(準)Z源逆變器直流鏈電壓直接控制策略
2014-10-10 09:45:04魏文健丁新平
制造業自動化 2014年3期
關鍵詞:檢測
秦 臻,鐘 韜,魏文健,丁新平
QIN Zhen,ZHONG Tao,WEI Wen-jian,DING Xin-ping
(青島理工大學 自動化工程學院,青島 266520)
0 引言
Z源逆變器和準Z源逆變器因具有以下特性而受到業界的廣泛關注[1,2]。1)可以輸出需要的交流電壓值。2)提高了逆變器的可靠性,因為在直通狀態下由于Z源逆變器的特殊結構使電磁干擾引起的噪聲不再對逆變器產生損壞,確保逆變器穩定工作。圖1所示為Z源逆變器和準Z源逆變器的電路結構,其工作原理已經在文獻[1]和[2]中有詳細論述。
雖然Z源逆變器和準Z源逆變器在電壓跟蹤檢測和干擾抑制等方面都取得了很好效果,但是(準)Z源逆變器對直流鏈電壓的反饋控制技術仍然存在一些局限性。在直流鏈升壓控制方面,Z源逆變器和準Z源逆變器幾乎相同,都是通過控制直通占空比以實現直流鏈電壓的升壓功能。
傳統的直流鏈電壓采用的是間接控制技術。由于直流鏈電壓Vdc在直通狀態下是以方波形式存在的,而這種形式的電壓難以直接檢測和控制,所以采用了檢測電容電壓VC用來控制直流鏈電壓Vdc的控制方式(被稱為直流鏈電壓的間接控制),通過控制直通占空比D0可以保持VC恒定從而達到控制直流鏈電壓Vdc的目的,然而這樣通過占空比間接控制直流鏈電壓的方法無法使直流鏈電壓得到有效的控制,其變化關系如圖3所示。該變化效應增加開關管的電壓應力,可能對逆變器的輸出電壓產生影響,導致輸出電壓畸變。而直接調制直通占空比的傳遞函數D0/Vm不能直接獲得,這就增加了補償器設計的難度還惡化了直流鏈電壓的瞬態響應。
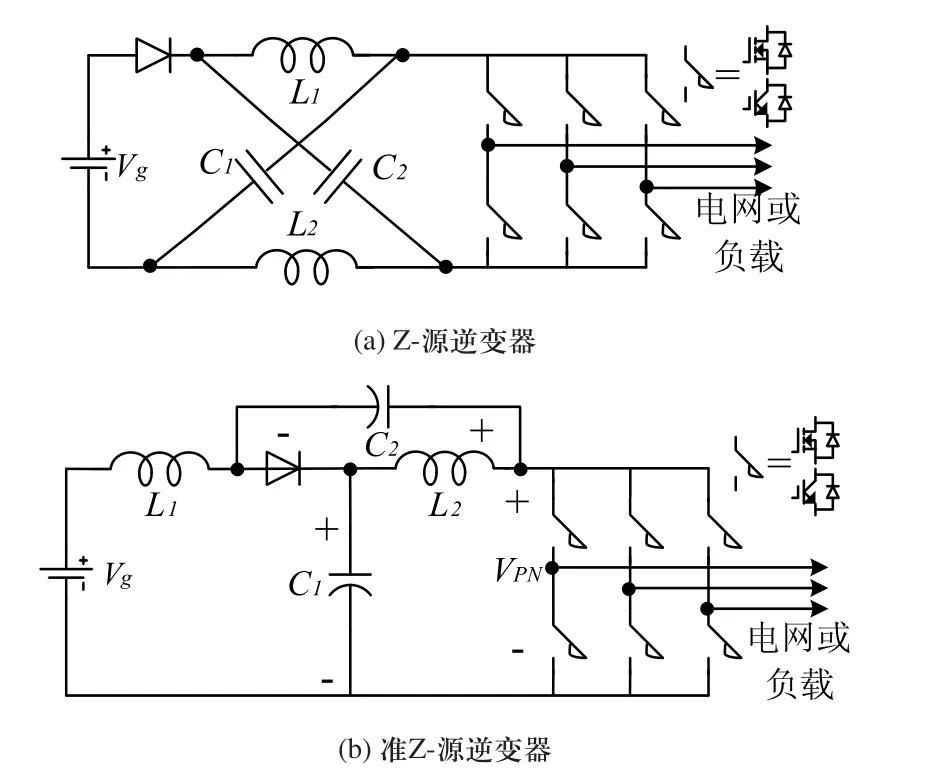
圖1 阻抗源逆變器
本文提出了一種新型控制策略,該策略同時適合于Z源逆變器和準Z源逆變器的直流鏈電壓進行調控。本文詳細介紹了這種檢測電路在直流鏈電壓最大值檢測以及信號反饋中的工作原理。提出了這種直接控制直流鏈電壓的控制器理念,并基于小信號模型設計了直流鏈電壓最大值直接反饋控制器。它提高了瞬態響應和抗干擾能力,并簡化了控制器的設計。
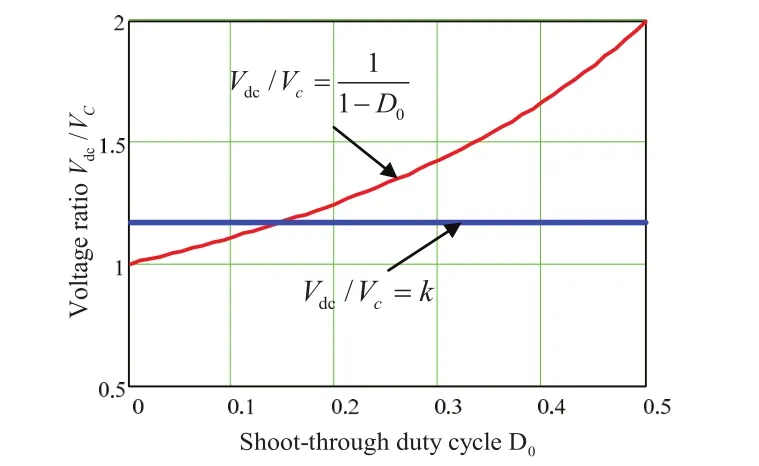
圖2 Vdc/Vc與D0之間的非線性關系圖
1 直流鏈電壓最大值直接控制策略
1.1 直流鏈電壓檢測電路
由于直通狀態使得直流鏈電壓Vdc以方波形式存在,如圖3所示。在非直通狀態下,直流鏈電壓Vdc為其峰值,而在直通狀態下其值為零,這樣直流鏈電壓Vdc就不能保持恒定,而在(準)Z-源逆變器中要直接控制直流鏈電壓Vdc,對這種方波形式的電壓檢測就變得尤為重要。
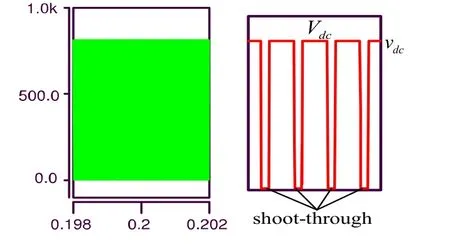
圖3 直通狀態引起的直流鏈方波電壓
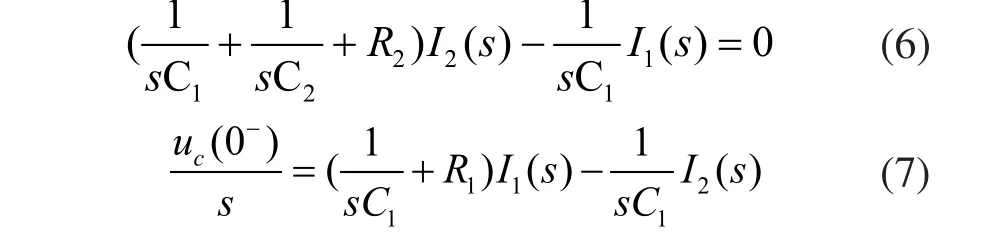
圖4(a)所示為這種方波電壓檢測電路,可以應用于Z源逆變器和準Z源逆變器中,本文以Z源逆變器為例。當Z源逆變器工作在其非直通狀態,直流鏈電壓Vdc通過二極管D和電阻R2為電容器C1和C2充電,而在直通狀態,電容器C1和C2則通過R1和R2緩慢放電,而放電的時間間隔是取決于整個電路的元件參數值。根據式子還必須確定電容C2充放電時間,以及充放電的時間常數。在充電期間,S域內的檢測電路示意圖如圖4(a)所示,根據網孔電路法則,按照圖8中環路電流I1和I2為順時針方向,根據基爾霍夫電壓定律,我們可以得到以下兩個方程:
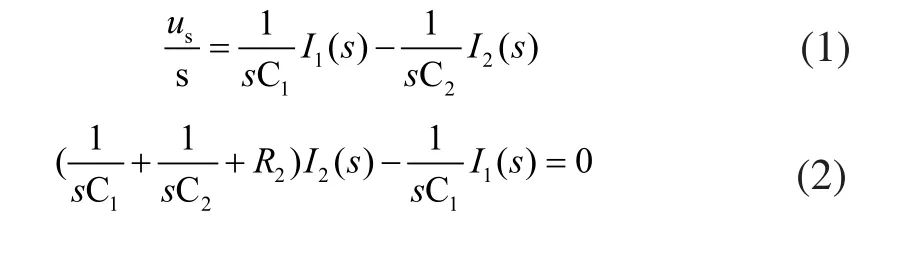
由(1)和(2)可得:

因此,電容器C2的響應電壓可表示為:

在時域中,可化為:

其中,τ2是充電間隔的時間常數。
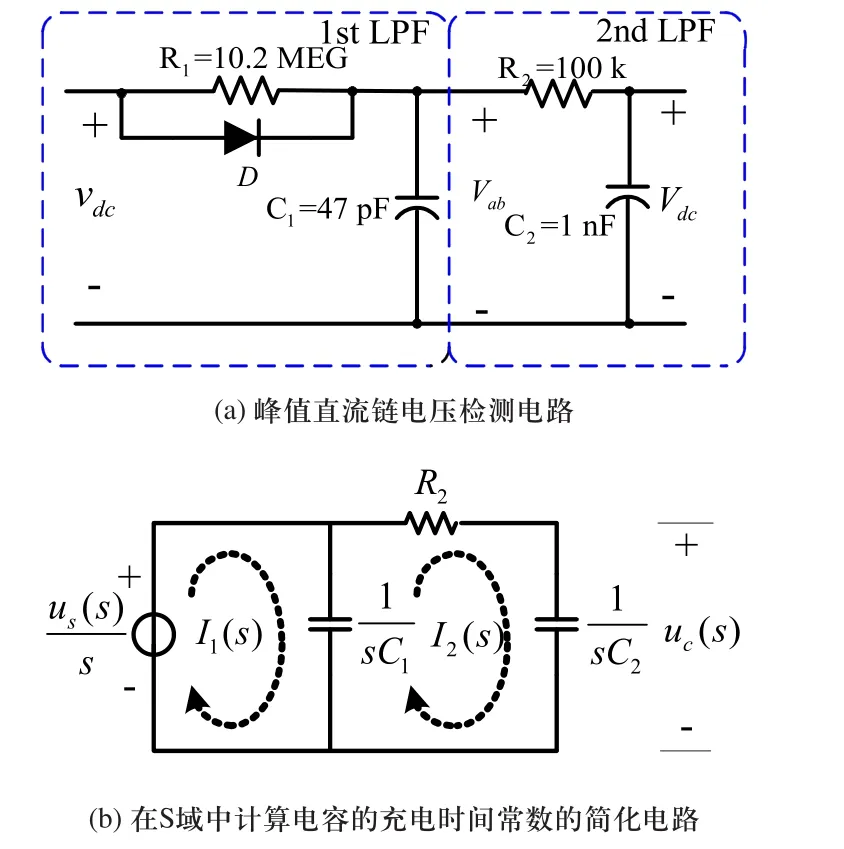
圖4 直流鏈電壓最大值檢測電路
當直流鏈電壓降低時,電容器C1和C2放電。在臨界條件下,直流鏈電壓降低為零,檢測電路簡化為如圖4(b)所示。電流I1和I2為逆時針方向,根據網孔電流法和基爾霍夫電壓定律,我們得到:
由式(6)和式(7)可得:
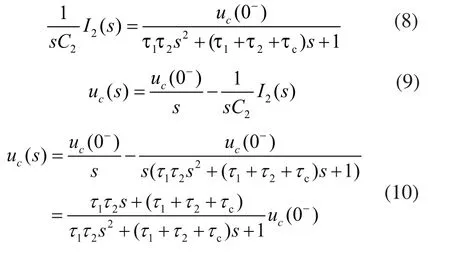
其中τ1=R1C1,τ2=R2C2, τc=R1C2, Uc(0-)是電容C2電壓的初始值。我們定義τ1τ2=a,τ1+τ2+τc=b,這樣在S域內的電容C2電壓可以表示為:
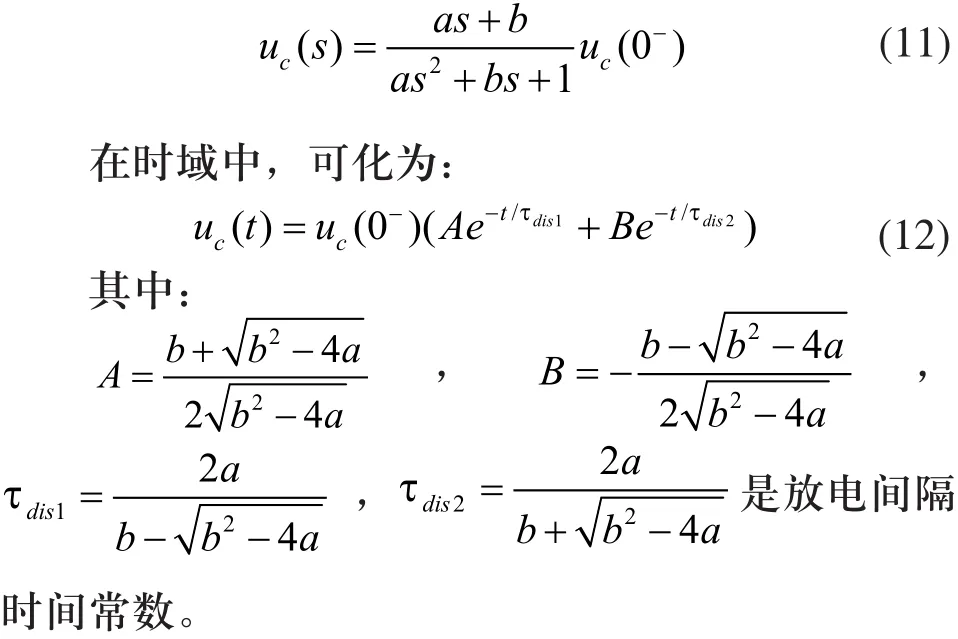
基于表1所示的元件特性繪制的電容C2兩端電壓隨時間t變化的電壓曲線,如圖5所示。
可以很明顯的看出檢測電路所具有的特性,它具有很小的充電時間常數τ2=R2C2=91us,小于開關周期Ts=100us,與直通間隔τshoot-through=10ns相比具有更大的放電時間常數τdis2==10ms。因此,只要選擇合適參數的元件,就可以獲得消除零電壓情況的直流鏈電壓Vdc,從而檢測到連續的直流鏈電壓Vdc。
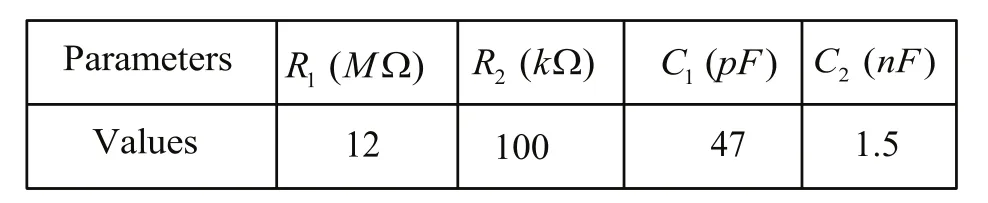
表1 檢測電路元件參數

圖5 充放電間隔時間常數
1.2 直流鏈電壓最大值直接控制器設計
在本文中,提出了一種PID補償器控制器,如圖6所示。在[3]中對傳遞函數Vdc/D0不可直接獲得做了詳細的說明,這使控制器的設計變得困難。但是,直流鏈電壓的控制信號使得電感電壓VL不能突變。因此,直流鏈電壓控制的傳遞函數可以簡化為:

其中Gvd(s)是控制電容電壓的傳遞函數,V11=2Vc-Vin-RIin,I11=2IL-Iin。圖7所示系統的環路增益可表示為:

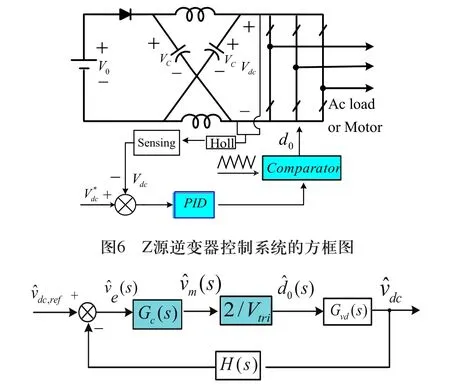
圖7 系統框圖
在表2所示的參數下,未補償的環路增益交叉頻率為fc=230Hz,相位裕度小于10度,圖8所示。為了提高相位裕度(穩定性)以及延長反饋回路的帶寬(瞬態響應),就需要一個差分補償,因此,在本文中,提出了這種PID補償控制器,其傳遞函數可表示為:
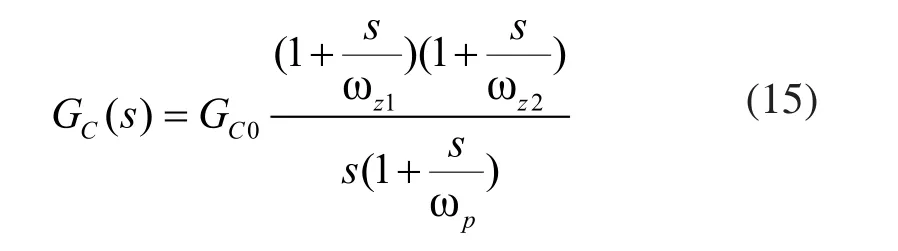
所設計的這種補償器,交叉頻率為fc=1kHz,或者為其開關頻率的十分之一,頻率fz的選擇要比頻率fc足夠的小,這樣就可以保持足夠的相位裕度。為了盡快得到頻率補償器的超前相位,極點和零點的頻率應按照如下方式選擇:

取fc=1kHz,θ=61°通過計算可以得到補償器極點和零點頻率為fl=267Hz,fp=3.31kHz。這樣就可以得到如圖6所示的PID控制器,圖12表示的就是這種帶有直接控制直流鏈電壓PID控制器的補償環路增益。可以很清楚的看出θφ=61°交叉頻率fc=1kHz這樣就可以保持足夠的相位裕度使系統穩定。
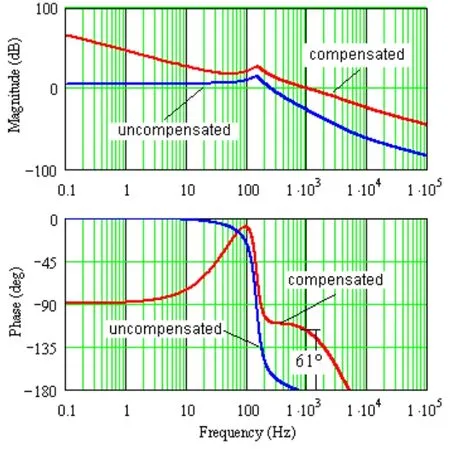
圖8 回路增益的幅值和相位的漸近線。
2 實驗研究
通過實驗結果,證實了直接控制直流鏈電壓PID控制器工作原理的可行性,其系統參數如表2所示。圖9(a)~(c)所示的是輸入電壓突然變化(電壓驟降),從額定電壓(510V)驟變到460 V的情況。在所設計的控制器作用下,直流鏈電壓最大值保持恒定,抑制了電網電壓跌落的影響。輸出交流電壓保持恒定,幾乎沒有收電壓跌落的影響,控制器性能優良。電容電壓有所跌落,符合理論分析結果。圖9(d)所示為系統對負載擾動的抑制作用,在負載從60?變到30?后,輸出電壓基本保持恒定,沒有受到什么影響。
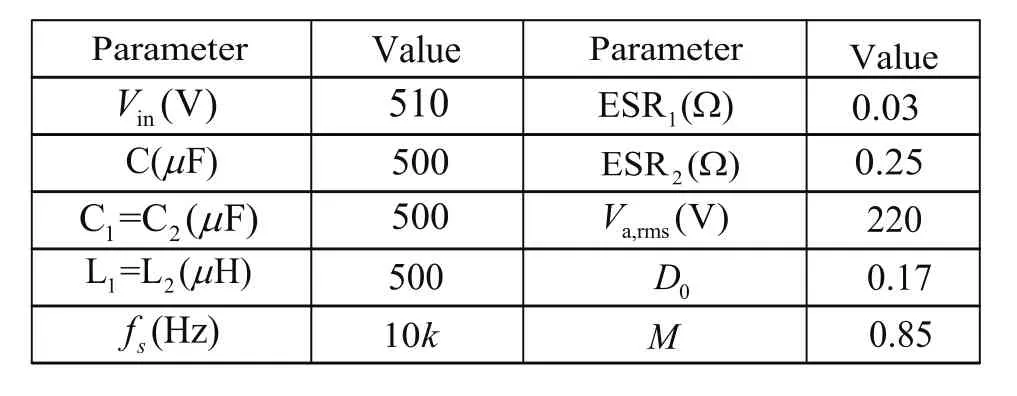
表2 實驗時的系統參數
擾動的抑制作用使輸入電壓驟降時直流鏈電壓幾乎保持恒定。帶有這種新型PID控制器的Z源逆變器與間接直流鏈電壓控制器相比對電壓驟降具有很好的過度能力,同時還具有很好的動態響應。
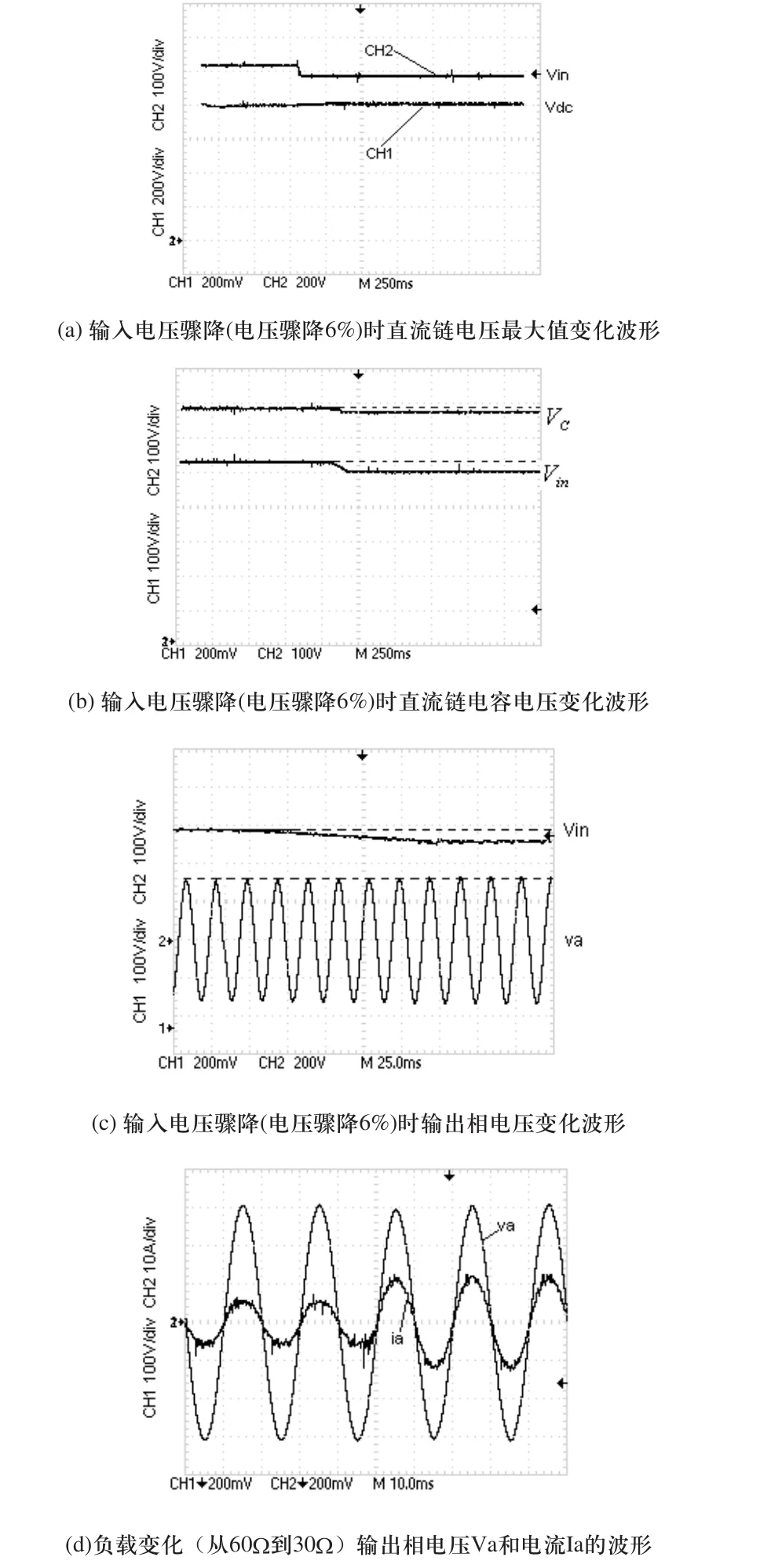
圖9 實驗波形
3 結論
在Z-源逆變器中直接對直流鏈電壓檢測的PID補償控制器可實現其控制功能。使用這種技術的直流鏈電壓具有出色的瞬態性能,并增強了抑制干擾的能力(包括對輸入電壓紋波和負載電流的變化帶來的干擾),同時對電壓驟降具有良好承受能力。系統在所設計控制器的作用下,改善了直流鏈電壓的瞬態響應,并減少了開關管的電壓應力。文中提出的方法已經在10kW的樣機上進行了驗證,實驗結果與理論分析的結果相一致。
[1]F. Z. Peng.Z-Source Inverter.IEEE Transaction on Industry Application,2003,39(2):504-510.
[2]J.Anderson,F.Z.Peng.Four Quasi-Z-source inverters.in Proc. IEEE PESC’08, Rhodes, Greece,June 2008.
[3]P. C. Loh, D, M.Vilathgamuwa,C.J.Gajanayake, Y. R.Lim and C. W. Teo.Transient Modeling and Analysis of Pulse-Width Modulated Z-Source inverter. IEEE IAS 2005:2782-2789.
[4]Xinping Ding, Zhaoming Qian, Shuitao Yang,Bin Cui,Fangzheng Peng.A PID Control Strategy for DC-link Boost Voltage in Z-Source Inverter. Twenty-second Annual IEEE Applied Power Electronics Conference and Exposition,APEC ‘07, March 2007,APEC 07:1145-1148.
[5]田國勝,田艷兵,丁新平,張民.Z源逆變器光伏并網系統模型及電路參數設計[J].電力電子技術,2009,43(4):58-60.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
