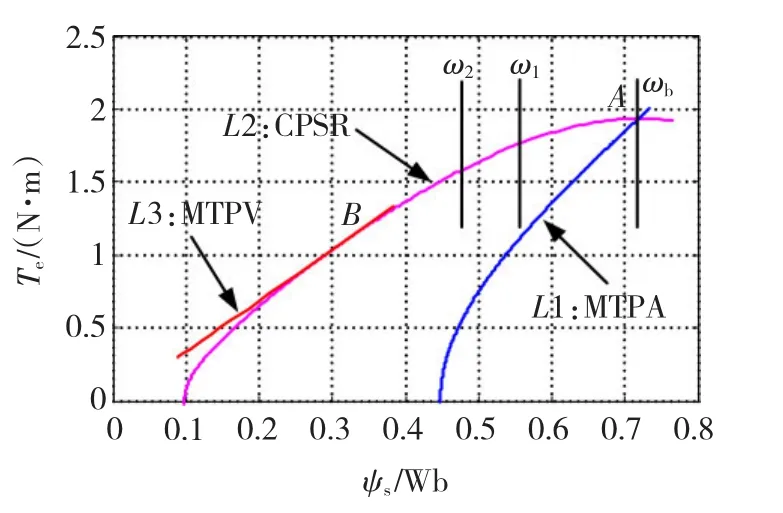
圖3 轉(zhuǎn)矩-定子磁鏈關系圖Fig.3 Relationship between torque and stator flux linkage
可看出圖3中的L3段與L2段相交于B點,即MTPV曲線與電流限制圓的交點,與圖2對應。可發(fā)現(xiàn)在相同的定子磁鏈條件下L3段的轉(zhuǎn)矩大于L2段,說明如在B點之后選擇MTPV算法,則可在滿足電壓電流限制條件下輸出更大的轉(zhuǎn)矩。
1.4 轉(zhuǎn)矩角
PMSM電磁轉(zhuǎn)矩方程可用定、轉(zhuǎn)子磁鏈的關系表示為

其中,δ為轉(zhuǎn)矩角,即定、轉(zhuǎn)子磁鏈矢量間的夾角。對式(18)求導得


在PMSM DTC系統(tǒng)中,當δ<δm時轉(zhuǎn)矩值將隨轉(zhuǎn)矩角的增大而增大,當δ=δm時轉(zhuǎn)矩達最大;而當δ>δm時轉(zhuǎn)矩值將隨著δ的增大而減小,最終將會導致轉(zhuǎn)矩關系不平衡而使電機運行失步。因此弱磁控制時為保證系統(tǒng)運行穩(wěn)定必須保持δ≤δm。
根據(jù)式(18)可知,Te、ψs、δ 3者中只有2個獨立,因此在已知MTPA-CPSR-MTPV 3個階段中Te隨ψs變化軌跡的前提下,可繪制出δ隨ψs變化的軌跡,如圖4所示。圖中L1段為MTPA,L2段為CPSR,L3段為MTPV。同時由式(20)還可得到最大轉(zhuǎn)矩角δm隨ψs變化的關系,如圖4中L4段所示。
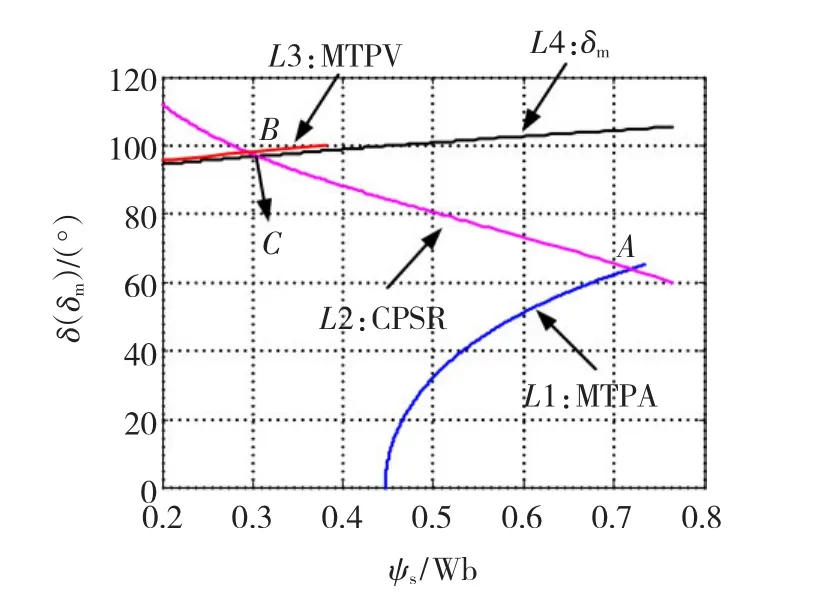
圖4 轉(zhuǎn)矩角(最大轉(zhuǎn)矩角)-定子磁錠關系圖Fig.4 Relationship between torque angle(maximum torque angle)and stator flux linkage
由圖4可知,在整個MTPA階段δ均小于δm;在CPSR階段隨著轉(zhuǎn)速的不斷上升ψs逐漸減小,δ隨之增大,而 δm隨之減小。在 ψs=0.306 Wb,δm=96.97°的C點,δ等于 δm,C點之后 δ超過 δm導致CPSR運行區(qū)域出現(xiàn)不穩(wěn)定。而在MTPV整個階段的轉(zhuǎn)矩角δ始終大于最大轉(zhuǎn)矩角δm,無法穩(wěn)定運行。因此為了使PMSM DTC系統(tǒng)速度運行范圍得到拓展,必須進行必要的改進。
2 PMSM SVM-DTC弱磁運行的實現(xiàn)
傳統(tǒng)PMSM SVM-DTC的結(jié)構(gòu)框圖如圖5所示[2]。其中,轉(zhuǎn)矩與定子磁鏈給定值計算模塊如圖6所示。當ω <ωb,輸出轉(zhuǎn)矩最大值為圖3中A點所對應的轉(zhuǎn)矩。而當ω>ωb之后,受制于電壓極限,轉(zhuǎn)矩將無法維持該最大值。根據(jù)圖3,CPSR運行階段每一轉(zhuǎn)速將對應一個最大輸出轉(zhuǎn)矩,且其值隨轉(zhuǎn)速的升高而降低。據(jù)此可制定出一個最大轉(zhuǎn)矩-轉(zhuǎn)速查詢表Temax=f(ω),以對通過轉(zhuǎn)速PI調(diào)節(jié)器獲得的初始轉(zhuǎn)矩給定T'e實現(xiàn)限幅,獲得最終的轉(zhuǎn)矩給定值。
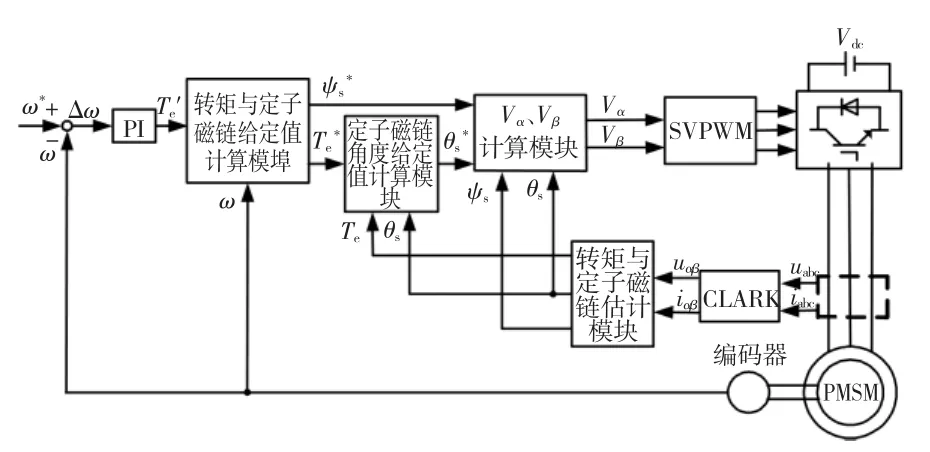
圖5 傳統(tǒng)永磁同步電機直接轉(zhuǎn)矩控制結(jié)構(gòu)框圖Fig.5 Block diagram of SVM DTC for PMSM
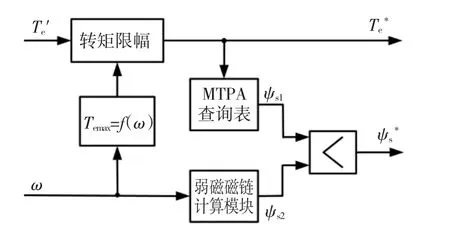
圖6 轉(zhuǎn)矩與定子磁鏈給定值計算模塊Fig.6 Calculator of reference torque andstator flux linkage
當ω<ωb時電機按MTPA軌跡運行,此時可根據(jù)轉(zhuǎn)矩與定子磁鏈的對應關系,通過查詢MTPA表格獲得轉(zhuǎn)矩給定下所對應的定子磁鏈ψs1。而當ω> ωb之后為滿足電壓極限要求,根據(jù)ψs2=Umax/ω關系,定子磁鏈需隨轉(zhuǎn)速的增大而減小。通常在低速時ψs1小于ψs2,高速時ψs1大于ψs2,此時可通過對ψs1和ψs2的比較,取小值作為定子磁鏈的實際給定幅值。
由式(18)可知,在定子磁鏈幅值一定的情況下電磁轉(zhuǎn)矩主要由轉(zhuǎn)矩角來決定。因此可利用PI調(diào)節(jié)器將轉(zhuǎn)矩的誤差反映到轉(zhuǎn)矩角的變化上,繼而通過改變定子磁鏈相對于α軸的夾角來改變參考電壓空間矢量的給定值,實現(xiàn)對轉(zhuǎn)矩的有效控制。圖7即為定子磁鏈角度給定值計算模塊。
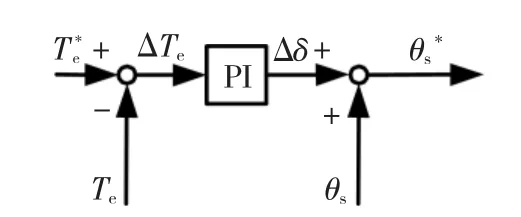
圖7 定子磁鏈角度給定值計算模塊Fig.7 Calculator of reference stator flux linkage angle
3 轉(zhuǎn)矩角限幅方法
在基速以上,隨著轉(zhuǎn)速的上升定子磁鏈減小,由圖4可見,最大轉(zhuǎn)矩角也變小;但按CPSR算法求得的轉(zhuǎn)矩角卻隨轉(zhuǎn)速增加而增大。為了保證作為DTC穩(wěn)定運行依據(jù)的PMSM轉(zhuǎn)矩角和轉(zhuǎn)矩之間的正比例關系,滿足δ≤δm的穩(wěn)定運行條件,必須對轉(zhuǎn)矩角實施限幅。通過對圖5的觀察發(fā)現(xiàn),MTPV階段的δ略大于δm且與δm非常接近,因此可以在C點之后通過對δ進行限幅而實現(xiàn)類MTPA算法下的高速運行。考慮到傳統(tǒng)PMSM SVM-DTC中沒有對轉(zhuǎn)矩角進行直接觀測和控制,必須對算法進行改進。
由圖4可知,最大轉(zhuǎn)矩角δm與定子磁鏈ψs間存在一一對應關系;而在弱磁階段定子磁鏈ψs與轉(zhuǎn)速ω間同樣存在對應關系,因此可得到以查詢表表示的最大轉(zhuǎn)矩角與轉(zhuǎn)速之間的關系δm=f(ω),這樣就可根據(jù)轉(zhuǎn)速ω來確定允許的最大轉(zhuǎn)矩角δm,實現(xiàn)δ限幅控制。
圖8為基于轉(zhuǎn)矩角限幅的定子磁鏈角度給定值計算框圖。在通過傳統(tǒng)算法得到定子磁鏈矢量初始給定相對于α軸的夾角θ's后,與電機轉(zhuǎn)速ω積分求得的轉(zhuǎn)子位置角θe比較,得到給定轉(zhuǎn)矩角δ。再通過查表得到允許最大轉(zhuǎn)矩角δm,實現(xiàn)對給定轉(zhuǎn)矩角限幅,按此從轉(zhuǎn)矩的限制角度保證滿足穩(wěn)定運行條件。最后將經(jīng)限幅后的給定轉(zhuǎn)矩角與轉(zhuǎn)子位置角θe相加,即可作為給定定子磁鏈相對于α軸的夾角給定值。
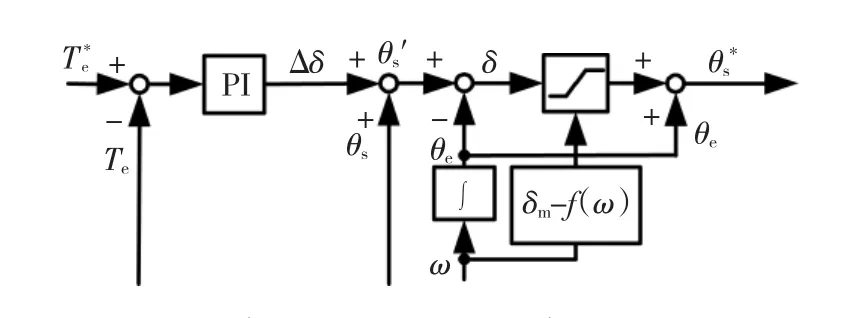
圖8 基于轉(zhuǎn)矩角限幅的定子磁鏈角度給定值計算框圖Fig.8 Calculation diagram of reference stator flux linkage angle based on torque angle limitation
上述分析表明,通過轉(zhuǎn)矩角限幅之后的PMSM SVM-DTC可在高速時達到類MTPV的運行效果。可見該改進方法的優(yōu)勢是能在不過多增加運算復雜性的前提下,通過對電機轉(zhuǎn)矩角的有效處理,保證電機的高速穩(wěn)定運行,同時實現(xiàn)了最大轉(zhuǎn)矩輸出。但其運行特征與MTPV算法相似,即在轉(zhuǎn)速逐漸上升時保持電機端電壓最大,電流幅值隨之減小。
4 改進給定轉(zhuǎn)矩計算方法
在傳統(tǒng)PMSM的SVM-DTC弱磁運行中,轉(zhuǎn)矩限幅值是根據(jù)Temax=f(ω)關系通過查表獲得,而該表的建立對交、直軸電感Ld、Lq和永磁體磁鏈ψf等電機參數(shù)的依賴較大,系統(tǒng)魯棒性較差。同樣,基于轉(zhuǎn)矩角限幅的改進策略中也需要用到Temax=f(ω)關系,同樣也需依賴精確的電機參數(shù)。對此本文進一步提出一種基于定子磁鏈定向、對電機參數(shù)依賴性小的改進轉(zhuǎn)矩給定方法,其算法如圖9所示。
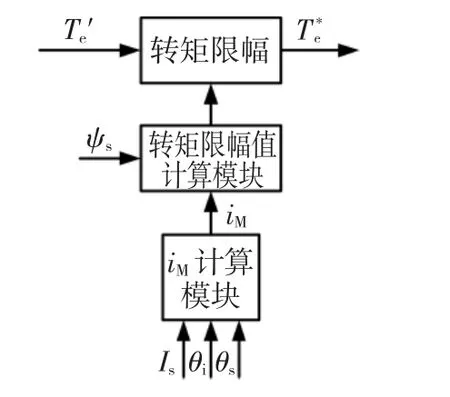
圖9 給定轉(zhuǎn)矩改進方法Fig.9 Modified algorithm of reference torque
定子磁鏈定向即將同步速旋轉(zhuǎn)的M-T坐標系的M軸定在定子磁鏈矢量方向上,如圖1中所示。此時有定子磁鏈M軸分量ψM=ψs,T軸分量ψT=0。
這樣定子磁鏈定向下電磁轉(zhuǎn)矩方程可表示為

其中,iM、iT分別為定子電流的M軸和T軸分量。
在M-T坐標系下,轉(zhuǎn)矩限幅值可表示為

其中,iTmax為下式計算得T軸電流的最大值,可表示為

其中,定子電流M軸分量iM為

其中:θi為定子電流矢量Is相對于α軸的夾角;θs為定子磁鏈矢量ψs相對于α軸的夾角,如圖1所示。
利用轉(zhuǎn)矩限幅值Telim對轉(zhuǎn)速PI調(diào)節(jié)器的輸出T'e實施限幅,即可得到改進的給定轉(zhuǎn)矩T*e。
上述改進轉(zhuǎn)矩給定算法,利用定子磁鏈與定子電流在定子磁場方向上分量的乘積獲得轉(zhuǎn)矩限幅值,能夠?qū)崟r地根據(jù)系統(tǒng)的實際運行狀態(tài)計算轉(zhuǎn)矩限幅值,不再需要保持轉(zhuǎn)矩角和轉(zhuǎn)矩之間的嚴格正比例的關系,因此轉(zhuǎn)矩角無需維持在最大轉(zhuǎn)矩角范圍內(nèi),就可實現(xiàn)高速穩(wěn)定運行。而且由于改進算法中轉(zhuǎn)矩限幅值與交、直軸電感和轉(zhuǎn)子永磁體磁鏈沒有直接聯(lián)系,因此對電機參數(shù)依賴小,魯棒性強。
5 仿真研究
為驗證上述分析和改進方法的正確性,針對一內(nèi)嵌式PMSM進行了基于Matlab/SIMULINK的仿真研究,電機參數(shù)如下:極對數(shù)為2,定子電壓18.6 Ω,直軸電感0.388 5 H,交軸電感0.475 5 H,永磁磁鏈0.447 Wb,最大定子電壓240 V,最大定子電流1.4 A,額定轉(zhuǎn)矩1.94 N·m。運行條件為空載啟動至轉(zhuǎn)速6 000 r/min,。圖10~圖12分別是PMSM基于傳統(tǒng)SVM-DTC、轉(zhuǎn)矩角限幅SVM-DTC和給定轉(zhuǎn)矩改進SVM-DTC的運行特性。
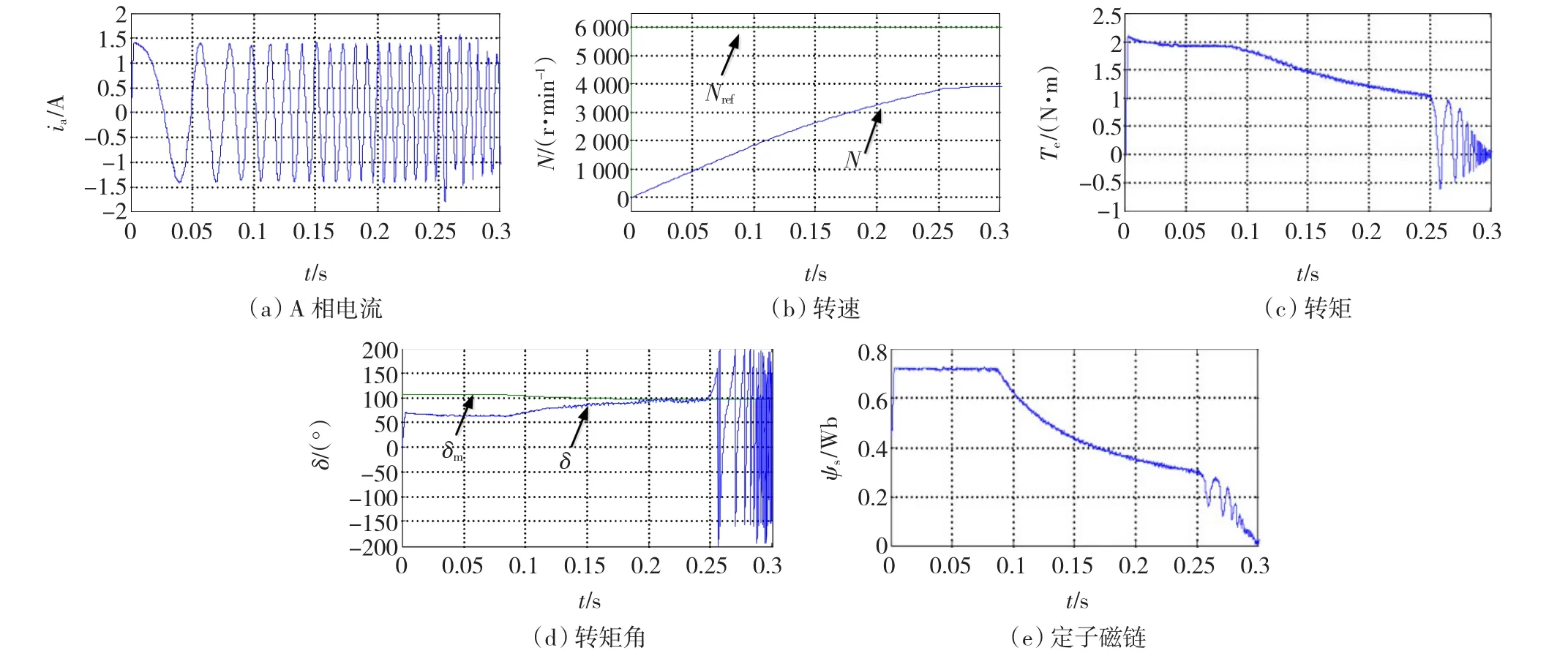
圖10 傳統(tǒng)PMSM SVM-DTCFig.10 Conventional PMSM SVM-DTC
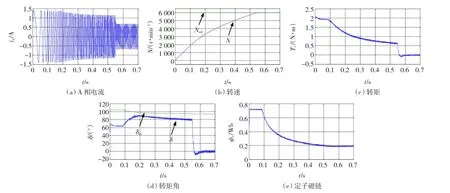
圖11 轉(zhuǎn)矩角限幅PMSM SVM-DTCFig.11 PMSM SVM-DTC based on torque angle limitation
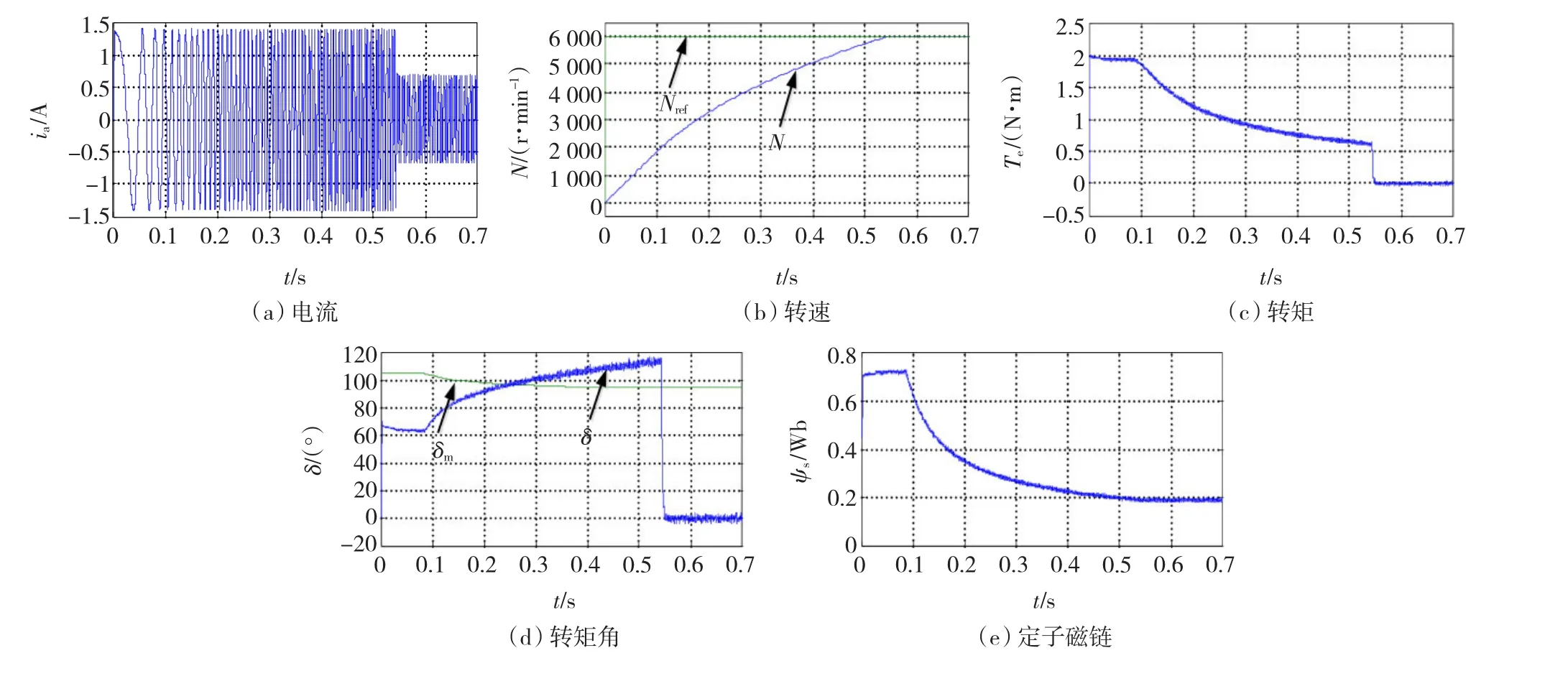
圖12 給定轉(zhuǎn)矩改進PMSM SVM-DTC Fig.12 PMSM SVM-DTC based on modified reference torque algorithm
由圖10可知,在t=0.25 s之前,基于傳統(tǒng)SVMDTC的PMSM運行穩(wěn)定,電流保持最大幅值,轉(zhuǎn)速平穩(wěn)升高。升速過程中轉(zhuǎn)矩角一直小于最大轉(zhuǎn)矩角,基速以上磁鏈開始變小。在t=0.25 s之后電流開始波動,轉(zhuǎn)矩和轉(zhuǎn)矩角振蕩劇烈,磁鏈也在波動。表明此時轉(zhuǎn)矩角已超過了最大轉(zhuǎn)矩角,導致電機運行失步。
圖11波形表明,基于轉(zhuǎn)矩角限幅SVM-DTC的PMSM系統(tǒng),在轉(zhuǎn)矩角達到最大轉(zhuǎn)矩角之前,轉(zhuǎn)速不斷上升,轉(zhuǎn)矩角不斷增大,電流幅值維持為最大幅值;而在轉(zhuǎn)矩角接近最大轉(zhuǎn)矩角時,由于受到轉(zhuǎn)矩角限幅控制,轉(zhuǎn)矩角變化趨緩,與圖4所示的最大轉(zhuǎn)矩角的變化規(guī)律一致,最終在轉(zhuǎn)速達到給定值之后轉(zhuǎn)矩角降至零。當轉(zhuǎn)矩角隨最大轉(zhuǎn)矩角的限制逐漸減小時,電流的幅值隨之減小,與MPTV階段的運行階段特性相似。從圖中可發(fā)現(xiàn),實際轉(zhuǎn)矩角開始減小的時刻在t=0.2 s,而此時實際轉(zhuǎn)矩角尚未達到最大轉(zhuǎn)矩角。這是因為實施限幅的對象是給定轉(zhuǎn)矩角,而非實際轉(zhuǎn)矩角,故其開始限幅的時刻主要由轉(zhuǎn)矩PI控制器的輸出決定,從而導致實際轉(zhuǎn)矩角的提早減小。同時可看出,由于是轉(zhuǎn)矩角開環(huán)控制,實際轉(zhuǎn)矩角與最大轉(zhuǎn)矩角之間存在一定差值,即實際轉(zhuǎn)矩角的軌跡不是最大轉(zhuǎn)矩角的軌跡。
由圖12可看出,基于給定轉(zhuǎn)矩改進SVM-DTC的PMSM系統(tǒng),隨著轉(zhuǎn)速的升高,轉(zhuǎn)矩角不斷增大。同時A相電流幅值始終保持最大,表明此方法充分利用了電機極限容量。而且當轉(zhuǎn)矩角超過最大轉(zhuǎn)矩角之后,系統(tǒng)依然穩(wěn)定運行。
6 結(jié)論
1)系統(tǒng)地分析了PMSM基于MTPA、CPSR和MTPV 3種算法的特點以及轉(zhuǎn)矩角的情況,總結(jié)出DTC方式下PMSM弱磁高速運行時轉(zhuǎn)矩角超過其最大值是系統(tǒng)失穩(wěn)的關鍵。
2)提出了基于轉(zhuǎn)矩角限幅的DTC方法,可有效限制轉(zhuǎn)矩角,使得PMSM能在轉(zhuǎn)矩角限幅階段運行于類MTPV算法,獲得最大轉(zhuǎn)矩,確保PMSM高速運行時的穩(wěn)定性。
3)提出了基于轉(zhuǎn)矩給定改進計算方法的DTC策略,能有效提高系統(tǒng)的參數(shù)魯棒性,實現(xiàn)同時滿足電流和電壓限幅狀態(tài)下的高速穩(wěn)定運行,更有效地拓寬了PMSM的高速運行范圍。
4)兩種方法均可保持PMSM DTC系統(tǒng)優(yōu)異的動態(tài)性能,且計算方便。
[1]ZHONG L,RAHMAN M F,HU W Y,et al.Analysis of direct torque control in permanent magnet synchronous motor drives[J].IEEE Transactions on Power Electronics,1997,12(3):528-536.
[2]TANG L X,ZHONG L,RAHMAN M F,et al.A novel direct torque controlled interior permanent magnet synchronous machine drive with low ripple in flux and torque and fixed switching frequency[J].IEEE Transactions on Power Electronics,2004,19(2):346-354.
[3]孫丹,賀益康.基于恒定開關頻率空間矢量調(diào)制的永磁同步電機直接轉(zhuǎn)矩控制[J].中國電機工程學報,2005,25(12):112-116.
SUN Dan,HE Yikang.Space vector modulated based constant switching frequency direct torque control for PMSM[J].Proceedings of the CSEE,2005,25(12):112-116.
[4]裘君,趙光宙.永磁同步電機磁鏈自適應控制[J].電機與控制學報,2009,13(6):798-803,810.
QIU Jun,ZHAO Guangzhou.Flux adaptive control of PMSM[J].Electric Machines and Control,2009,13(6):798-803,810.
[5]賈洪平,孫丹,賀益康.基于滑模變結(jié)構(gòu)的永磁同步電機直接轉(zhuǎn)矩控制[J].中國電機工程學報,2006,26(20):134-138.
JIA Hongping,SUN Dan,HE Yikang.The PMSM DTC based on variable structure sliding mode[J].Proceedings of the CSEE,2006,26(20):134-138.
[6]萬健如,宮成,劉暐,等.基于MTPA的永磁同步電機滑模變結(jié)構(gòu)直接轉(zhuǎn)矩控制[J].電機與控制學報,2012,16(3):30-35.
WAN Jianru,GONG Cheng,LIU Wei,et al.Sliding mode variable structure control of permanent magnet synchronous machine based on MTPA[J].Electric Machines and Control,2012,16(3):30-35.
[7]KWANG Woon Lee,SANG Bin Lee.MTPA operation point tracking control scheme for vector controlled PMSM drives[C]//International Symposium on Power Electronics Electrical Drives Automation and Motion(SPEEDAM),June 14-16,2010,Pisa.2010:24-28.
[8]MORIMOTO S,TAKEDA Y,HIRASA T,et al.Expansion of operating limits for permanent magnet motor by current vector control considering inverter capacity[J].IEEE Transactions on Industry Applications,1990,26(5):866-871.
[9]RAHMAN M F,ZHONG L,KHIANG W L.A direct torque-controlled interior permanent magnet synchronous motor drive incorporating field weakening[J].IEEE Transactions on Industry Applications,1998,34(6):1246-1253.
[10]竇汝振,溫旭輝.永磁同步電動機直接轉(zhuǎn)矩控制的弱磁運行分析[J].中國電機工程學報,2005,25(12):117-121.
DOU Ruzhen,WEN Xuhui.Analysis of field weakening operation for the direct torque control of PMSM[J].Proceedings of the CSEE,2005,25(12):112-116.
[11]INOUE Y,MORIMOTO S,SANADA M.A novel method of maximum-power operation for IPMSMs in DTC system[C]//13th European Conference on Power Electronics and Applications,September 8-10,2009,Barcelona.2009:1-10.
[12]INOUE Y,MORIMOTO S,SANADA M.Control method suitable for direct-torque-control-based motor drive system satisfying voltage and current limitations[J].IEEE Transactions on Industry Applications,2012,48(3):970-976.