一種懸掛物兼容飛機航電與武器總線的設計方法
2014-10-11 02:30:46陳國平張梅梅
教練機 2014年2期
任 丹,陳國平,張梅梅,江 濤,謝 暉
(中航工業洪都,江西南昌330024)
0 引言
多型飛機在設計時,對懸掛物分別采取了航電總線和武器總線的通信方式,使得某通用型懸掛物在不同型號飛機上,或掛裝于航電一級總線上,或掛裝于武器二級總線上。由于航電總線網絡中的終端采用固定通信地址,武器總線網絡中的終端采集外掛地址作為通信地址,使懸掛物與飛機的通信存在固定與浮動的通信方式,導致該通用型懸掛物不能兼容掛載多型飛機。本文針對現有情況,提出一種總線識別匹配自適應設計,通過控制運行不同通信模式軟件的方法,實現懸掛物在固定、浮動通訊地址以及不同通信協議下均能與飛機正常通信。
1 系統概述
懸掛物主控模塊是懸掛物系統正常工作的核心控制部件,用于組織管理懸掛物內部設備,負責與飛機總線通信。懸掛物主控模塊與飛機的通信是通過其內部的MBI模塊實現。MBI模塊采用由軟件設置好的固定通信地址實現與飛機航電總線的通信。若要實現懸掛物與飛機武器總線的通信,需對懸掛物主控模塊的MBI模塊進行改進,使其兼容硬件設置的通信地址,以實現與飛機的通信。
主控模塊內部有兩套軟件,分別是主控模塊系統軟件和懸掛物系統任務軟件。主控模塊系統軟件是為主控模塊所開發的嵌入式實時操作系統及配置的開發環境,提供實時運行軟件、軟件開發和系統維護平臺。懸掛物系統任務軟件是為懸掛物主控模塊開發實時任務程序,在硬件平臺、實時多任務操作系統以及硬件驅動程序的基礎上,實現與飛機系統之間的數據交換,控制懸掛物內各設備有序工作,其內部模塊見圖1。
其中初始化模塊負責對各類接口的初始化和工作啟動,以及對軟件全局數據變量的初始化;軟件主控模塊負責對25ms周期任務和40ms周期任務的處理,并調用其他模塊;GJB289A總線通信模塊、RS422總線通信模塊、數據分析解算和組織模塊、數據記錄模塊、BIT管理和故障分析組織模塊負責懸掛物系統與飛機以及懸掛物系統內部的通信、數據記錄、故障分析組織等功能。懸掛物系統任務軟件工作流程見圖2。
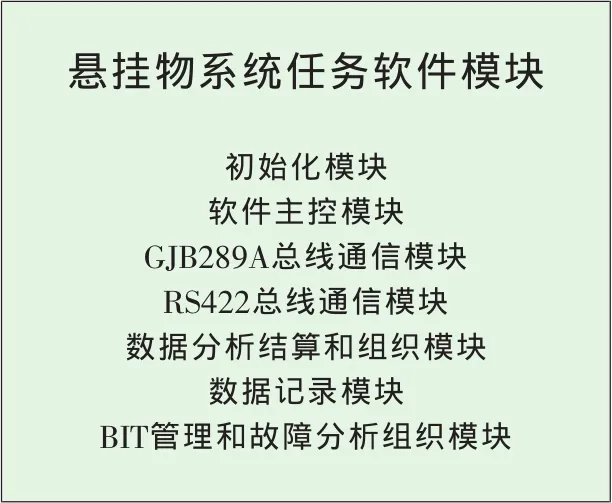
圖1 懸掛物系統任務軟件模塊
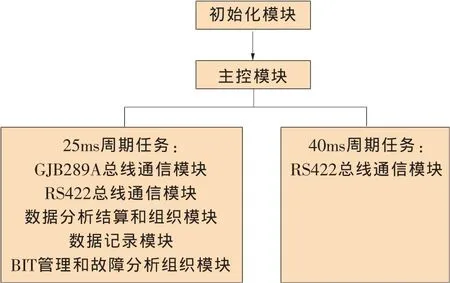
圖2 軟件工作流程
2 通用性設計方法
懸掛物在兩種總線掛裝方式下與飛機的通信協議(包括:ICD、通信表等)存在差別[1],使得懸掛物系統任務軟件的設計需同時考慮兩套通信協議,掛裝不同的總線,任務軟件執行相應的通信代碼。由于任務軟件無法識別懸掛物掛裝飛機的總線類型,在主控模塊面板上增加一路離散量開關,通過硬件產生相應的信號供軟件識別,軟件根據收到的離散量值,執行對應的通信代碼,即可實現懸掛物與兩級總線的通信[2]。離散量開關的設計要求可直觀看到當前開關的狀態,且外部人員不易對開關進行誤操作。
為實現懸掛物與飛機兩級總線的通信,對懸掛物主控模塊機械結構、多路傳輸總線接口MBI模塊和系統任務軟件進行設計改進。
2.1 機械結構改進設計
主控模塊中包含8路離散量輸入,系統只應用了第0、1、2路。在主控模塊面板上增加一路開關,用于控制模塊中的8路離散量輸入中的第3路。所選擇的開關為單刀雙擲紐子開關,具備防誤操作、防水等功能。開關打到上位“固定”位置時,懸掛物掛裝航電總線,通信地址采用固定RT地址;開關打到下位“浮動”位置時,懸掛物掛裝武器總線,通信地址采用浮動RT地址。
設計改進后的主控模塊面板在原主控模塊面板的基礎上,增加一個離散量開關,其它均不作改動。
2.2 MBI模塊設計
為滿足懸掛物掛裝武器二級總線的通信要求,對原主控模塊MBI板增加一種通信地址采集方式。MBI模塊根據收到的離散量信號值,選擇通信地址采集方式。當懸掛物掛裝于航電總線時,MBI模塊采用應用軟件初始化的固定通信地址實現與飛機航電總線的通信;當懸掛物掛裝于武器總線時,MBI模塊通過采集懸掛物與飛機接口6路地址線的離散量信號,采用飛機輸入的浮動通信地址實現與飛機武器總線的通信。改進后的MBI模塊兼容硬件設置通信地址和軟件設置通信地址兩種方式。
2.3 軟件的設計
2.3.1 總線識別匹配自適應設計
為實現懸掛物在兩級總線上的正常通信,軟件增加一段代碼判斷通信地址采用固定還是浮動狀態,再依此確定懸掛物系統任務軟件的工作狀態。
輸入:主控模塊面板上的固定/浮動地址開關,用戶在懸掛物系統上電之前通過該開關量進行固定/浮動地址的選擇。
輸出:軟件工作狀態判斷,當固定/浮動地址開關值為0(低電平)時,軟件進入固定地址(航電總線)狀態;當固定/浮動地址開關值為1(高電平)時,軟件進入浮動地址(武器總線貫標)狀態。數據流圖見圖3。
2.3.2 系統任務軟件設計
為實現對新增離散量信號的采集與判斷,在原有軟件主控模塊上增加一路入口函數,以判斷當前懸掛物是掛裝于航電一級總線還是武器二級總線。由于掛裝不同級別的總線,懸掛物與其通信協議(包括ICD、通信表等)存在差別,所以在程序內部編寫兩路代碼,分別適用于不同的協議[3]。當判斷掛裝的是航電總線,程序進入適用于航電總線通信協議的程序代碼,反之進入適用于武器總線通信協議的程序代碼。軟件處理過程見圖4。
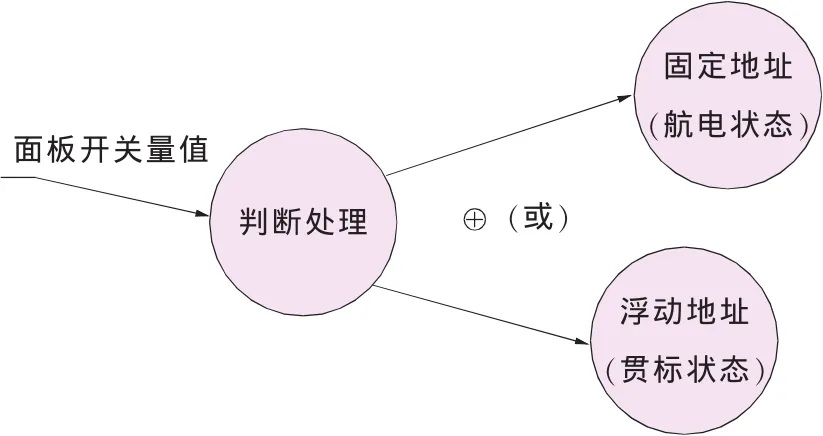
圖3 固定/浮動地址數據流圖
改進設計后的軟件可實現懸掛物與飛機兩級總線的正常通信,軟件流程見圖5。
2.3.3 初始化處理流程優化設計
懸掛物掛裝武器二級總線與飛機通信時,系統要求建立通信時間不大于500ms。這就要求懸掛物在上電500ms內,向機上武器總線發出懸掛物描述信息。
懸掛物之前掛裝于飛機航電總線,在完成系統自檢后,才上報狀態信息,建立和飛機的通信。原有軟件流程是:引導→自檢(BIT)→操作系統→應用軟件,其中MBI的初始化和啟動包含在應用軟件中,通信建立時間遠大于500ms。為實現懸掛物掛裝武器二級總線時,能夠在500ms之內向總線發送懸掛物描述信息,對懸掛物系統任務軟件進行了更改。在不影響懸掛物掛航電總線通信的前提下,增加一路軟件運行流程,最終將通信建立時間控制在500ms內,滿足了系統要求。
軟件新增加的初始化流程為:引導→MBI的初始化和啟動→BIT→操作系統→應用軟件,其中MBI初始化和啟動包含了發送懸掛物描述信息。引導程序執行時間最大為30us,MBI初始化時間最大為100ms。更改后的主控模塊上電時間流程示意圖如圖6所示,主控模塊上電 (28V有效)到復位結束時間最大為250ms,復位結束后,MBI模塊內部CPU進行初始化和自檢操作,最大需100ms;系統任務軟件對MBI進行初始化和啟動最大需100ms,其中包含發送懸掛物描述信息。綜上所述,發送懸掛物描述信息最大需要450ms,滿足了系統要求。
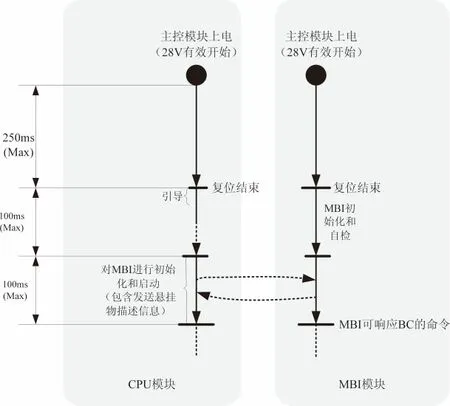
圖6 主控模塊上電時間流程示意圖
軟件流程更改后,在上電500ms內,MBI模塊具備通信能力,可將懸掛物描述信息發送到總線上。此軟件流程只適用于懸掛物配掛武器二級總線,當懸掛物配掛航電總線時,軟件流程不作更改。
3 改進后的應用情況
通信的要求,實現了一型懸掛物在多型飛機上的順利掛裝。同時,由于相應飛機無需進行改動,大大減少了掛載懸掛物帶來的工作量,并降低了協調復雜度,最大限度的擴大了懸掛物的通用化程度。該方法還可應用于國內同類設備上,提高懸掛物在不同飛機平臺掛載的通用性。
懸掛物按上述方法完成設計改進后,已分別與某A型飛機(掛裝于航電總線)和某B型飛機(掛裝于武器總線)進行了雙邊聯試與對接,并隨兩型飛機進行多個架次的飛行,飛機與懸掛物通訊均正常。經驗證,設計改進后的懸掛物可實現與飛機兩級總線的正常通信,滿足懸掛物在多型飛機上的掛載要求。
4 結語
本方法通過在懸掛物上增加一路離散量開關控制運行不同通信模式軟件的方法,滿足了懸掛物在固定、浮動通訊地址以及不同通信協議下均能正常
[1]國防科學技術工業委員會.GJB289A數字式時分制指令/響應型多路傳輸數據總線[S].北京:國防科學技術工業委員會,1998.
[2]龔德恩.離散控制系統理論引論[M].北京:中國鐵道出版社,2003.
[3]齊明俠.工程軟件設計[M].東營:中國石油大學出版社,2006.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代陜西(2019年11期)2019-06-24 03:40:28
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
